
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Динамика:Законы Ньютона; силы, виды сил и их разложение, масса. Центр масс системы материальных точек.Содержание книги
Поиск на нашем сайте
Й билет
Системой отсчета в физике называют совокупность тела отсчета, системыкоординат, связанной с телом отсчета, и часы или иной прибор для отсчета времени. Ско́рость — векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы отсчета Тангенциальное (касательное) ускорение – это составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке траектории движения. Тангенциальное ускорение характеризует изменение скорости по модулю при криволинейном движении. Нормальное ускорение – это составляющая вектора ускорения, направленная вдоль нормали к траектории движения в данной точке на траектории движения тела. То есть вектор нормального ускорения перпендикулярен линейной скорости движения (см. рис. 1.10). Нормальное ускорение характеризует изменение скорости по направлению и обозначается буквой n. Полное ускорение при криволинейном движении складывается из тангенциального и нормального ускорений по правилу сложения векторов и определяется формулой:
Пройденный путь l равен длине дуги траектории, пройденной телом за некоторое время t.
2. Виды движения (определения, формулы и графики) 1) Равномерное движение Равномерное движение материальной точки — это движение, при котором величина скорости точки остаётся неизменной. Расстояние, пройденное точкой за время
Зависимость проекции скорости тела от времени при равномерном прямолинейном движении
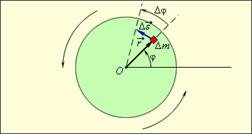
2) Вращение Для кинематического описания вращения твердого тела удобно использовать угловые величины: угловое перемещение Δϕ, угловую скорость ω
и угловое ускорениеε
При вращении твердого тела относительно неподвижной оси все его точки движутся с одинаковыми угловыми скоростями и одинаковыми угловыми ускорениями.
При малых угловых перемещениях Δφ модуль вектора ∆S линейного перемещения некоторого элемента массы Δ m вращающегося твердого тела выражается соотношением:
где r – модуль радиус-вектора r υ = r ω, a = a τ = r ε.
3)Равнопеременное движение - касательное ускорение постоянно
Движение называется равноускоренным при а↑↑ν и равнозамедленным при а↑↓ν Так как координата тела в любой момент времени определяется суммой начальной координаты и проекции перемещения, то уравнение движения тела будет выглядеть следующим образом:
4)Равнопеременное вращение Вращение называется равнопеременным, если угловое ускорение тела в процессе движения остается постоянным по модулю и направлению
Чтобы найти закон изменения угловой скорости в этом случае, проинтегрируем левую часть равенства
закон равнопеременного вращения:
Касательное ускорение:
Закон сохранения импульса
Выражение (2.9) представляет собой закон сохранения импульса: импульс замкнутой системы тел с течением времени не изменяется.
Другими словами, импульс системы равен произведению массы системы на скорость ее центра инерции.
или где Й билет Моментом импульса материальной точки относительно некоторой точки О называется вектор
Направление момента импульса определяется по правилу правого винта (вектора Момент импульса системы материальных точек равен векторной сумме моментов импульсов отдельных материальных точек системы или векторному произведению радиус-вектора центра масс системы на импульс ее центра масс
Изотропность пространства (осевая симметрия пространства) приводит к закону сохранения момента импульса: в замкнутых системах момент импульса сохраняется.
где mi – масса i- й точки;
Мгновенное значение углового ускорения Поэтому основной закон динамики вращательного движения твердого тела формулируется так: “Импульс момента силы
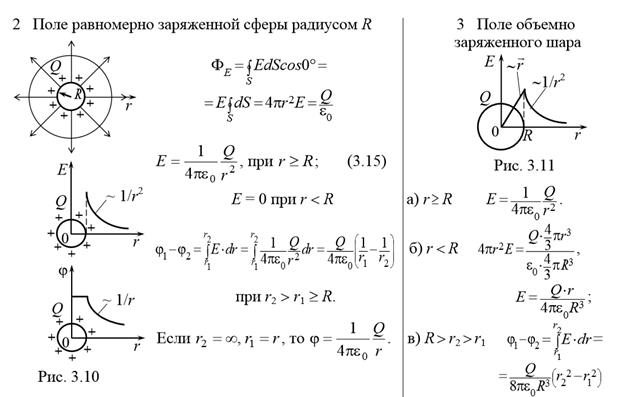
Электростатическое поле. Поле точечного заряда (напряженность, потенциал, работа по переносу заряда в эл. поле, графическое представление поля). Закон Кулона. Принцип суперпозиции электрических полей Электрическое поле — пространство, обладающее свойством действовать с силой на электрический заряд, помещённый в это поле. Напряженность электрического поля E=F/Q где: F — сила, действующая на точечный положительный заряд Q, помещенный в данную точку поля. Сила, действующая на точечный заряд Q, помещенный в электрическое поле: F=QE Поток вектора напряженности Е электрического поля: а) через произвольную поверхность S, помещенную в неоднородное поле,
где: a — угол между вектором напряженности Е и нормалью n к элементу поверхности; dS — площадь элемента поверхности; En — проекция вектора напряженности на нормаль; б) через плоскую поверхность, помещенную в однородное электрическое поле, ФE=ЕScosa Поток вектора напряженности Е через замкнутую поверхность:
где интегрирование ведется по всей поверхности. Силовые линии (линии напряженности) - непрерывные (воображаемые) линии вектор напряженности касателен к каждой точке которых. Способ описания с помощью силовых линий введен Фарадеем. Свойства: 1. Начинаются на положительных и заканчиваются на отрицательных зарядах. 2. Не пересекаются. 3. Густота линий тем больше, чем больше напряженность. Т.е. напряженность поля прямо пропорциональна количеству силовых линий, проходящих через единицу площади поверхности. 4. Можно договориться изображать поля так, что количество проведенных линий пропорционально величине заряда.
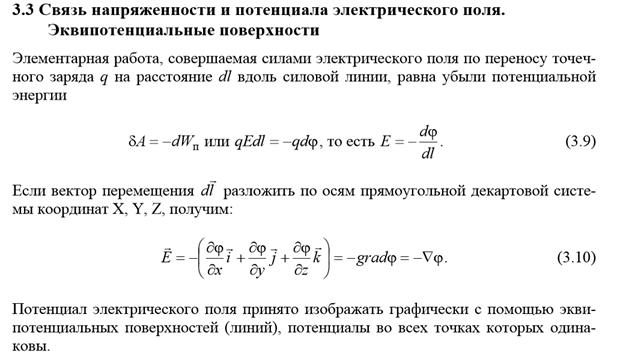
Потенциал электрического поля есть величина, равная отношению потенциальной энергии точечного положительного заряда, помещенную в данную точку поля, к этому заряду; j=П/Q или потенциал электрического поля есть величина, равная отношению работы сил поля по перемещению точечного положительного заряда из данной точки поля в бесконечность к этому заряду: j=A/Q Потенциал электрического поля в бесконечности условно принят равным нулю. Работа, совершаемая электрическим полем при перемещении точечного заряда Q из одной точки поля, имеющей потенциал j1, в другую, имеющую потенциал j2, A=Q(j1—j2)
где: El — проекция вектора напряженности Е на направление перемещения; dl — перемещение. В случае однородного поля последняя формула принимает вид A=QElcosa, где: l — перемещение; a — угол между направлениями вектора Е и перемещения l. Закон Кулона. Модуль силы взаимодействия двух точечных зарядов в вакууме прямо пропорционален произведению модулей этих зарядов и обратно пропорционален квадрату расстояния между ними.
где: F — сила взаимодействия двух точечных зарядов Q1, и Q2; r — расстояние между зарядами; e — диэлектрическая проницаемость среды; e0 — электрическая постоянная:
Если поле в некоторой точке пространства создаётся отдельными точечными зарядами, то напряжённость результирующего поля Е равна векторной сумме напряженностей складываемых полей
Это правило получило название принципа суперпозиции электрических полей- результат воздействия на частицу нескольких внешних сил есть векторная сумма воздействия этих сил.. Подчеркнем ещё раз, что справедливость этого принципа подтверждена экспериментально. 26. Циркуляция вектора напряженности электрического поля. Связь напряженности и потенциала эл. поля
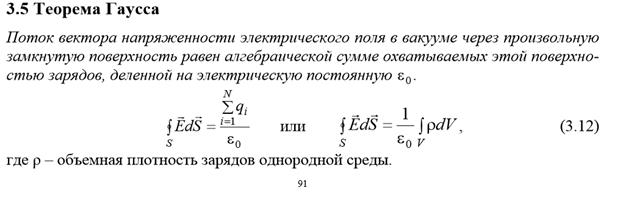
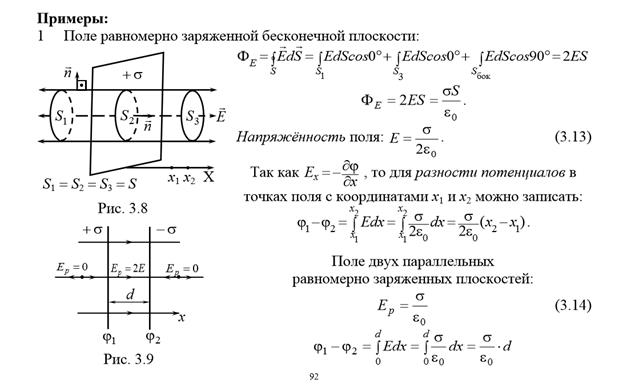
27. Теорема Гаусса для электрического поля и примеры её применения
28. Поле диполя. Диполь в однородном и неоднородном электрическом поле
Законы Ома. Закон Джоуля-Ленца в дифференциальноё форме-Мощность тепла, выделяемого в единице объёма среды при протекании постоянного электрического тока, пропорциональна произведению плотности электрического тока на величину напряженности электрического поля
Электрический ток в вакууме
Под термоэлектронной эмиссией следует понимать процесс испускания электронов нагретыми телами, обычно в вакуум или газовую среду. Чтобы электрон мог выйти из металла за его пределы, должна быть совершена определенная работа А против этих сил, которая получила название работа выхода электрона из металла. Aвых = eφ Ток насыщения характеризует эмиссионную способность катода, которая зависит от природы катода и его температуры. Он растёт с повышением температуры катода. Зависимость тока насыщения от температуры катода выражается формулой Ричардсона-Дешмена:
Эффект Холла. Эффект Холла - это возникновение поперечной разности потенциалов при пропускании тока через металлическую или полупроводниковую пластинку, помещенную в магнитное поле, таким образом, чтобы вектор индукции магнитного поля (
42. Закон Био-Савара-Лапласа и примеры его применения. Формулировка закона Био Савара Лапласа имеет вид: При прохождении постоянного тока по замкнутому контуру, находящемуся в вакууме, для точки, отстоящей на расстоянии r0, от контура магнитная индукция будет иметь вид.
43. Закон полного тока для магнитного поля в вакууме и примеры его применения. Вихревой характер магнитных полей.
Вихревые токи (токи Фуко).
Й билет
Системой отсчета в физике называют совокупность тела отсчета, системыкоординат, связанной с телом отсчета, и часы или иной прибор для отсчета времени. Ско́рость — векторная физическая величина, характеризующая быстроту перемещения и направление движения материальной точки относительно выбранной системы отсчета Тангенциальное (касательное) ускорение – это составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке траектории движения. Тангенциальное ускорение характеризует изменение скорости по модулю при криволинейном движении. Нормальное ускорение – это составляющая вектора ускорения, направленная вдоль нормали к траектории движения в данной точке на траектории движения тела. То есть вектор нормального ускорения перпендикулярен линейной скорости движения (см. рис. 1.10). Нормальное ускорение характеризует изменение скорости по направлению и обозначается буквой n. Полное ускорение при криволинейном движении складывается из тангенциального и нормального ускорений по правилу сложения векторов и определяется формулой:
Пройденный путь l равен длине дуги траектории, пройденной телом за некоторое время t.
2. Виды движения (определения, формулы и графики) 1) Равномерное движение Равномерное движение материальной точки — это движение, при котором величина скорости точки остаётся неизменной. Расстояние, пройденное точкой за время
Зависимость проекции скорости тела от времени при равномерном прямолинейном движении
2) Вращение Для кинематического описания вращения твердого тела удобно использовать угловые величины: угловое перемещение Δϕ, угловую скорость ω
и угловое ускорениеε
При вращении твердого тела относительно неподвижной оси все его точки движутся с одинаковыми угловыми скоростями и одинаковыми угловыми ускорениями.
При малых угловых перемещениях Δφ модуль вектора ∆S линейного перемещения некоторого элемента массы Δ m вращающегося твердого тела выражается соотношением:
где r – модуль радиус-вектора r υ = r ω, a = a τ = r ε.
3)Равнопеременное движение - касательное ускорение постоянно
Движение называется равноускоренным при а↑↑ν и равнозамедленным при а↑↓ν Так как координата тела в любой момент времени определяется суммой начальной координаты и проекции перемещения, то уравнение движения тела будет выглядеть следующим образом:
4)Равнопеременное вращение Вращение называется равнопеременным, если угловое ускорение тела в процессе движения остается постоянным по модулю и направлению
Чтобы найти закон изменения угловой скорости в этом случае, проинтегрируем левую часть равенства
закон равнопеременного вращения:
Касательное ускорение:
Динамика:Законы Ньютона; силы, виды сил и их разложение, масса. Центр масс системы материальных точек. Динамикой называют раздел механики, в котором изучают различные виды механических движений с учетом взаимодействия тел между собой. Основы динамики составляют три закона Ньютона, являющиеся результатом обобщения наблюдений и опытов в области механических явлений, которые были известны еще до Ньютона и осуществлены самим Ньютоном. Законы динамики Ньютона (иначе называемой классической динамикой) имеют ограниченную область применимости. Они справедливы для макроскопических тел, движущихся со скоростями, много меньшими, чем скорость света в вакууме.Динамика оперирует такими понятиями, как масса,сила, импульс, момент импульса, энергия.. К выводу о существовании явления инерции впервые пришел Галилей, а затем Ньютон. Этот вывод формулируется в виде первого закона Ньютона (закона инерции): существуют такие системы отсчета, относительно которых тело (материальная точка) при отсутствии на нею внешних воздействий (или при их взаимной компенсации) сохраняет состояние покоя или равномерного прямолинейного движения. Системы отсчета, в которых выполняется первый закон Ньютона, называют инерциальными. Следовательно, инерциальными являются такие системы отсчета, относительно которых материальная точка при отсутствии на нее внешних воздействий или их взаимной компенсации покоится или движется равномерно и прямолинейно. Второй закон Ньютона — дифференциальный закон механического движения, описывающий зависимость ускорения тела от равнодействующей всех приложенных к телу сил и массы тела.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-06; просмотров: 443; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.115 (0.015 с.) |


 , задаётся в этом случае формулой
, задаётся в этом случае формулой  .
.
 — начальная координата точки,
— начальная координата точки,  — проекция вектора скорости на координатную ось
— проекция вектора скорости на координатную ось







 =
=  t
t
 в пределах от
в пределах от  до
до  , а правую часть от 0 до t:
, а правую часть от 0 до t:




 представляет собой импульс всей системы. Таким образом,
представляет собой импульс всей системы. Таким образом,  или
или (2.9)
(2.9)


 масса системы.
масса системы.
 (2.10)
(2.10)

 (2.11)
(2.11) ускорение центра масс.
ускорение центра масс. , равный векторному произведению радиус-вектора материальной точки относительно точки О на импульс материальной точки
, равный векторному произведению радиус-вектора материальной точки относительно точки О на импульс материальной точки Модуль момента импульса
Модуль момента импульса
 и
и  составляют правую тройку векторов).
составляют правую тройку векторов). Величина момента импульса твердого тела относительно оси вращения
Величина момента импульса твердого тела относительно оси вращения где
где  - момент инерции тела относительно оси z, w - угловая скорость тела.
- момент инерции тела относительно оси z, w - угловая скорость тела. Основной закон динамики вращательного движения можно получить из второго закона Ньютона для поступательного движения твердого тела
Основной закон динамики вращательного движения можно получить из второго закона Ньютона для поступательного движения твердого тела


 – угловое ускорение; ri – ее расстояние до оси вращения.
– угловое ускорение; ri – ее расстояние до оси вращения.
 – момент инерции i -й материальной точки.
– момент инерции i -й материальной точки.

 , есть первая производная угловой скорости
, есть первая производная угловой скорости  по времени
по времени  , то есть
, то есть
 или
или  , где
, где  – импульс момента силы – это произведение момента силы
– импульс момента силы – это произведение момента силы  на промежуток времени
на промежуток времени 
 – изменение момента импульса тела,
– изменение момента импульса тела,  – момент импульса тела есть произведение момента инерции J на угловую скорость
– момент импульса тела есть произведение момента инерции J на угловую скорость  , а
, а  есть
есть  .
. , действующий на вращательное тело, равен изменению его момента импульса
, действующий на вращательное тело, равен изменению его момента импульса  ”:
”: или
или 
 или
или 












 Выделим в проводнике элементарный цилиндрический объём dV=dSdℓ (ось цилиндра совпадает с направлением тока(рис.13., сопротивление которого
Выделим в проводнике элементарный цилиндрический объём dV=dSdℓ (ось цилиндра совпадает с направлением тока(рис.13., сопротивление которого  . По закону Джоуля-Ленца, за время в этом объёме выделится теплота
. По закону Джоуля-Ленца, за время в этом объёме выделится теплота  Количество теплоты, выделившееся за единицу времени в единице объёма, называется удельной тепловой мощностью тока. Она равна ω= ρ∙j2 Используя дифференциальную форму закона Ома (j = γE) и соотношение
Количество теплоты, выделившееся за единицу времени в единице объёма, называется удельной тепловой мощностью тока. Она равна ω= ρ∙j2 Используя дифференциальную форму закона Ома (j = γE) и соотношение  , получим ω= j∙E=γ∙E2
, получим ω= j∙E=γ∙E2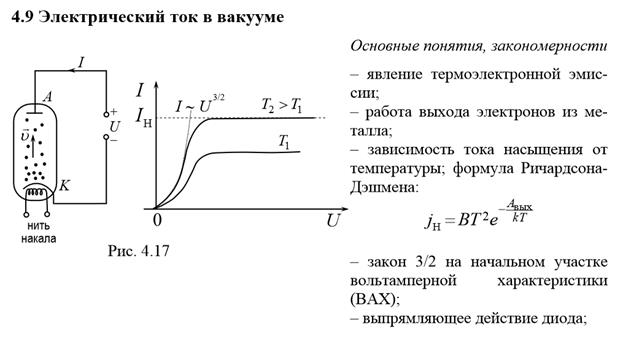
 , (4)где А=6,02·105 А/м2К2 - постоянная, одинаковая почти для всех металлов,
, (4)где А=6,02·105 А/м2К2 - постоянная, одинаковая почти для всех металлов,  - площадь поверхности катода.
- площадь поверхности катода. ) былонаправлено перпендикулярно вектору плотности тока (
) былонаправлено перпендикулярно вектору плотности тока ( ).C помощью эффекта Холла (1879 г.) можно измерить зависимость плотности тока
).C помощью эффекта Холла (1879 г.) можно измерить зависимость плотности тока  от концентрации свободных электронов.
от концентрации свободных электронов.








 где
где  — ускорение тела,
— ускорение тела,  — силы, приложенные к материальной точке, а
— силы, приложенные к материальной точке, а  — её масса, или
— её масса, или  Второй закона Ньютона можно также сформулировать с использованием понятия импульса: В инерциальных системах отсчёта производная импульса материальной точки по времени равна действующей на него силе[4].
Второй закона Ньютона можно также сформулировать с использованием понятия импульса: В инерциальных системах отсчёта производная импульса материальной точки по времени равна действующей на него силе[4].  где
где  — импульс (количество движения) точки,
— импульс (количество движения) точки,  — её скорость, а
— её скорость, а  3-й закон ньютона: Материальные точки взаимодействуют друг с другом силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению:
3-й закон ньютона: Материальные точки взаимодействуют друг с другом силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению:  Знак «минус» выражает здесь тот опытный факт, что ускорения взаимодействующих тел всегда направлены в противоположные стороны.
Знак «минус» выражает здесь тот опытный факт, что ускорения взаимодействующих тел всегда направлены в противоположные стороны.


