Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Системы управления тактического уровня.
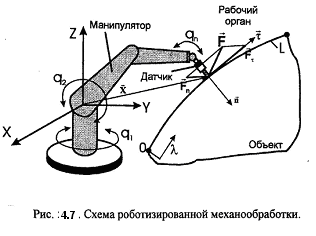
Система контурного силового управления Технологическим роботом Рассмотрим построение системы управления тактического уровня для технологического робота, выполняющего операции механообработки на основе параметрического подхода. Технологическая постановка задачи предполагает одновременное управление перемещением рабочего органа по заданной траектории (кривая L) и развиваемой в процессе движения силой (вектор F), которая воздействует на объект работ (рис. 4.7). Таким образом, в системе должны сочетаться методы контурного и силового управления движением робота.
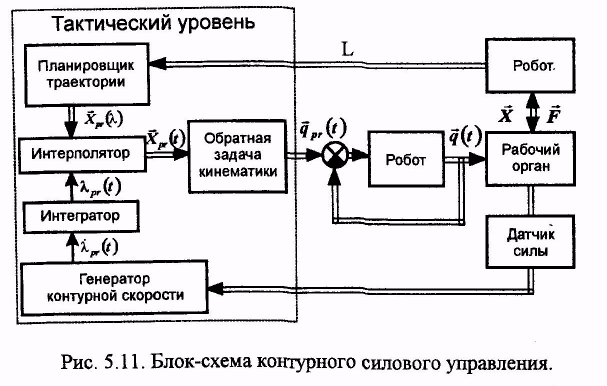
Приложение принципа двустороннего действия для технологических роботов требует учета их специфики как объекта автоматического управления, а также особенностей роботизированных технологических операций. На рисунке 4.8 приведена блок-схема системы контурного силового управления, которая обеспечивает адаптацию движения робота к возмущающему силовому воздействию. Силомоментный датчик, установленный в запястье манипулятора, дает информацию о силах, действующих непосредственно на рабочий орган. Силовая обратная связь замыкает систему управления на тактическом уровне, что в сочетании с обратными связями в исполнительных приводах обеспечивает необходимую точность движения. Вычислитель контурной скорости служит для задания технологически рационального скоростного режима движения робота по заданной траектории.
Рис. 4.8. Блок-схема контурного силового управления
Задачи интерполяции траектории и решения обратной задачи о положении выполняются управляющей ЭВМ в реальном масштабе времени. Результатом работы этих программ является формирование вектора обобщенных координат qpr(t), который определяет желаемые перемещения степеней подвижности манипулятора.
Особенность параметрического подхода состоит в независимом задании траектории рабочего органа в пространстве и в адаптивном управлении его контурной скоростью во времени. Раздельное формирование законов управления движением мехатронной системы в пространстве и во времени позволяет использовать различные критерии при их оптимизации, что соответствует постановке задач управления мехатронными системами. При этом движение рабочего органа как конечного управляемого звена обеспечивается согласованными перемещениями всех исполнительных приводов и звеньев манипулятора. Предлагаемый параметрический подход позволяет также учесть влияние рабочего процесса на движение робота при выполнении операции. Можно выделить два вида технологических возмущений при механообработке: а) погрешности базирования и формы объекта работ, которые имеют систематический характер для конкретного изделия; б) случайные изменения технологических параметров, например колебания припуска и локальные изменения свойств материала. Систематические погрешности в рассматриваемой системе учитываются на этапе программирования траектории L. Использование адаптивного регулятора позволяет компенсировать влияние отклонений технологических параметров, которые носят случайный характер. Таким образом, осуществляется комбинация коррекции траектории рабочего органа в пространстве (в режиме off-line) с адаптивным управлением контурной скоростью робота во времени (в режиме on-line). Использование параметрического подхода позволяет свести задачу адаптивного управления многомерной нелинейной системой «технологический робот – рабочий процесс» к синтезу адаптивного управления скалярным параметром – контурной скоростью. Решение этой задачи в реальном масштабе времени, как показали эксперименты, возможно с использованием серийно выпускаемых микропроцессорных устройств управления.
|
||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 470; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.178.157 (0.006 с.) |