
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Обработка журнала нивелированияСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
После выполнения нивелирования производят обработку журнала в следующем порядке: 1. Для выявления ошибок в вычислении превышений выполняют постраничный контроль. Для этого в конце страницы подсчитывают суммы задних отсчётов (∑a, графа 3), передних отсчётов (∑b, графа 4), превышений (∑ h, графа 6), средних превышений (∑hcp, графа 7), находят величины ∑ а - ∑ b и 1/2∑ h. Если в вычислениях нет ошибок, то ∑ а - ∑ b = ∑ h и 1/2∑h =∑hcp. Первое равенство должно выполняться точно, второе из-за округлений при вычислении средних превышений может выполняться с точностью 1...2 мм. 2. Вычисляют невязку в ходе где Нкон, Ннач - соответственно отметки конечной и начальной точек хода, задаваемые преподавателем. Для замкнутого хода fh =∑hср 3. Вычисляют допустимую невязку хода по формулам: доп или доп Вторая формула используется, если число станций на 1 км хода больше 15. 4. Если полученная невязка допустима, её распределяют с обратным знаком поровну во все превышения хода. Поправки δh (в целых миллиметрах) выписывают над средними превышениями, как показано в табл. 5.1. Сумма поправок должна точно равняться невязке с обратным знаком. 5. Вычисляют отметки связующих точек хода по формуле Hi+I = Hi + hcp + δh Отметку связующей точки записывают в журнале дважды: для первой и второй станции, затем для второй и третьей и т. д. 6. На станциях, с которых нивелировались промежуточные точки, вычисляют горизонт прибора ГП по формуле ГП = На + а, где На - отметка задней связующей точки на станции, а - отсчёт по чёрной стороне рейки на этой точке. Например: ГП, = 55,000 + 2,654 = 57,654 м ГП2 = 55,493 + 1,329 = 56,822 м. 7. Вычисляют отметки всех промежуточных точек по формуле Нс = ГП – с, где с - отсчёт по рейке на промежуточной точке. Например: Нс = 57,654 - 1,300 = 56,354 м Нд = 56,822 - 0,505 = 56,317 м. Журнал технического нивелирования
Современные цифровые геодезические приборы
Развитие микропроцессорной и вычислительной техники привело к широкому внедрению в производство цифровых приборов: электронных тахеометров, цифровых нивелиров, высокоточных приёмников сигналов навигационных спутников, геодезических сканеров. В связи с этим быстро развиваются цифровые технологии, разработаны мощные пакеты прикладных программ, позволяющие обрабатывать геодезические измерения, выполненные любыми геодезическими приборами и системами.
Электронные тахеометры Современное состояние науки и техники позволило по-другому подойти к традиционным вопросам геодезии. Столетиями господствовавшее направление: детальное изучение устройства приборов, их поверок и исследований, методики измерений, изучение теории математической обработки измерений - быстро уступает место принципиально новому подходу: 1.Прибор должен быть абсолютно надёжным, не требующим постоянных поверок и юстировок. Вместо этого должна проводиться ежегодная метрологическая (профилактическая) аттестация прибора. 2.Прибор должен быть высокоточным, не требующим применения сложной методики измерений. Отклонения осей от теоретической геометрической схемы должны автоматически учитываться в процессе работы. С высокой точностью должны определяться все три координаты точки. 3.Результаты измерений должны приводить к минимальным невязкам, не требующим строгой математической обработки. Такой подход определил появление электронного тахеометра, или общей измерительной станции (total station). В последние годы электронные тахеометры окончательно вытеснили традиционные оптические теодолиты и светодальномеры как отдельные приборы. Электронный тахеометр стал основным прибором для выполнения топографических съёмок, разбивочных работ, решения разнообразных инженерно геодезических задач. Трудно указать задачу, которая не могла бы решаться с помощью современного электронного тахеометра. Объёмы продаж электронных тахеометров неуклонно растут. Электронный тахеометр состоит из цифрового теодолита, цифрового светодальномера, мощного микропроцессора с набором прикладных программ, электронного накопителя информации, устройства связи с компьютером. Все ведущие приборостроительные фирмы мира выпускают электронные тахеометры: Sokkia, Nikon, Trimble, Leika. Уральский оптико-механический завод выпускает электронный тахеометр ЗТа-5. Выпускается целый спектр тахеометров, обладающих различной точностью измерения углов (1 - 7") и линий (1-5 мм), различными возможностями и условиями обслуживания. Конструкция тахеометров постоянно совершенствуется: • увеличивается мощность излучателя светодальномера, что позволяет измерять расстояния до 1200 м без установки на определяемой точке отражателя или использовать плёночные отражатели; • тахеометр снабжается двухосевыми компенсаторами, лазерным визиром, створоискатслем, алфавитно-цифровой клавиатурой, графическим дисплеем, цифровыми фотокамерами. Работа исполнителя (оператора такого прибора) сводится к визированию на цель (обычно - веху с отражателем) и нажатию кнопки отсчёта. Наиболее квалифицированным, знающим и понимающим местность, её рельеф и контурную нагрузку, должен быть человек, выбирающий место установки отражателя, т.е. бывший рабочий. Большую часть времени оператор тратит на приближённое наведение, перефокусировку трубы, точное наведение. Через несколько часов такой работы внимание оператора снижается, устают глаза, руки, ноги, спина, шея. Поэтому дальнейшее развитие конструкций тахеометров идёт по пути их роботизации, т.е. создания приборов: - с сервомоторами (простых); - со следящей системой (полуроботов); - с дистанционным управлением (роботов). Эти конструкции принципиально отличаются от любого отечественного прибора: их создатели стараются обеспечить комфорт и удобство эксплуатации, что прямо сказывается на производительности и качестве работы. 1.Тахеометр с сервомоторами. Прибор не имеет закрепительных винтов. Вместо наводящих винтов используются маховики управления сервомоторами. Чем быстрее оператор вращает маховик, тем быстрее поворачивается прибор. 2.Тахеометр со следящей системой. Эта система смонтирована в блоке зрительной трубы под объективом и способна принимать сигнал от излучателя, закреплённого на вехе вместе с призмой-отражателем (активный отражатель). Следящая система тахеометра удерживает прибор в состоянии наведения на отражатель. При перемещении вехи с отражателем сервомоторы разворачивают прибор в направлении на излучатель. При этом прибор удерживает только одну цель и не перемещается за более яркими объектами. Производительность работы с использованием такого прибора повышается примерно на 50%. Оператор только нажимает кнопку отсчета и подаёт команду на переход отражателя. 3.Тахеометр с дистанционным управлением отличается от предыдущей конструкции тем, что не требует оператора: сам наводится на отражатель, сам записывает отсчёты, сам подаёт команду на переход отражателя. Исполнитель работ один: он только устанавливает прибор на станции, ориентирует его, вводит исходные данные и далее перемещается с отражателем по точкам, подлежащим съёмке. Пока наибольшим спросом на отечественном рынке пользуются обычные электронные тахеометры. Заложенные в микропроцессор любого электронного тахеометра основные формулы следуют из рис. 2.1.
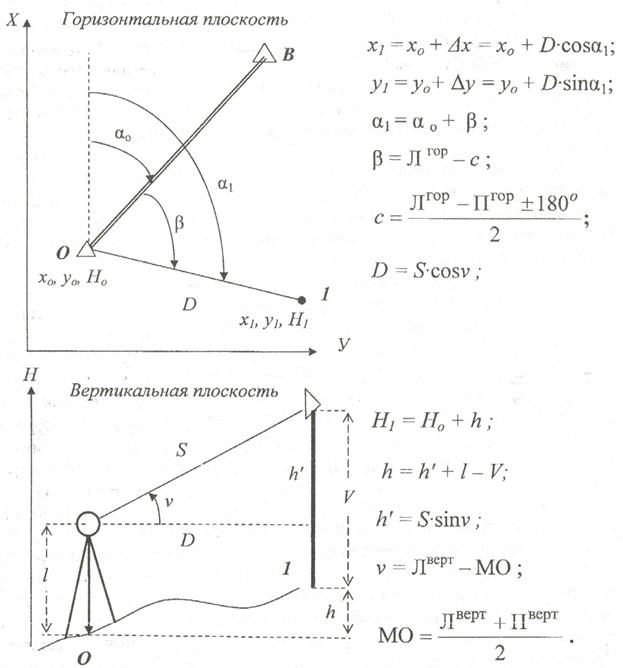
Рис. 2.24
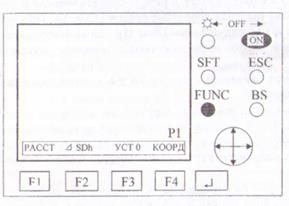
α0 и α1 – дирекционные углы исходной и определяемой сторон β, υ – горизонтальный и вертикальный углы на определяемую точку S – наклоння длина измеряемой линии, D – горизонтальное проложение h – превышение между исходной и определяемо точками h´ - превышение, вычисляемое по измеренному вертикальному углу l – высота прибора, V – высота визирной цели (отражателя на вехе) Лгор, Пгор, Лверт, Пверт – отсчеты по горизонтальному и вертикальному кругам. Рассмотрим принципиальное устройство такого прибора на примере электронного тахеометра SET-330R японской фирмы SOKKIA. Этот тахеометр полностью русифицирован, имеет двустороннее табло, лазерный указатель направления, точность измерения расстояний - 2 мм, точность измерения углов - 3", измеряет расстояния до ста метров без отражателя. При отключении прибора все показатели сохраняются. При топографической съёмке используют три режима работы прибора: • основной режим измерений - режим полярных координат; • режим тригонометрического нивелирования; • режим прямоугольных координат. Панель управления тахеометра снабжена клавишами, аналогичными клавиатуре компьютера. Это 12 функциональных клавиш F - по 4 на каждой из трёх рабочих страниц (PI, Р2, РЗ), ENTER, стрелки для передвижения по экрану во все четыре стороны, клавиша BS (удаление символа слева), FTJNC (выбор нужной страницы), ESC (листание окон табло назад), SFT (Shift - переключение регистров и выбор типа отражателя), ON (включение прибора), ft (подсветка экрана и включение/выключение лазерного указателя). Одновременное нажатие на клавиши ON и ft выключает прибор. На рис. 2.25 показан вид панели управления, где надписи функциональных клавиш на табло соответствуют первой рабочей странице (Р1).
Рис. 2.25
После включения и горизонтирования прибора на табло устанавливается основной режим измерений - режим полярных координат. Слева высвечиваются: надпись «Измерения», значения наклонного расстояния, вертикального и горизонтального углов. Справа будут показаны: постоянная стандартной призмы (если измерения велись на отражатель), поправка за метеоусловия (ррm - в мм/км), тип используемого отражателя (смена типа отражателя клавишей SFT) и остаточный заряд аккумулятора, указатель включения двухосевого компенсатора, номер страницы режима измерений (PI, Р2, Р3).
В нижней строке табло на первой странице (Р1) в основном режиме: • над клавишей F1 будет надпись РАССТ - при нажатии на эту клавишу прибор измеряет расстояние в заданном режиме, вычисляет результаты и выдаёт на табло значения измеренного наклонного расстояния S, вертикального ВУ и горизонтального ГУ углов; • над клавишей F2 будет надпись S D h — при нажатии на эту клавишу прибор переходит в режим тригонометрического нивелирования, а на табло отражаются значения наклонной длины S, горизонтального проложения D и превышения А (над уровнем горизонтальной оси вращения трубы, что соответствует h' на рис. 2.1); • над клавишей ГЗ будет надпись УСТ 0 (ориентирование лимба) -при нажатии на эту клавишу надпись УСТ 0 мигает; при повторном нажатии на клавишу F3 происходит обнуление отсчёта по горизонтальному кругу, т.е. ориентирование лимба; • над клавишей F4 будет надпись КООРД - при нажатии на эту клавишу прибор переходит в режим прямоугольных координат. Работа в первых двух режимах съёмки может выполняться сразу после включения прибора, а работа в режиме прямоугольных координат требует предварительной подготовки: • выбирают основной режим съёмки; • на странице Р1 нажимают клавишу F4 КООРД для входа в экран Координаты; • клавишей J выбирают пункт Ориент ст и затем Коорд ст; • нажав клавишу F3 РЕДКТ, входят в режим редактирования и последовательно вводят значения координат станции (ХО, Y0, НО), высоту прибора (Выс И) и визирной цели (Выс Ц); при этом изменение показаний в нижней строке цифр получают с помощью клавиши FUNC; • по окончании набора нажимают клавишу F4 ДА - снова будет выведен экран Координаты; • трубу прибора наводят на начальное направление, выбирают пункт Уст ГУ, вводят ноль или значение дирекционного угла начального направления (например, значение 125° 16' 34" вводится как 125.1634), используя клавишу FUNC и J. Прибор готов к выполнению съёмки. Для съёмки наводят трубу на отражатель, установленный на снимаемой точке, клавишей ESC снова входят в экран Координаты, выбирают пункт Наблюдения - прибор начинает измерение расстояния и на табло выводятся значения трёх координат, вертикального и горизонтального углов. Такие действия повторяются на каждой снимаемой точке. Кроме координат, можно вывести на экран значения наклонного расстояния, горизонтального проложения, превышения, если клавишей ESC выйти на первую страницу (Р1) основного режима измерений. Результаты всех измерений могут быть записаны в накопитель информации. При сгущении опорных геодезических сетей и при съёмке кривых часто используют метод «свободной станции», т.е. свободно выбранной опорной точки, с которой видно несколько пунктов с известными координатами. При этом измерения выполняются «на себя». Типичным примером служит обратная засечка (угловая или линейно-угловая). В приборе предусмотрено автоматическое решение задачи с уведомлением о достаточности исходных данных для нахождения решения. Если исходных данных будет больше минимального необходимого числа, прибор выполни! уравнивание и выдаст сообщение о полученных средних квадратических погрешностях координат определяемой точки. Пример последовательности работы с тахеометром при решении обратной засечки по координатам трех точек. Клавишей FUNC находим страницу 2 (Р2), входим в меню, Обратная засечка, J, ХУН, J, нажимаем F3 РЕДАКТИРОВАНИЕ. Вводим координаты первой точки: X, У, Н, высоту отражателя (или нуль при работе в безотражательном режиме); клавишей со стрелкой -» переходим на следующий экран и аналогично вводим координаты второй точки; той же клавишей -» переходим на третий экран и вводим координаты третьей точки. Если считаем, что трёх точек достаточно, то нажимаем F4 Измерение, переводя прибор в режим измерений - основной режим работы. Число исходных точек может быть от 2 до 10. Визируем на первую исходную точку и нажимаем F1 РАССТ. На экран выводятся полярные координаты точки и предлагается ввести новую высоту отражателя, если это нужно. Нажимаем F4 ДА, визируем на вторую точку, F4 ДА; визируем на третью точку, F4 ДА. Как только измерений будет выполнено достаточно для решения задачи, над функциональными клавишами появятся надписи: F1 - Вычис, F2 - Редкт, F3 - НЕТ, F4 - ДА. Можно либо продолжить измерения, либо закончить. Нажав F1 или F4, запускаем блок вычислений и на экране появляются координаты определяемой точки и погрешности определения по осям X, У. Если снова нажать F4 ДА, то полученные координаты будут установлены в качестве координат станции при съёмке. Нажав ещё раз F4 ДА, выйдем на экран установки дирекционного угла направления на первую исходную точку. Нажав F3 НЕТ, возвратимся в основной режим съёмки без установки дирекционного угла. Для решения инженерно-геодезических задач особо интересны две встроенные функции: 1) определение высоты недоступного объекта (НО) и 2) определение недоступного расстояния (ОНР). Первую функцию удобно использовать, когда нельзя получить отражённый сигнал при измерениях без отражателя, например, при определении высоты подвеса провода (вертикальный габарит).
Рис. 2.26
Работу выполняют в такой последовательности (рис. 2.26): • устанавливают отражатель непосредственно под объектом, измеряют высоту отражателя V; • наводят прибор на отражатель и в основном режиме работы на странице PI нажимают клавишу Fl РАССТ - прибор измеряет расстояние и вычисляет горизонтальное проложение D = Scos v;; • ослабив закрепительный винт трубы, наводят трубу на провод; • клавишей FUNC переходят на вторую страницу (Р2) экрана, нажимают клавишу F1 МЕНЮ и выбирают пункт Высота НО; начинается вычисление превышения hi по формуле
для остановки измерений и вычислений нажимают клавишу F4 СТОП - на табло в строке Выс появляется значение превышения h,; • вычисляют значение высоты объекта над землёй h = h1 + V. Примечание: в приборах этой и других фирм (например, Trimble) с большей дальностью работы в безотражательном режиме и с более узким лучом, отражённый сигнал можно получить непосредственно от провода и решать данную задачу прямым способом, определяя отметку нужной точки на кабеле. Вторую функцию удобно применять при обмере элементов фасадов зданий (рис. 2.26). В этом случае измеряются только расстояния до двух точек, а все остальные элементы вычисляются. Работу выполняют в такой последовательности: • наводят трубу тахеометра на точку 1 (например, на верхнюю левую точку оконного проёма) и в основном режиме работы на странице Р1 экрана нажимают клавипгу F1 Раест - прибор измеряет расстояние Sj в безотража-тельном режиме, вычисляет • наводят трубу на точку 2 (например, на нижний правый угол оконного проёма); • клавишей FUNC переходят на третью страницу экрана (РЗ), нажимают клавишу Fl ОНР. Прибор измеряет расстояние S2 и на табло появляются записи: Определение HP S = D = h = где наклонная длина S соответствует диагонали проёма S; горизонтальное проложение D соответствует ширине проёма d; превышение h- высоте проёма h. Задача решается по следующим формулам: h2 = S2sinv2; D2 = S2cosv2;
Выход из режима ОНР - клавишей Esc. Более простые задачи решаются с помощью электронного тахеометра в безотражательном режиме элементарно. Например: - определение строительного подъема балки (рис. 2.27)
Строительный подъём f, или стрела изгиба балки в вертикальной плоскости, определяется по формуле
Для определения превышений используют режим тригонометрического нивелирования S, D, h. Тахеометр устанавливают в произвольной точке, с которой видны точки по концам и в середине балки. Так как величина подъёма всегда мала, то точность определения точки 2 в середине балки и, тем более, точек 1, 3 по краям балки может быть достаточно низка - порядка 1 м. Если стрелу изгиба нужно определять в динамике, т.е. под изменяющейся нагрузкой, то сначала наблюдают точки 1, 3, затем точку 2 в моменты изменения величины нагрузки, нажимая на клавишу F1 Расст.
2. Проверка вертикальности конструкции (рис. 2.28). Рис. 2.28
Невертикальность конструкции - это смещение точки 2 относительно точки 1 по двум взаимно перпендикулярным направлениям. При проверке вертикальности колонн устанавливают тахеометр в точке А по направлению, перпендикулярному ряду колонн. Это направление принимают в качестве оси X. В основном режиме измеряют наклонное расстояние S1 и, нажав клавишу F2 S, D, h, определяют горизонтальное проложение D1. Нажав клавишу F4 КООРД, переходят в координатный режим и задают координаты станции: ХА= -D1; YA= 0. В этом случае X1 = 0; Y1 = 0. Выполняют наблюдения на верхнюю точку 2. Прочитанные координаты будут прямо величинами Если конструкция В имеет переменное сечение, то в результаты измерений вводят поправки, определяемые по строительным чертежам. Тахеометры различных фирм обладают несколько разными возможностями, но все они — это высокопроизводительные, удобные и надежные приборы широкого спектра действия. Вместе с приёмниками сигналов спутниковых навигационных систем и совершенными программами обработки результатов измерений электронные тахеометры составляют линию, обеспечивающую любые потребности самых разнообразных отраслей строительного производства.
|
||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 11085; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.18.135 (0.014 с.) |


 , мм, где L – длина хода в километра
, мм, где L – длина хода в километра , мм, где п - число станций в ходе.
, мм, где п - число станций в ходе.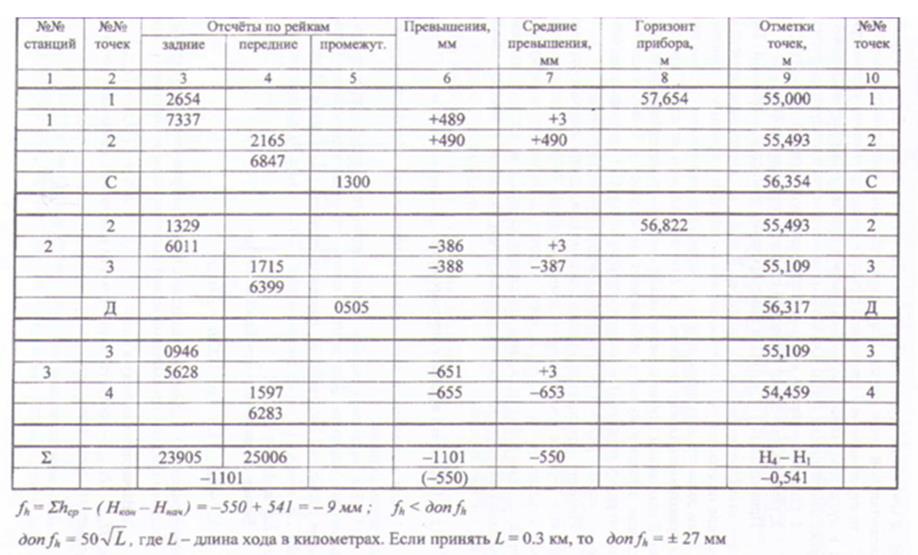


 ;
;  ;
; ; h=h1-h2;
; h=h1-h2; 


 ,
,  . Остаётся по теореме Пифагора вычислить вектор крена f.
. Остаётся по теореме Пифагора вычислить вектор крена f.


