
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Геометрическая схема теодолитаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Центрирование теодолита Центрирование - это совмещение оси вращения прибора с отвесной линией, проходящей через вершину измеряемого угла. Оно выполняется с помощью шнурового отвеса. Шнур одевают на крючок станового винта. Передвигая планку, изменяют длину шнура так, чтобы остриё отвеса находилось на высоте 1...2 см от точки. Изменяют длину ножек штатива (предварительно ослабив барашки) так, чтобы остриё отвеса отклонялось не более чем на 1...2 см от точки. При этом головка штатива должна быть примерно горизонтальной. Затем ослабляют становой винт и передвигают прибор на головке штатива до совмещения острия отвеса с точкой с точностью 3...5 мм. Становой винт закрепляют.
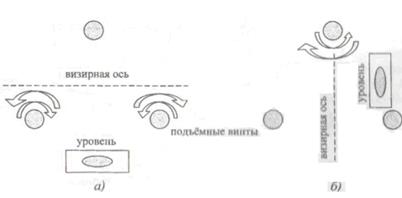
Горизонтирование теодолита Горизонтирование — это приведение оси вращения прибора в отвесное положение. Оно выполняется с помощью подъёмных винтов и уровня при алидаде. Поворотом алидады устанавливают уровень по направлению двух подъёмных винтов (рис. 2.5,а). Вращая их в разные стороны, устанавливают пузырёк уровня симметрично относительно центра ампулы - приводят пузырёк уровня в нулъпункт.
Рис. 2.5
Поворачивают алидаду на 900 (рис. 2.5,6). При этом объектив или окуляр трубы расположится над третьим подъёмным винтом. Вращая этот винт, приводят пузырёк уровня в нульпункт. Точность горизонтирования 0,5...1 деление уровня. Подготовка трубы к наблюдениям Подготовка трубы к наблюдениям - это фокусировка (установка) трубы по глазу наблюдателя. Для этого вращают диоптрийное кольцо 7 окуляра (рис. 1.1) и добиваются отчётливого изображения сетки нитей.
Визирование на точку Визирование - это наведение центра (креста) сетки нитей на наблюдаемую точку. Закрепляют лимб. Ослабив закрепительные винты алидады 11 и трубы 12 (рис. 2.2), с помощью визира 9 наводят трубу на марку (наблюдаемую точку). При этом глаз следует располагать на расстоянии 5…20 сантиметров от окуляра. Закрепляют закрепительные винты. С помощью кремальеры 8 фокусируют трубу по предмету, т.е. получают резкое изображение наблюдаемой марки. С помощью наводящих винтов 14, 15 (рис. 2.1) совмещают крест сетки с центром марки.
Отсчитывание по кругам Отсчёты по кругам делают с помощью шкалового микроскопа, окуляр которого расположен рядом с окуляром трубы. Яркость поля зрения микроскопа регулируют с помощью зеркала 19. Резкое изображение штрихов лимбов устанавливают вращением диоптрийного кольца 18 (рис. 2.1). Горизонтальный и вертикальный круги теодолита 2Т30 разделены через 1°. Каждый градусный штрих оцифрован. Поле зрения микроскопа теодолита 2Т30 показано на рис. 2.4. В верхней части, отмеченной буквой В, видны штрихи вертикального круга и шкалы, а в нижней, отмеченной буквой Г, - штрихи горизонтального круга и шкалы. Угловой размер шкал равен одному градусу. Шкала содержит шесть больших - десятиминутных - делений. Каждое большое деление разделено пополам, т.е. всего на шкале 12 делений, а цена наименьшего деления шкалы составляет 5'. Отсчетным индексом служит градусный штрих лимба, находящийся в пределах шкалы. Отсчет берут с точностью 0,1 наименьшего деления шкалы, т.е. с точностью 0,5'. Следует помнить, что в пределах шкалы может находиться только один градусный штрих лимба. По шкале для горизонтального круга минуты отсчитывают всегда слева направо от нуля шкалы до градусного штриха лимба. На рис. 2.4 отсчёт по горизонтальному кругу составляет 225° + 10' + 0,4.5' = 225° 12,0'. Шкала для вертикального круга имеет двойную оцифровку. По нижнему ряду цифр (отрицательной шкале) берут отсчёт справа налево, когда в пределах шкалы находится штрих вертикального круга с отрицательным знаком. На рис. 2.4 отсчёт по вертикальному кругу составляет -(2° + 35' + 0,5 . 5') = -2° 37,5’. Если в пределах шкалы вертикального круга находится штрих лимба без знака, минуты и их доли отсчитывают по верхнему (положительному) ряду цифр слева направо.
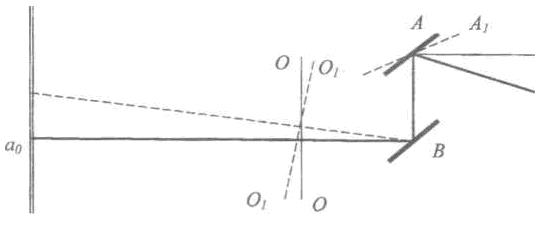
Устройство и поверки точных и технических нивелиров Нивелиры с компенсатором Такие нивелиры имеют две основные части: трубу и оптико-меха- нический компенсатор наклона оси вращения. Компенсатор работает в небольшом диапазоне (±10...30'). Предварительная установка оси вращения в отвесное положение выполняется с помощью подъемных винтов по круглому уровню, цена деления которого должна быть меньше диапазона работы компенсатора. Принципиальная схема работы компенсатора показана на рис. 2.17 рейка
Рис. 2.17
Компенсатор состоит из двух элементов: неподвижного А, скрепленного с корпусом трубы, и подвижного В, свободно подвешенного на нитях, лентах или подшипниках. При отклонении оси вращения прибора О1О1 от отвесного положения ОО наклоняется труба, а с ней смещается и сетка нитей С. Точка подвеса элемента В выбирается так, чтобы при отклонении оси вращения прибора в сместившееся положение сетки нитей С1 приходил луч от отсчета а0, соответствующего горизонтальному положению визирной оси. Сетка нитей нивелиров с компенсатором обязательно снабжается юстировочными винтами. Нивелир типа Н-ЗК (рис. 2.13) выпускался под шифром Н-ЗК, Н-ЗКЛ. Нивелир типа Н-10К (рис. 2.14) выпускался под шифром Н-10КЛ, 2Н-10КЛ. Все эти нивелиры снабжены бесконечным наводящим винтом, а для наблюдения за положением пузырька круглого уровня в процессе работы имеют зеркало. Нивелир 2Н-10КЛ имеет следующие важные особенности: кнопку-толкатель для проверки работоспособности компенсатора и фиксатор, позволяющий отключать компенсатор и тем самым предохранять его от поломки при транспортировке.
Технические характеристики нивелиров с компенсатором
Нивелирные рейки Нивелиры Н-3 и Н-5 используются в комплекте с двумя рейками типа РН-3, которые выпускаются иод шифром РН-3-3000С, 2РН-3-3000СП, ЗРН- 3-3000СП. Буква С в шифре означает складную рейку, буква П - цифры прямого изображения, число 3000 - длину рейки 3 м. Рейка РН-3-3000С - деревянная двусторонняя шашечная с сантиметровыми делениями. На основной (черной) стороне нулевое деление шкалы совпадает с пяткой рейки. На дополнительной (красной) стороне оцифровка сдвинута на 4683 мм на первой и на 4783 мм на второй рейке комплекта. На обеих сторонах реек подписаны все дециметровые деления, изображение цифр обратное. Рейка 2РН-3-3000СП аналогична предыдущей, но на дополнительной (красной) стороне оцифровка шкалы сдвинута на 3335 мм. Изображение цифр прямое. Рейка ЗРН-З-ЗОООСП разборная металлическая односторонняя с прямым изображением цифр. Рейка состоит из метровых секций. Шкала каждой нечетной секции раскрашена в черный цвет, четной - в красный. При использовании секций второй рейки длина может быть увеличена до 5 м. Нивелир Н-10 используется в комплекте с рейками типа PH-10, которые выпускаются под шифром РН-10-3000С (или -4000С), РН-Ю-ЗОООСП (или -4000СП). Эти рейки аналогичны рейкам РН-3. С пяткой рейки на красной стороне совпадает отсчет 4700 или 4800.
Поверка круглого уровня Условие: ось круглого уровня АА должна быть параллельна оси вращения прибора ОО. Осью круглого уровня называют нормаль к внутренней поверхности крышки ампулы круглого уровня в нульпункте. С помощью подъемных винтов приводят пузырек круглого уровня в нульпункт. Поворачивают трубу нивелира на 180. Если пузырек уровня остался в нульпункте, то условие выполнено. Если пузырек сместился более чем на одно деление, то производят юстировку уровня. Для этого возвращают пузырек к нульпункту на половину отклонения с помощью подъемных винтов. Окончательно приводят пузырек в нульпункт, вращая юстировочные винты круглого уровня. Эти винты в нивелире Н-3 расположены под уровнем и вращаются шпилькой. В нивелирах Н-ЗК, Н-5 и Н-10КЛ они расположены над уровнем и вращаются отверткой. Для контроля поверку повторяют.
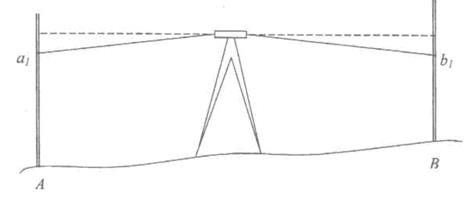
Поверка главного условия нивелира. Условие: визирная ось VV трубы нивелира в момент отсчета по рейке должна быть горизонтальна. Для нивелиров с цилиндрическим уровнем и с компенсатором это условие формулируется по-разному. Для нивелиров с цилиндрическим уровнем: визирная ось VV должна быть параллельна оси цилиндрического уровня UU. Для нивелиров с компенсатором: визирная ось VV должна оставаться горизонтальной при наклоне оси вращения прибора в пределах расчетного угла компенсации. Поверка главного условия может выполняться различными способами. В лабораторных условиях студенты выполняют эту поверку на специальном стенде способом двойного нивелирования одних и тех же точек, расстояние между которыми около 50 м. Первое нивелирование выполняется из середины (рис. 2.21), т.е. с равными расстояниями от нивелира до реек (плечами), второе - с неравными плечами (рис. 2.22). В точках А и В устанавливают рейки, между ними точно в середине устанавливают нивелир, приводят его в рабочее положение и берут отсчеты по рейкам а1 и b1. Вычисляют правильное значение превышения h1 = a1 – b1
Рис. 2.21
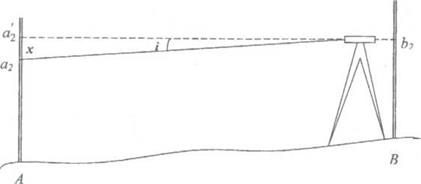
Выполняют второе нивелирование тех же точек. Нивелир устанавливают перед передней точкой В на расстоянии 2...2,5 м от неё. Приводят прибор в рабочее положение, берут отсчеты a2 и b2 и снова вычисляют превышение h2 = a2 – b2
Рис. 2.22
По действующим инструкциям допустимая величина угла негоризонталыюсти визирной оси равна 10", что соответствует 2,5 мм погрешности в отсчете по рейке при расстоянии между точками А и В 50 м. В лабораторных условиях этот допуск увеличивают примерно в два раза и полагают: если разность полученных превышений х = h1 – h2 ≤ 4 мм, то условие считают выполненным. В противном случае производят юстировку. Для этого вычисляют правильный отсчет а2' (рис. 4.14)
Например: а1 = 1578 b1 = 1225 h1 = + 353 а2 = 1420 b2 = 1090 h2 = + 330 х = + 23 > 4 мм а2' = 1420 + 23 = 1090 + 353 = 1443. При юстировке нивелиров с цилиндрическим уровнем правильный отсчет а2 устанавливают на рейке с помощью элевационного винта. При этом пузырек цилиндрического уровня сойдет с нульпункта. Вращая шпилькой вертикальные юстировочные винты этого уровня, возвращают пузырек в нуль-пункт. Юстировочные винты расположены под крышкой слева от окуляра. В нивелире Н-3 за контактом концов пузырька в процессе юстировки наблюдают в окуляр. При юстировке нивелиров с компенсаторами центр сетки нитей совмещают с правильным отсчетом а3, вращая вертикальные юстировочные винты сетки нитей. В нивелире Н-ЗК эти винты вращают отверткой, в нивелире Н-10К - шпилькой. При работе с юстировочными винтами следует помнить правило: сначала ослабляют один винт, затем подтягивают второй; если юстировочных винтов четыре, т.е. два горизонтальных и два вертикальных, то сначала слегка ослабляют горизонтальные винты, а затем вращают вертикальные. Для контроля поверку повторяют. Например: а3 = 1444 b3 = 1090 h3 = + 354 х = h1 - h3 = - 1 мм < 4 мм. При выполнении поверки главного условия нивелира на учебной практике расстояние между точками А и В выбирают равным 50...75 м. Удобно выполнять эту поверку на специальном стенде, где превышение между точками А и В равно нулю. В таком случае а2' = b 2, т. е. на дальней рейке сразу устанавливают тот отсчет, который виден на ближней рейке.
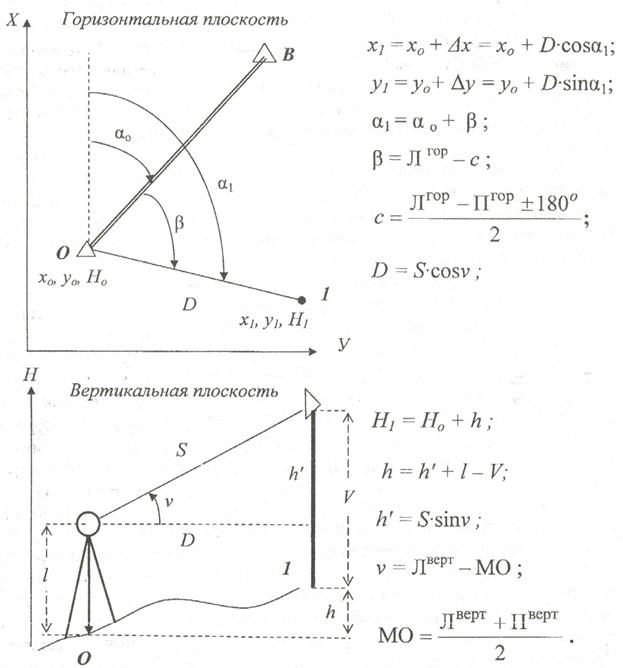
Электронные тахеометры Современное состояние науки и техники позволило по-другому подойти к традиционным вопросам геодезии. Столетиями господствовавшее направление: детальное изучение устройства приборов, их поверок и исследований, методики измерений, изучение теории математической обработки измерений - быстро уступает место принципиально новому подходу: 1.Прибор должен быть абсолютно надёжным, не требующим постоянных поверок и юстировок. Вместо этого должна проводиться ежегодная метрологическая (профилактическая) аттестация прибора. 2.Прибор должен быть высокоточным, не требующим применения сложной методики измерений. Отклонения осей от теоретической геометрической схемы должны автоматически учитываться в процессе работы. С высокой точностью должны определяться все три координаты точки. 3.Результаты измерений должны приводить к минимальным невязкам, не требующим строгой математической обработки. Такой подход определил появление электронного тахеометра, или общей измерительной станции (total station). В последние годы электронные тахеометры окончательно вытеснили традиционные оптические теодолиты и светодальномеры как отдельные приборы. Электронный тахеометр стал основным прибором для выполнения топографических съёмок, разбивочных работ, решения разнообразных инженерно геодезических задач. Трудно указать задачу, которая не могла бы решаться с помощью современного электронного тахеометра. Объёмы продаж электронных тахеометров неуклонно растут. Электронный тахеометр состоит из цифрового теодолита, цифрового светодальномера, мощного микропроцессора с набором прикладных программ, электронного накопителя информации, устройства связи с компьютером. Все ведущие приборостроительные фирмы мира выпускают электронные тахеометры: Sokkia, Nikon, Trimble, Leika. Уральский оптико-механический завод выпускает электронный тахеометр ЗТа-5. Выпускается целый спектр тахеометров, обладающих различной точностью измерения углов (1 - 7") и линий (1-5 мм), различными возможностями и условиями обслуживания. Конструкция тахеометров постоянно совершенствуется: • увеличивается мощность излучателя светодальномера, что позволяет измерять расстояния до 1200 м без установки на определяемой точке отражателя или использовать плёночные отражатели; • тахеометр снабжается двухосевыми компенсаторами, лазерным визиром, створоискатслем, алфавитно-цифровой клавиатурой, графическим дисплеем, цифровыми фотокамерами. Работа исполнителя (оператора такого прибора) сводится к визированию на цель (обычно - веху с отражателем) и нажатию кнопки отсчёта. Наиболее квалифицированным, знающим и понимающим местность, её рельеф и контурную нагрузку, должен быть человек, выбирающий место установки отражателя, т.е. бывший рабочий. Большую часть времени оператор тратит на приближённое наведение, перефокусировку трубы, точное наведение. Через несколько часов такой работы внимание оператора снижается, устают глаза, руки, ноги, спина, шея. Поэтому дальнейшее развитие конструкций тахеометров идёт по пути их роботизации, т.е. создания приборов: - с сервомоторами (простых); - со следящей системой (полуроботов); - с дистанционным управлением (роботов). Эти конструкции принципиально отличаются от любого отечественного прибора: их создатели стараются обеспечить комфорт и удобство эксплуатации, что прямо сказывается на производительности и качестве работы. 1.Тахеометр с сервомоторами. Прибор не имеет закрепительных винтов. Вместо наводящих винтов используются маховики управления сервомоторами. Чем быстрее оператор вращает маховик, тем быстрее поворачивается прибор. 2.Тахеометр со следящей системой. Эта система смонтирована в блоке зрительной трубы под объективом и способна принимать сигнал от излучателя, закреплённого на вехе вместе с призмой-отражателем (активный отражатель). Следящая система тахеометра удерживает прибор в состоянии наведения на отражатель. При перемещении вехи с отражателем сервомоторы разворачивают прибор в направлении на излучатель. При этом прибор удерживает только одну цель и не перемещается за более яркими объектами. Производительность работы с использованием такого прибора повышается примерно на 50%. Оператор только нажимает кнопку отсчета и подаёт команду на переход отражателя. 3.Тахеометр с дистанционным управлением отличается от предыдущей конструкции тем, что не требует оператора: сам наводится на отражатель, сам записывает отсчёты, сам подаёт команду на переход отражателя. Исполнитель работ один: он только устанавливает прибор на станции, ориентирует его, вводит исходные данные и далее перемещается с отражателем по точкам, подлежащим съёмке. Пока наибольшим спросом на отечественном рынке пользуются обычные электронные тахеометры. Заложенные в микропроцессор любого электронного тахеометра основные формулы следуют из рис. 2.1.
Рис. 2.24
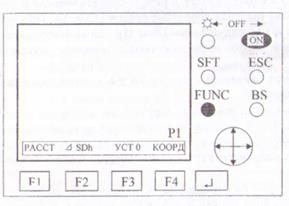
α0 и α1 – дирекционные углы исходной и определяемой сторон β, υ – горизонтальный и вертикальный углы на определяемую точку S – наклоння длина измеряемой линии, D – горизонтальное проложение h – превышение между исходной и определяемо точками h´ - превышение, вычисляемое по измеренному вертикальному углу l – высота прибора, V – высота визирной цели (отражателя на вехе) Лгор, Пгор, Лверт, Пверт – отсчеты по горизонтальному и вертикальному кругам. Рассмотрим принципиальное устройство такого прибора на примере электронного тахеометра SET-330R японской фирмы SOKKIA. Этот тахеометр полностью русифицирован, имеет двустороннее табло, лазерный указатель направления, точность измерения расстояний - 2 мм, точность измерения углов - 3", измеряет расстояния до ста метров без отражателя. При отключении прибора все показатели сохраняются. При топографической съёмке используют три режима работы прибора: • основной режим измерений - режим полярных координат; • режим тригонометрического нивелирования; • режим прямоугольных координат. Панель управления тахеометра снабжена клавишами, аналогичными клавиатуре компьютера. Это 12 функциональных клавиш F - по 4 на каждой из трёх рабочих страниц (PI, Р2, РЗ), ENTER, стрелки для передвижения по экрану во все четыре стороны, клавиша BS (удаление символа слева), FTJNC (выбор нужной страницы), ESC (листание окон табло назад), SFT (Shift - переключение регистров и выбор типа отражателя), ON (включение прибора), ft (подсветка экрана и включение/выключение лазерного указателя). Одновременное нажатие на клавиши ON и ft выключает прибор. На рис. 2.25 показан вид панели управления, где надписи функциональных клавиш на табло соответствуют первой рабочей странице (Р1).
Рис. 2.25
После включения и горизонтирования прибора на табло устанавливается основной режим измерений - режим полярных координат. Слева высвечиваются: надпись «Измерения», значения наклонного расстояния, вертикального и горизонтального углов. Справа будут показаны: постоянная стандартной призмы (если измерения велись на отражатель), поправка за метеоусловия (ррm - в мм/км), тип используемого отражателя (смена типа отражателя клавишей SFT) и остаточный заряд аккумулятора, указатель включения двухосевого компенсатора, номер страницы режима измерений (PI, Р2, Р3).
В нижней строке табло на первой странице (Р1) в основном режиме: • над клавишей F1 будет надпись РАССТ - при нажатии на эту клавишу прибор измеряет расстояние в заданном режиме, вычисляет результаты и выдаёт на табло значения измеренного наклонного расстояния S, вертикального ВУ и горизонтального ГУ углов; • над клавишей F2 будет надпись S D h — при нажатии на эту клавишу прибор переходит в режим тригонометрического нивелирования, а на табло отражаются значения наклонной длины S, горизонтального проложения D и превышения А (над уровнем горизонтальной оси вращения трубы, что соответствует h' на рис. 2.1); • над клавишей ГЗ будет надпись УСТ 0 (ориентирование лимба) -при нажатии на эту клавишу надпись УСТ 0 мигает; при повторном нажатии на клавишу F3 происходит обнуление отсчёта по горизонтальному кругу, т.е. ориентирование лимба; • над клавишей F4 будет надпись КООРД - при нажатии на эту клавишу прибор переходит в режим прямоугольных координат. Работа в первых двух режимах съёмки может выполняться сразу после включения прибора, а работа в режиме прямоугольных координат требует предварительной подготовки: • выбирают основной режим съёмки; • на странице Р1 нажимают клавишу F4 КООРД для входа в экран Координаты; • клавишей J выбирают пункт Ориент ст и затем Коорд ст; • нажав клавишу F3 РЕДКТ, входят в режим редактирования и последовательно вводят значения координат станции (ХО, Y0, НО), высоту прибора (Выс И) и визирной цели (Выс Ц); при этом изменение показаний в нижней строке цифр получают с помощью клавиши FUNC; • по окончании набора нажимают клавишу F4 ДА - снова будет выведен экран Координаты; • трубу прибора наводят на начальное направление, выбирают пункт Уст ГУ, вводят ноль или значение дирекционного угла начального направления (например, значение 125° 16' 34" вводится как 125.1634), используя клавишу FUNC и J. Прибор готов к выполнению съёмки. Для съёмки наводят трубу на отражатель, установленный на снимаемой точке, клавишей ESC снова входят в экран Координаты, выбирают пункт Наблюдения - прибор начинает измерение расстояния и на табло выводятся значения трёх координат, вертикального и горизонтального углов. Такие действия повторяются на каждой снимаемой точке. Кроме координат, можно вывести на экран значения наклонного расстояния, горизонтального проложения, превышения, если клавишей ESC выйти на первую страницу (Р1) основного режима измерений. Результаты всех измерений могут быть записаны в накопитель информации. При сгущении опорных геодезических сетей и при съёмке кривых часто используют метод «свободной станции», т.е. свободно выбранной опорной точки, с которой видно несколько пунктов с известными координатами. При этом измерения выполняются «на себя». Типичным примером служит обратная засечка (угловая или линейно-угловая). В приборе предусмотрено автоматическое решение задачи с уведомлением о достаточности исходных данных для нахождения решения. Если исходных данных будет больше минимального необходимого числа, прибор выполни! уравнивание и выдаст сообщение о полученных средних квадратических погрешностях координат определяемой точки. Пример последовательности работы с тахеометром при решении обратной засечки по координатам трех точек. Клавишей FUNC находим страницу 2 (Р2), входим в меню, Обратная засечка, J, ХУН, J, нажимаем F3 РЕДАКТИРОВАНИЕ. Вводим координаты первой точки: X, У, Н, высоту отражателя (или нуль при работе в безотражательном режиме); клавишей со стрелкой -» переходим на следующий экран и аналогично вводим координаты второй точки; той же клавишей -» переходим на третий экран и вводим координаты третьей точки. Если считаем, что трёх точек достаточно, то нажимаем F4 Измерение, переводя прибор в режим измерений - основной режим работы. Число исходных точек может быть от 2 до 10. Визируем на первую исходную точку и нажимаем F1 РАССТ. На экран выводятся полярные координаты точки и предлагается ввести новую высоту отражателя, если это нужно. Нажимаем F4 ДА, визируем на вторую точку, F4 ДА; визируем на третью точку, F4 ДА. Как только измерений будет выполнено достаточно для решения задачи, над функциональными клавишами появятся надписи: F1 - Вычис, F2 - Редкт, F3 - НЕТ, F4 - ДА. Можно либо продолжить измерения, либо закончить. Нажав F1 или F4, запускаем блок вычислений и на экране появляются координаты определяемой точки и погрешности определения по осям X, У. Если снова нажать F4 ДА, то полученные координаты будут установлены в качестве координат станции при съёмке. Нажав ещё раз F4 ДА, выйдем на экран установки дирекционного угла направления на первую исходную точку. Нажав F3 НЕТ, возвратимся в основной режим съёмки без установки дирекционного угла. Для решения инженерно-геодезических задач особо интересны две встроенные функции: 1) определение высоты недоступного объекта (НО) и 2) определение недоступного расстояния (ОНР). Первую функцию удобно использовать, когда нельзя получить отражённый сигнал при измерениях без отражателя, например, при определении высоты подвеса провода (вертикальный габарит).
Рис. 2.26
Работу выполняют в такой последовательности (рис. 2.26): • устанавливают отражатель непосредственно под объектом, измеряют высоту отражателя V; • наводят прибор на отражатель и в основном режиме работы на странице PI нажимают клавишу Fl РАССТ - прибор измеряет расстояние и вычисляет горизонтальное проложение D = Scos v;; • ослабив закрепительный винт трубы, наводят трубу на провод; • клавишей FUNC переходят на вторую страницу (Р2) экрана, нажимают клавишу F1 МЕНЮ и выбирают пункт Высота НО; начинается вычисление превышения hi по формуле
для остановки измерений и вычислений нажимают клавишу F4 СТОП - на табло в строке Выс появляется значение превышения h,; • вычисляют значение высоты объекта над землёй h = h1 + V. Примечание: в приборах этой и других фирм (например, Trimble) с большей дальностью работы в безотражательном режиме и с более узким лучом, отражённый сигнал можно получить непосредственно от провода и решать данную задачу прямым способом, определяя отметку нужной точки на кабеле. Вторую функцию удобно применять при обмере элементов фасадов зданий (рис. 2.26). В этом случае измеряются только расстояния до двух точек, а все остальные элементы вычисляются. Работу выполняют в такой последовательности: • наводят трубу тахеометра на точку 1 (например, на верхнюю левую точку оконного проёма) и в основном режиме работы на странице Р1 экрана нажимают клавипгу F1 Раест - прибор измеряет расстояние Sj в безотража-тельном режиме, вычисляет • наводят трубу на точку 2 (например, на нижний правый угол оконного проёма); • клавишей FUNC переходят на третью страницу экрана (РЗ), нажимают клавишу Fl ОНР. Прибор измеряет расстояние S2 и на табло появляются записи: Определение HP S = D = h = где наклонная длина S соответствует диагонали проёма S; горизонтальное проложение D соответствует ширине проёма d; превышение h- высоте проёма h. Задача решается по следующим формулам: h2 = S2sinv2; D2 = S2cosv2;
Выход из режима ОНР - клавишей Esc. Более простые задачи решаются с помощью электронного тахеометра в безотражательном режиме элементарно. Например: - определение строительного подъема балки (рис. 2.27)
Строительный подъём f, или стрела изгиба балки в вертикальной плоскости, определяется по формуле
Для определения превышений используют режим тригонометрического нивелирования S, D, h. Тахеометр устанавливают в произвольной точке, с которой видны точки по концам и в середине балки. Так как величина подъёма всегда мала, то точность определения точки 2 в середине балки и, тем более, точек 1, 3 по краям балки может быть достаточно низка - порядка 1 м. Если стрелу изгиба нужно определять в динамике, т.е. под изменяющейся нагрузкой, то сначала наблюдают точки 1, 3, затем точку 2 в моменты изменения величины нагрузки, нажимая на клавишу F1 Расст.
2. Проверка вертикальности конструкции (рис. 2.28). Рис. 2.28
Невертикальность конструкции - это смещение точки 2 относительно точки 1 по двум взаимно перпендикулярным направлениям. При проверке вертикальности колонн устанавливают тахеометр в точке А по направлению, перпендикулярному ряду колонн. Это направление принимают в качестве оси X. В основном режиме измеряют наклонное расстояние S1 и, нажав клавишу F2 S, D, h, определяют горизонтальное проложение D1. Нажав клавишу F4 КООРД, переходят в координатный режим и задают координаты станции: ХА= -D1; YA= 0. В этом случае X1 = 0; Y1 = 0. Выполняют наблюдения на верхнюю точку 2. Прочитанные координаты будут прямо величинами Если конструкция В имеет переменное сечение, то в результаты измерений вводят поправки, определяемые по строительным чертежам. Тахеометры различных фирм обладают несколько разными возможностями, но все они — это высокопроизводительные, удобные и надежные приборы широкого спектра действия. Вместе с приёмниками сигналов спутниковых навигационных систем и совершенными программами обработки результатов измерений электронные тахеометры составляют линию, обеспечивающую любые потребности самых разнообразных отраслей строительного производства.
Ввод отметки точки
Войти в меню, выбрать Input RL, попадаем в экран редактирования. Клавиши с и d в этом режиме служат для прокрутки цифр 0...9, десятичной точки и знаков + и -. Каждую набранную цифру отметки нужно подтвердить клавишей ENTER.
Раздел 3. ОСНОВЫ ПРОМЫШЛЕННОЙ БЕЗОПАСНОСТИ В ГОРНОМ ДЕЛЕ
Принятие Федерального закона «О промышленной безопасности опасных производственных объектов» стало основой при формировании новой отрасли российского законодательства по промышленной безопасности, которая появилась в новой редакции общеправового классификатора отраслей законодательства в 1997 г. (Собрание законодательства Российской Федерации. 1997. №1. Ст. 119). Законодательство по промышленной безопасности занимает одно из важнейших мест среди таких отраслей права, как экологическая и пожарная безопасность, законодательство о санитарно-эпидемиологическом благополучии населения, законодательство по охране труда, защите населения и территории от чрезвычайных ситуаций природного и техногенного характера. Федеральный закон «О промышленной безопасности опасных производственных объектов» разрабатывался с учетом международного опыта регулирования отношений в данной области. Государства с развитой рыночной экономикой и страны ЕЭС успешно применяют на практике международные и национальные правовые акты, регулирующие отношения в области промышленной безопасности, к которым относятся Директива №82/501/ЕЭС «О предотвращении крупных промышленных аварий» (Директива Севезо), система актов CIMAH по безопасности в промышленности (Великобритания) и др. Принятие Федерального закона «О промышленной безопасности опасных производственных объектов» существенным образом изменило правовые отношения в области промышленной безопасности и потребовало разработки пакета подзаконных нормативных правовых актов, которые должны были раскрыть конкретные механизмы применения и использования тех или иных нормативных документов, направленных на снижение риска возникновения аварий при эксплуатации опасных объектов. При подготовке данного учебного пособия ставилась цель обеспечить широкий круг пользователей аналитическим, толковательным и справочным материалом, который позволил бы объективно представить требования Федерального закона «О промышленной безопасности опасных производственных объектов» к состоянию промышленной безопасности, как на строящихся, так и действующих производственных объектах. Приведённые в книге данные будут полезны при разработке мероприятий, направленных на предупреждение потенциальных аварий и катастроф, а также ликвидацию их последствий на опасных объектах. Резкий прогресс развития производства на всех уровнях деятельности человека привёл к возникновению и эксплуатации опасных производственных объектов, представляющих потенциальную опасность для здоровья обслуживающего персонала, жизни и здоровья людей, находящихся в пределах функционирования этих объектов, а также имущества и среде их обитания. На современном этапе развития промышленности остро стоит проблема организации работ по совершенствованию промышленной безопасности на опасных производственных объектах в целях недопустимости аварийных ситуаций при их эксплуатации. В законе «О промышленной безопасности опасных производственных объектов» определены следующие термины и понятия: 1. Промышленная безопасность опасных производственных объектов (далее – промышленная безопасность) – состояние защищённости жизненно важных интересов личности и общества от аварий на опасных производственных объектах и последствий указанных аварий. 2. Авария — разрушение сооружений и (или) технических устройств, применяемых на опасном производственном объекте, неконтролируемые взрыв и (или) выброс опасных веществ. 3. Инцидент – отказ или повреждение технических устройств, применяемых на опасном производственном объекте, отключение от режима технологического процесса, нарушение положений настоящего Федерального закона, других федеральных законов и иных нормативных правовых актов Российской Федерации, а также нормативных технических документов, устанавливающих правила ведения работ на опасном производственном объекте. 4. Гражданская ответственность — возникшая по закону обязанность возмещать вред, причиненный жизни, здоровью или имуществу других лиц и окружающей природной среде. 5. Идентификация опасных производственных объектов — отнесение объекта в составе организации к категории опасного производственного объекта и определение его типа в соответствии с требованиями Федерального закона «О промышленной безопасности опасных производственных объектов». 6. Лицензия — разрешение (право) на осуществление лицензируемого вида деятельности при обязательном соблюдении лицензионных требований и условий. 7. Опасные производственные объекты — предприятия или их цехи, участки, площадки, а также иные производственные объекты, на которых: · получаются, используются, перерабатываются, образуются, хранятся, транспортируются, уничтожаются опасные вещества (воспламеняющиеся, окисляющие, горючие, взрывчатые, токсичные, высоко-токсичные, вещества, представляющие опасность для окружающей среды); · используется оборудование, работающее под давлением более 0,07 МПа или при температуре нагрева воды более 115 градусов Цельсия; · используются стаци
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 2061; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.219.207.115 (0.02 с.) |



 ;
;  ;
; ; h=h1-h2;
; h=h1-h2; 


 ,
,  . Остаётся по теореме Пифагора вычислить вектор крена f.
. Остаётся по теореме Пифагора вычислить вектор крена f.


