
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Сократительный аппарат мышц.Содержание книги
Поиск на нашем сайте Внутри волокна, кроме известных органелл (ядро, ядрышко, митохондрии, аппарат Гольджи и др.), находятся сократительный аппарат клетки, состоящий из 1000 - 2000 параллельно расположенных миофибрилл диаметром 1-2 мкм, а также клеточные органеллы: саркоплазматический ретикулум и система поперечных трубочек - Т-система.
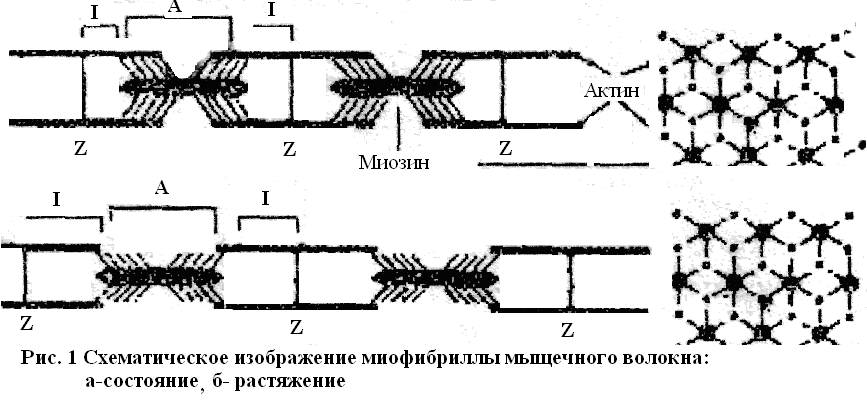
схема расположения актина и миозина на поперечном срезе. В миофибриллах различают: А -зону - темные полосы, которые в поляризованном свете дают двойное лучепреломление, т.е. обладают свойством анизотропии (отсюда и название: А -зона), I -зону - светлые полосы, не дающие двойного лучепреломления, то есть изотропные (отсюда название: I -зона). В области I-зоны проходит темная узкая полоса – Z-диск. Промежуток между двумя Z-дисками называется саркомером и является элементарной сократительной единицей мышечной клетки. Саркомер - это упорядоченная система толстых и тонких нитей, расположенных гексагопально в поперечном сечении. Толстая нить имеет толщину - 12 нм и длину - 1,5 мкм и состоит из белка миозина. Тонкая нить имеет диаметр 8 нм, длину 1 мкм и состоит из белка актина, прикрепленного одним концом к Z-диску.
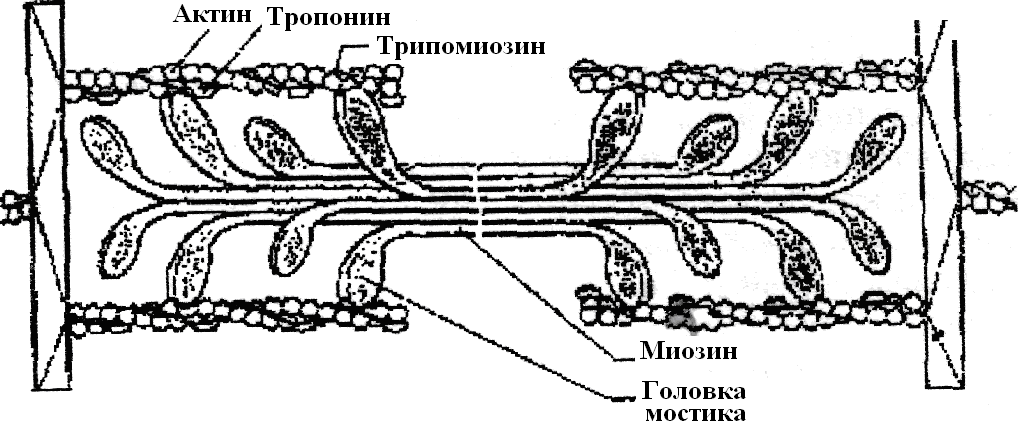
Рис.2. Микроструктура саркомера.
Актиновая нить состоит из двух закрученных один вокруг другого мономеров актина толщиной по 5 нм (рис. 2). Эта структура похожа на две нитки бус, скрученные по 14 бусин в витке. В цепях актина регулярно примерно через 40 нм встроены молекулы тропонина, а сама цепь охватывает нить тропомиозина. При сокращении мышцы тонкие нити вдвигаются между толстыми нитями. Происходит относительное скольжение нитей без изменения их длины. Этот процесс обусловлен взаимодействием особых выступов миозина - поперечных мостиков с активными центрами, расположенными на актине. Мостики отходят от толстой нити периодично на расстоянии 14,5 нм друг от друга. В расслабленном состоянии миофибрил молекулы тропомиазина блокируют прикрепление поперечных мостиков к актиновым цепям Ионы Са активируют мостики и открывают участки их прикрепления к актину (рис. б). В результате мостики миозина прикрепляются к актиновым нитям, расщепляются молекулы АТФ и изменяется конфирмация мостиков: их головки поворачиваются внутрь саркомера (Рис.3. в). Это приводит к генерации силы, скольжению актина относительно толстой нити миозина к центру саркомера, что вызывает укорочение мышцы. После окончания активации мостик размыкается и саркомер возвращается в исходное состояние. При укорочении объем саркомера практически не меняется, следовательно, он становится толще, что и подтверждается на снимках поперечного сечения мышц с помощью электронной микроскопии. Каждый цикл замыкание - размыкание сопровождается расщеплением одной молекулы АТФ. Таким образом, актин - миозиновый комплекс является механохимическим преобразователем энергии АТФ. Рассмотренная структура и последовательность процессов называется моделью скользящих нитей. Впервые скольжение нитей в саркомере было обнаружено английским ученым Х.Хаксли. Он же сформулировал модель скользящих нитей. Существенный вклад в разработку теории скользящих нитей внес В.И. Дещеревский, Представленная структурная модель скользящих нитей надежно подтверждена экспериментально и является опытным фактом, на котором основаны все современные теории мышечного сокращения. Эксперементальные данные о микроструктуре мышц были изучены с помощью электронной микроскопии, рентгеноструктурного анализа и метода дифракции синхротронного излучения. 52. Основные положения модели скользящих нитей: 1. Длины нитей актина и миозина в ходе сокращения не меняются. 2. Изменение длины саркомера при сокращении - результат относительного продольного смещения нитей актина и миозина. 3. Поперечные мостики, отходящие от миозина, могут присоединяться к комплементарным центрам актина. 4. Мостики прикрепляются к актину не одновременно. 5. Замкнувшиеся мостики подвергаются структурному переходу, при котором они развивают усилие, после чего происходит их размыкание. 6. Сокращение и расслабление мышцы состоит в нарастании и последующем уменьшении числа мостиков, совершающих цикл замыкaние - размыкание. 7. Каждый цикл связан с гидролизом одной молекулы АТФ. 8. Акты замыкания-размыкания мостиков происходят не зависимо друг от друга. Возможность саркомера сократиться и развить усилие в большой степени зависит от начальных условий. Если саркомер изначально растянут (его длина 3,65 мкм), то мостики не перекрываются актиновыми нитями и при стимуляции такого элемента усилие не формируется (стрелка 1 на рис. 4, а и фрагмент 1 на рис. 4, б). Если саркомер находится в рабочем начальном состоянии (размер саркомера 2,2 мкм), то при стимуляции он разовьет максимальную силу (стрелка 2, рис. 4, а и фрагмент 2 рис. 4, б). Если начальный размер саркомера слишком короток, генерация усилия уменьшается (стрелка и фрагмент 5). Рис. 4. Зависимость максимального значения развиваемой силы Р, развиваемой при изометрическом сокращении от начальной длины саркомера l (а) и степени перекрытия актиновых и миозиновых нитей (б). Биомеханика мышцы Мышцы можно представить как сплошную среду, т.е. среду, состоящую из большого числа элементов, взаимодействующих между собой без соударений и находящихся в поле внешних сил. Мышца одновременно обладает свойством упругости и вязкости, то есть является вязко-упругой средой. Для такой среды используются законы классической механики. Фундаментальными понятиями механики сплошных сред являются деформация, напряжение, упругость, вязкость, а также энергия и температура. а). Упругость - свойство тел менять размеры и форму под действием сил и самопроизвольно восстанавливать их при прекращении внешних воздействий. Упругость тел обусловлена силами взаимодействия его атомов и молекул. При снятии внешнего воздействия тело самопроизвольно возвращается в исходное состояние. б) Вязкость – внутренне трение среды. в). Вязкоупругость– это свойство материалов твердых тел сочетать упругость и вязкость. г) Деформация относительное изменение длины: где l -начальная длина, д) Напряжение механическое Упругая деформация возникает и исчезает одновременно с нагрузкой и не сопровождается рассеянием энергии. Для упругой деформации справедлив закон Гука: где Е - модуль Юнга, определяемый природой вещества. При растяжении различных материалов, в общем случае, Таблица значений модуля Юнга для различных материалов.
Эластин - упругий белок позвоночных, находится, в основном, в стенках артерий. Коллаген - волокнистый белок. В мышцах 20 % всех белков – коллаген, он находится также а сухожилиях, хрящах, кости. В случае вязкой среды напряжение Для вязкоупругой деформации характерна явная зависимость Пассивные механические свойства вязкоупругой среды можно моделировать сочетанием упругих и вязких элементов. Мышца не является ни чисто упругим, ни чисто вязким элементом. Мышца - вязкоупругий элемент. Пассивное растяжение. На основании расчетных и экспериментальных данных показано, что наиболее простой моделью, дающей достаточно хорошее приближение кмеханическим свойствам мышцы, является трехкомпонентная модель Хилла. Для установления характерной зависимости деформации мышцы во времени при приложении к ней мгновенного воздействия упростим модель (рис. 5). Допустим, что элемент Е2, отсутствует ( Найдем зависимость где величина Скорость нарастания деформации максимальна при t = 0: Отсюда следует, что чем больше величина вязкой компоненты Деформация Таким образом, уравнение достаточно хорошо описывает процесс нарастания деформации В терминах механической модели (рис, 5) и модели скользящих нитей (рис. 3} параллельный упругий элемент Е1, определяет механические свойства внешних мембран клеток (сарколеммы) и внутренних структур - Т-системы и саркоплазматического ретикулума. Последовательный элемент Е2 определяет упругость актин-миозинового комплекса, обусловленную, прежде всего, местами прикрепления актина к Z-дискам и местами соединения мостиков с активными центрами тонких нитей. Вязкий элемент Важно, что уже в этой модели было показано существование вязкой компоненты в мышце, но физическая природа ее оста вались не ясной. Активное сокращение мышцы. Для исследования характеристик сокращающихся мышц используют два искусственных режима: 1. Изометрический режим, при котором длина мышцы l = const, а регистрируется развиваемая сила F(t). 2. Изотонический режим, при котором мышца поднимает постоянный груз Р = const, а регистрируется изменение ее длины во времени При изометрическом режиме с помощью фиксатора (рис 6. а) предварительно устанавливают длину мышцы l. После установки длины на электроды Э подается электрический стимул, и с помощью датчика регистрируется функция F(t). Вид функции F(t) в изометрическом режиме для двух различных длин представлен на рис. 7, а. Максимальная сила Рп, которую может развивать мышца, зависит от ее начальной длины и области перекрытия актиновых и миозиновых нитей, в которой могут замыкаться мостики: при начальной длине саркомера 2,2 мкм в сокращении участвуют все мостики (см. рис. 4). Поэтому максимальная сила генерируется тогда, когда мышца предварительно растянута на установке (рис, 6, а) так, чтобы длины ее саркомеров были близки к 2,2 мкм. На рис. 7, а это соответствует начальным длинам двух мышц При изотоническом режиме к незакрепленному концу мышцы подвешивают груз Р (рис.6,б). После этого подаётся стимул и регистрируется изменение длины мышцы во времени: Как следует из рис. 7, б, чем больше груз Р, тем меньше укорочение мышцы и короче время удержания груза. При некоторой нагрузке Р = Р0 мышца совсем перестает поднимать груз; это значение. Р0 и будет максимальной силой изометрического сокращения для данной мышцы (рис. 7. а). Здесь важно отметить, что при увеличении нагрузки угол наклона восходящей части кривой изотонического сокращения уменьшается (рис. 7,б):
|
||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 519; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.20 (0.011 с.) |

 ,
, - значение удлинения,
- значение удлинения,  может изменять знак.
может изменять знак. - мера внутренних сил, возникающих при деформации материала. Для однородного стержня:
- мера внутренних сил, возникающих при деформации материала. Для однородного стержня:  , где S ~ площадь сечения, F - сила,
, где S ~ площадь сечения, F - сила,  приложенная к стержню.
приложенная к стержню.
 . При малых растяжениях считают Е=const.
. При малых растяжениях считают Е=const.




 определяется скоростью деформации d
определяется скоростью деформации d  /dt,
/dt,  , где
, где  - коэффициент вязкости среды.
- коэффициент вязкости среды. от процесса нагружения во времени, причём при снятии нагрузки деформация с течением некоторого времени самопроизвольно стремится к нулю.
от процесса нагружения во времени, причём при снятии нагрузки деформация с течением некоторого времени самопроизвольно стремится к нулю. ). Тогда для вязкоупругой среды напряжение в системе будет определиться упругой
). Тогда для вязкоупругой среды напряжение в системе будет определиться упругой  с и вязкой
с и вязкой  составляющими:
составляющими: 
 (t), решая дифференциальное уравнение и считая, что в начальный момент времени t = 0 деформация
(t), решая дифференциальное уравнение и считая, что в начальный момент времени t = 0 деформация 
 называется временем запаздывания.
называется временем запаздывания.
 , тем меньше угол наклона кривой
, тем меньше угол наклона кривой  :
: 
 обусловлен скольжением нитей актина относительно миозина. Эта компонента резко возрастает при пассивном режиме мышцы, т. к. в этом случае мостики разомкнуты. Это проявляется в возможности сильного растяжения пассивной мышцы даже при незначительных нагрузках.
обусловлен скольжением нитей актина относительно миозина. Эта компонента резко возрастает при пассивном режиме мышцы, т. к. в этом случае мостики разомкнуты. Это проявляется в возможности сильного растяжения пассивной мышцы даже при незначительных нагрузках. .
. . Но, т. к. количество мостиков в мышце
. Но, т. к. количество мостиков в мышце  , больше, чем в мышце
, больше, чем в мышце  (
( ), то сила, генерируемая 1г больше.
), то сила, генерируемая 1г больше. . Вид этой функции в изотоническом режиме для двух различных нагрузок показан на рис. 7.б.
. Вид этой функции в изотоническом режиме для двух различных нагрузок показан на рис. 7.б. <
<  . Другими словами, скорость укорочения с ростом нагрузки падает.
. Другими словами, скорость укорочения с ростом нагрузки падает.


