Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Состав устройства управления бортовых манипуляторов космического корабля «Буран».Содержание книги
Поиск на нашем сайте
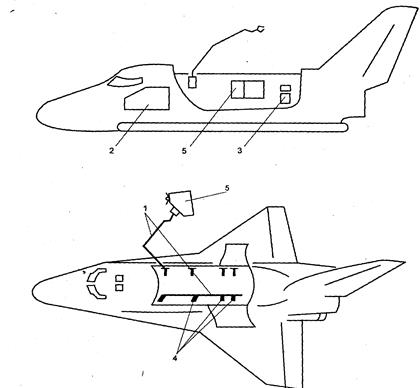
На рис. 7.2 и 7.3 показана система бортовых манипуляторов многоразового космического корабля "Буран". Манипуляторы шарнирные с шестью степенями подвижности имеют электрические приводы. Длина манипулятора — 15,3 м, усилие в захватном устройстве — 5 кгс. Наибольшая масса объекта манипулирования — 3 т. Линейная скорость с грузом — до 0,03 м/с, без груза — 0,6 м/с. Погрешность позиционирования — 5 мм. В исходном положении манипуляторы крепятся вдоль корабля с помощью ложементов. Захватные устройства манипуляторов — сменные. На кисти каждого манипулятора укреплена телевизионная камера. Кроме того, на корпусе корабля размещено несколько телевизионных камер и осветителей, в том числе 4 подвижные камеры находятся по краям грузового отсека, откуда с помощью манипуляторов берутся и куда помещаются транспортируемые кораблем грузы. Устройство управления манипуляторов с пультом управления размещено в кабине корабля. Система управления манипуляторами обеспечивает ручной, полуавтоматический и автоматический режимы управления. Для ручного управления оператор использует 2 задающие рукоятки, каждая из которых имеет 3 степени подвижности. Одна (левая) рукоятка служит для управления перемещением рабочего органа манипулятора, а другая (правая) — для его ориентации. В полуавтоматическом режиме осуществляется интерактивное управление, при котором оператор использует готовые управляющие подпрограммы, оперативно выбирая и последовательно вводя их в действие в ходе выполнения конкретного задания. В полностью автоматическом режиме управление ведется без участия оператора, за которым, однако, сохраняется функция контроля с возможностью вмешательства в любой момент в ход выполняемой программы. Основные функции системы манипуляторов космического корабля определяются его назначением по транспортировке грузов в своем грузовом отсеке с Земли на околоземную орбиту и обратно. Соответственно, с помощью манипуляторов должны осуществляться следующие операции: - выемка грузов из грузового отсека и перенос их в сторону от корабле - манипулирование этими грузами с целью их пристыковывания к другим объектам или развертывания (раскрытия) для самостоятельней работы на орбите, антенные системы, солнечные батареи и т. п.); 1
- захват свободно летающих объектов и помещение их в грузовой отсек; - инспекция объектов, находящихся на околоземной орбите; - сборочно-монтажные и ремонтные работы с объектами на околоземной орбите.
Рис. 7.1. Размещение системы манипуляторов на многоразовом космическом корабле "Буран": 1 — манипуляторы; 2 — устройство управления; 3 — подвижная передающая телекамера; 4 — ложементы; 5— полезный груз
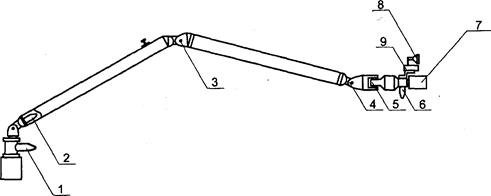
Рис. 7.2.Манипулятор космического корабля "Буран" (ЦНИИ РТК): 1—6 — шарниры; 7 — схват; 8 — осветитель; 9 — телевизионная камера На рис. 7.3 в качестве примера показана схема управления двумя бортовыми манипуляторами многоразового космического корабля «Буран», которая реализует следующие режимы управления: - автоматическое программное управление типовыми технологическими операциями (взятие полезного груза в грузовом отсеке корабля; с орбиты, перемещение груза или рабочего органа ненагруженного манипулятора в заданную точку окружающего пространства, выполнение какой-либо запланированной технологической операции); - автоматизированное управление с помощью телевизионной системы целеуказания; - ручное командное управление отдельными приводами манипуляторов с подвижными передающими телевизионными камерами и светильниками; расположенными на бортах корабля. Оба манипулятора идентичны. Они имеют шарнирную кинематику с 6 степенями подвижности на электроприводах. Алгоритмы автоматического управления включают решение задачи планирования путем построения программных траекторий с учетом препятствий. Последние моделируются простыми телами: параллелепипедом, цилиндром, шаром, а траектория — кубическим сплайном. В описании динамики манипулятора учитываются его гибкость и нелинейности, включая сухое и вязкое трения.
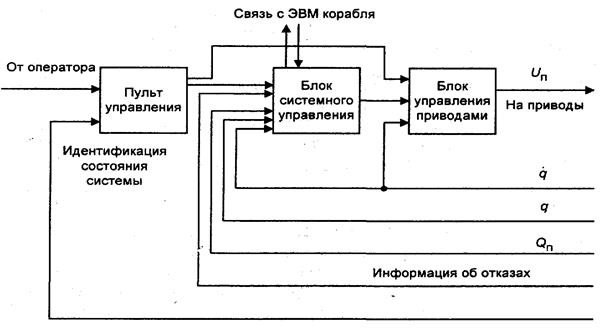
Рис. 7.3. Состав устройства управления бортовых манипуляторов космического корабля "Буран" В системе управления с помощью задающих рукояток применены две трехстепенные рукоятки: одна для управления переносными, а другая — ориентирующими степенями подвижности рабочего органа. Алгоритм управления основан на решении обратной задачи кинематики для скорости. При этом для того, чтобы оператор мог осуществлять управление манипулятором по одним и тем же правилам вне зависимости от места расположения используемых передающих телекамер, а также при наблюдении через иллюминатор кабины, используется специальный алгоритм интерпретации задающих рукояток, при котором наблюдаемая оператором картина не зависит от используемого визуального канала.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 400; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.129.67.120 (0.008 с.) |