Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Функционирование системы ЧПУСодержание книги
Поиск на нашем сайте
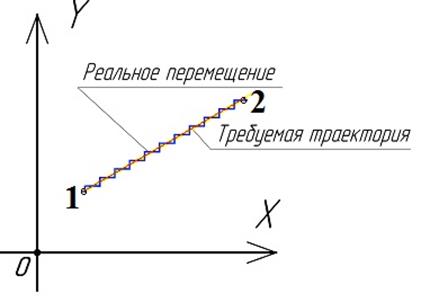
Функционирование всей системы станка осуществляется по управляющей программе. Программист создает управляющую программу, в которой содержится закодированная информация о траектории и скорости перемещения исполнительных органов станка, частоте вращения шпинделя и другие данные, необходимые для выполнения обработки. Подсистема управления читает эту программу, расшифровывает ее и вырабатывает траектории перемещения исполнительных органов. Рассмотрим простейший вариант – перемещение вдоль одной оси. Траекторию перемещения можно представить в виде графика, который показывает, в какой точке должен находиться исполнительный орган станка через определенные промежутки времени. В соответствии с траекторией перемещения подсистема управления посылает на соответствующий двигатель строго определенное количество электрических импульсов. Двигатель вращает ходовой винт, и исполнительный орган станка перемещается в указанную позицию (координату). Датчики обратной связи отправляют в подсистему управления информацию о действительной позиции исполнительного органа. Происходит сравнение фактической и требуемой (теоретической) позиций. Если между ними есть разница (ошибка перемещения), то подсистема управления посылает скорректированное на величину ошибки число электрических импульсов на двигатель. Этот процесс повторяется непрерывно, пока исполнительный орган станка не достигнет заданной позиции. При перемещении исполнительного органа всегда возникают ошибки. Главное, чтобы ошибки были настолько малы, что ими можно было бы пренебречь. Линейная интерполяция. Пусть требуется переместить рабочий стол прямолинейно, но не параллельно ни одной из осей станка (рис. 2.13). (!!!обработка конуса)
Рис. 2.13. Требуемая и фактическая траектория исполнительного органа
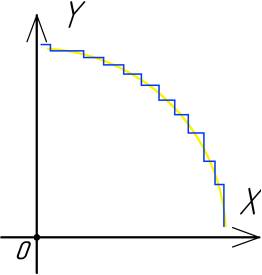
Для того чтобы выполнить такое перемещение, система ЧПУ вынуждена строить между точками 1 и 2 множество опорных точек и двигать рабочий стол по этим точкам «ступенчато», попеременно включая подачу то по одной оси, то по другой. При этом нужно поддерживать такое соотношение скоростей движения по осям, чтобы траектория перемещения соответствовала заданной траектории. Работу по расчету этих промежуточных опорных точек выполняет специальное устройство, входящее в состав подсистемы управления, – интерполятор. Он непрерывно в соответствии поддерживает функциональную связь между опорными точками и оценивает отклонения от заданной траектории, стремясь свести их к минимуму. Величина отклонения полученной «ступенчатой» траектории будет равна или кратна цене импульса системы ЧПУ. Так как в современных станках разрешение системы ЧПУ приближается к 1 мкм, то получаемое перемещение можно рассматривать как гладкое. Круговая интерполяция. Если необходимо выполнить перемещение по дуге, то интерполяция будет круговой (рис. 2.14).
Рис. 2.14. Схема круговой интерполяции
В случае перемещения по дуге выполняется так называемая линейная аппроксимация дуги, то есть замена дуги маленькими прямолинейными отрезками. Поэтому исполнительный орган станка также будет двигаться по «ступенчатой» траектории, которая при малой дискрете будет казаться абсолютно гладкой.
|
||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 584; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.89.201 (0.009 с.) |