Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Регулировать скорость вращения двигателя можно, изменяя число пар полюсов обмотки статора.Содержание книги
Поиск на нашем сайте
Этот способ даёт ступенчатую регулировку.
Для изменения числа пар полюсов на статор укладыают несколько обмоток с разныи числом пар полюсов n 1 = f 1 ×60/ p Регулировать скорость вращения двигателя можно изменением частоты тока статора n 1 = f 1 ×60/ p.
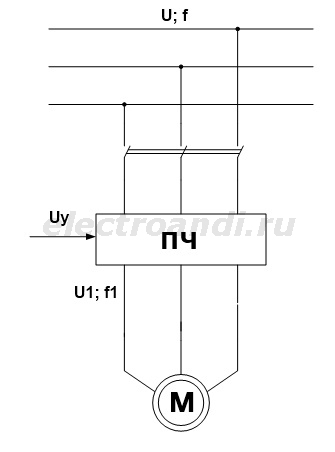
Для этого используется преобразователь частоты. Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Недостаток заключается в дороговизне частотного регулятора. При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя. В настоящее время выпускаются статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным. Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Потери и КПД асинхронных двигателей. КПД определяется по формуле
Сумма всех потерь в АД
КПД асинхронных двигателей мощностью 1 – 10 кВт η = 75- 88%, для двигателей более 10 кВт η = 90- 94%
Энергетическая диаграмма асинхронного двигателя. Фазное напряжение двигателя
Полная мощность, потребляемая АД
Электрические потери в обмотке статора
где токI1 из формулы выше r1 – сопротивление при рабочей температуре двигателя, нужен перерасчёт Рм–магнитные потери не зависят от нагрузки двигателя δ –зазор между статором и ротором
Электромагнитная мощность передаваемая от статора ротору
Электрические потери в обмотке ротора
РЭ2 можно также посчитать по формуле
где nНОМ – ближайшая синхронная скорость поля статора Рмех – потери на трение в подшипниках и вентиляцию зависят от скорости вращения ротора
Рдоб =0.005×Р1 в соответствии с ГОСТ
|
||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 97; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.142.42 (0.005 с.) |

 При р=1, n1 = 3000 об/мин, р=2, n1 = 1500 об/мин, р=3, n1 = 750 об/мини т.д.
При р=1, n1 = 3000 об/мин, р=2, n1 = 1500 об/мин, р=3, n1 = 750 об/мини т.д.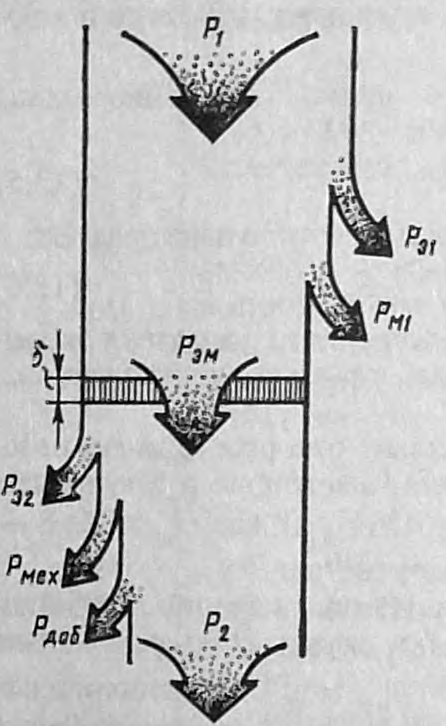

 при соединении обмотки статора звезда
при соединении обмотки статора звезда