
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Предмет и задачи автоматики, статические и динамические системы, структура систем автоматического управления.Стр 1 из 12Следующая ⇒
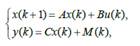
Предмет и задачи автоматики, статические и динамические системы, структура систем автоматического управления. Предметом ТАУ являются свойства моделей систем автоматики, которые представлены ДУ, а также их различными преобразованиями и интерпретациями. Объект управления – техническое устройство (часть окружающего мира) или процесс, поведение которого нас не устраивает по каким-либо причинам. Управление – процесс воздействия на объект управления с целью изменения его поведения нужным образом. Регулирование – частный случай управления, целью которого является приведение объекта к заданному состоянию. Система – совокупность элементов, объединенных общим режимом функционирования. При этом элементом можно называть любое техническое устройство. Динамическая система - система, процессы в которой изменяются с течением времени в силу собственных свойств. Система автоматического управления (САУ) – динамическая система, которая работает без участия человека. (автоматизированная – с участием человека) Теория автоматического управления (ТАУ) – научно-техническая дисциплина, в рамках которой изучаются свойства систем автоматического управления, разрабатываются принципы расчета и построения таких систем. Основными элементами САУ являются: · объект управления (ОУ); · управляющее устройство или регулятор (Р), который сравнивает выход управляемого объекта с желаемым и в зависимости от результата вырабатывает управляющий сигнал на объект.
Для того чтобы управлять реальной физической переменной (выходом объекта управления), ее необходимо измерять с помощью специального устройства, которое называется датчиком (Д). Измеренное значение выхода сравнивается с заданием и поступает на регулятор, вырабатывающий сигнал управления на объект. Рассмотрим подробнее объект управления (рис. 1.3) и выделим характеризующие его переменные. К таким переменным относятся: • управляющие воздействия u1,…, um – это такие переменные, с помощью которых можно влиять на поведение объекта; • выходные переменные y1,…, yp – доступные измерению величины, которые отражают реакцию объекта на управляющие воздействия; чаще всего р = m; • переменные состояния x1,…, xn – внутренние и часто недоступные измерению переменные, которые определяют состояние объекта в каждый момент времени, причем n >=m;
• возмущающие воздействия M1,…, Ml – отражают случайные воздействия окружающей среды на объект управления и обычно недоступны измерению. Требование подавления их влияния приводит к необходимости создавать системы автоматического управления. В зависимости от числа входных и выходных переменных выделяют: • одноканальные объекты (или системы) – объекты, в которых есть только одна выходная переменная (p=1); • многоканальные (многосвязные, многомерные, взаимосвязанные) объекты (или системы) – объекты, в которых число выходных переменных больше единицы (p>1).
Переходная характеристика, импульсная функция, передаточная функция. Переходная характеристика Эта динамическая характеристика используется для описания одноканальных объектов Переходной характеристикой (переходной функцией) h (t) называется реакция системы на единичное ступенчатое входное воздействие u(t-
Здесь – Зная переходную характеристику, можно вычислить реакцию системы на произвольное входное воздействие с помощью интеграла свертки
Импульсная переходная функция g(t) представляет собой реакцию на входное воздействие типа единичной импульсной функции при нулевых начальных условиях. Такое входное воздействие математически отражает дельта-функция, которая обладает следующими свойствами: Импульсная переходная функция позволяет вычислить реакцию системы на произвольное входное воздействие при нулевых начальных условиях по выражению:
Переходная характеристика и импульсная переходная функция однозначно связаны между собой соотношениями: Эти уравнения позволяют при одной известной характеристике определить вторую. Передаточная функция Наряду с обыкновенными дифференциальными уравнениями в теории автоматического управления используются различные их преобразования. Для линейных систем дифференциальные уравнения удобно представлять в символической форме с применением оператора дифференцирования: p =
Для многоканальных систем общего вида:
Чаще всего передаточные функции применяются для описания одноканальных систем вида С использованием оператора дифференцирования p запишем это уравнение в символической форме и найдем передаточную функцию как отношение изображений выходной величины ко входной:
Передаточные функции динамических систем:
Синтез систем автоматического управления. Метод пропорционально –интегрально - дифференциального (ПИД) регулирования. Уравнение непрерывного ПИД - регулятора. Структурная схема замкнутой системы с ПИД- регулятором. Задача синтеза Объект управления, для которого будем рассматривать синтез цифрового регулятора, описывается системой разностных уравнений
где M (k) – возмущение, приложенное к выходу объекта, что при синтезе является наиболее неблагоприятным случаем. После окончания переходного процесса выход объекта должен повторять входное задающее воздействие
В некоторых системах допускается воспроизводить входное задающее воздействие с ошибкой, но величина ошибки должна быть не больше заданной
Кроме требований статики (7.40), (7.41), предъявляются требования и к динамике системы. Время переходного процесса должно быть не более заданного:
Вид (качество) переходного процесса должен соответствовать предписанному, при этом часто задается величина перерегулирования
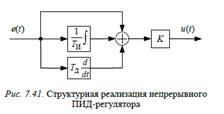
По заданным требованиям к системе необходимо определить структуру и параметры регулятора. До начала процедуры синтеза следует проверить управляемость и наблюдаемость объекта. Эти понятия мы уже ввели для непрерывных систем (см. главу 5) и здесь будем использовать те же обозначения. Убедимся, однако, что доказывать критерии для импульсных систем много проще. ПИД В инженерной практике систем с обратной связью широкое распространение получили так называемые ПИД-регуляторы (пропорциональный – интегрирующий – дифференцирующий)
Непрерывная реализация ПИД-регулятора описывается уравнением
П: увеличение К уменьшает ошибку воспроизведения входа (ухуд запас устойч), И: выполняет ф-цию накапливания и подавления стат ошибки (чем меньше Ти, тем быстрее интеграл состав парирует ошибку), Д: ф-ция улучшения динамич св-в – (вида перех хар-ки системы)
Структурные схемы. Элементы структурных схем. Правила преобразования и переноса. Построение структурных схем по дифференциальным уравнениям. Первая каноническая форма. Вторая каноническая форма. Правило переноса В некоторых случаях для получения общей передаточной функции системы с помощью структурных преобразований удобнее было бы перенести точку приложения сигнала через звено ближе к выходу или входу. При таком преобразовании структурной схемы следует придерживаться правила: передаточная функция системы должна оставаться неизменной. Рассмотрим ситуацию, когда точка приложения сигнала переносится через звено ближе к выходу. Исходная структура системы показана на рисунке.
Определим для нее результирующую передаточную функцию
Перенесем точку приложения сигнала через звено с передаточной функцией, добавив в этот канал некоторую передаточную функцию. Получим структурную схему преобразованной системы
Для нее передаточная функция имеет вид
Поскольку при преобразовании структуры системы ее передаточная функция не должна измениться, приравняв правые части выражений (3.1) и (3.2), определим искомую передаточную функцию
Таким образом, при переносе точки приложения сигнала ближе к выходу системы в канал следует добавить передаточную функцию звена, через которое переносится сигнал. Аналогичное правило можно сформулировать для переноса точки приложения сигнала ближе к входу системы: в соответствующий канал следует добавить обратную передаточную функцию звена, через которое переносится сигнал. Первая каноническая Рассмотрим преобразование математической модели системы с передаточной функцией (3.64). Ее структурную схему можно представить в виде двух последовательно соединенных звеньев (рис. 3.39).
Для каждого звена системы запишем соответствующее операторное уравнение:
Определим из первого уравнения (3.66) старшую производную переменной z, что соответствует значению pnz в операторной форме
Переменные состояния введем
Вторая каноническая Рассмотрим второй способ перехода от передаточной функции (3.63) к описанию в переменных состояния, для чего структуру системы (3.65) схематично представим на рис. 3.42. Ее операторные уравнения имеют вид
Представим первое уравнение (3.68) в виде цепочки из n интеграторов с обратными связями, а входное воздействие z1 сформируем в соответствии со вторым уравнением (3.68) в виде суммы управления u и m его производных (рис. 3.43).
В результате структурных преобразований получим структурную схему системы, приведенную на рис. 3.44. Как видим, и в этом случае структурная схема, соответствующая передаточной функции (3.65), состоит из цепочки n интеграторов. В обратной связи также располагаются коэффициенты характеристического полинома, а в прямой связи – коэффициенты полинома ее числителя.
Снова в качестве переменных состояния используем выходные величины интеграторов и запишем относительно их дифференциальные уравнения состояния и уравнение выхода
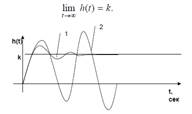
Устойчивость динамических систем. Методы анализа устойчивости линейных систем. Основные понятия и определения. Общее условие устойчивости линейных систем. Алгебраические и частотные критерии устойчивости: Гурвица, Михайлова, Найквиста. Области и запасы устойчивости. Основные понятия и определения. Физически устойчивость означает, что при ограниченном входном сигнале выходной сигнал также является ограниченным и процессы в системе стремятся к определенному значению при любых начальных условиях. Для переходной характеристики устойчивой системы справедливо условие
1 – сходящийся процесс, система устойчива; 2 – расходящийся процесс, система неустойчива Об устойчивости можно судить также по импульсным переходным функциям, которые в случае устойчивой системы удовлетворяют условию
Рассмотрим, как можно оценить это свойство для систем, поведение которых описывают уравнения
Определим зависимость переменных состояния от времени как решение векторно-матричного уравнения состояния в виде
Первое слагаемое соответствует свободной составляющей движения (из произвольных начальных условий), второе – вынужденной (движение под действием управления). Запишем уравнение статики, полагая в (4.1)
откуда при det A≠0 определим равновесное значение переменных состояния
Введем новые координаты, равные отклонениям от точки равновесия,
После подстановки в (4.6) вместо его Учитывая (4.4), уравнение в отклонениях принимает вид
Как видим, уравнение (4.7) не содержит u, и поэтому переходный процесс по Δ порождается только ненулевыми начальными условиями согласно уравнению Линейная система (4.1) называется устойчивой, если для ее процессов выполняется условие Первая интегральная оценка
которая дает объективные результаты только в случае монотонного переходного процесса; Вторая интегральная оценка
которая характеризует площадь под кривой
3) третья интегральная оценка
Наиболее удобной оценкой является та, которая сравнительно просто вычисляется и может применяться для характеристики как монотонного, так и колебательного процесса. Она отражает, по существу, затраты энергии на совершение переходного процесса. Идеальный переходный процесс (без лишних потерь энергии) показан на правом рис.
В общем случае интегральная оценка качества переходного процесса записывается следующим образом:
где
Качество работы динамических систем. Корневой метод анализа качества процессов. Частотный метод анализа качества переходных процессов. Анализ процессов в системах низкого порядка. Системы 1-го, 2-го и 3-го порядков. Диаграмма Вышнеградского. Частотный метод анализа Общие соотношения Рассмотрим соотношения
Частотный метод анализа позволяет оценить реакцию системы на входное воздействие v(t) при нулевых начальных условиях. Оценка переходных процессов по вещественной частотной характеристике Оценка 1. Начальное значение переходной характеристики соответствует конечному значению ВЧХ Оценка 2. Установившееся значение переходной характеристики равно начальному значению ВЧХ
Оценка 3. Если для частотных характеристик двух систем справедливо
то аналогичное соотношение будет связывать и переходные характеристики
Оценка 4. В случае, когда частотные характеристики двух систем связаны следующим образом:
Оценка 5. Если ВЧХ R(ω) является положительной невозрастающей функцией, то перерегулирование в системе не будет превышать 18 %.
Таким образом, с помощью приведенных оценок можно приближенно (без вычислений) оценить качество переходного процесса в системе по известной ВЧХ. Корневой метод анализа Рассмотрим одноканальные системы вида
Общая реакция на входной сигнал при ненулевых начальных условиях описывается соотношением
Нас интересует первая составляющая правой части уравнения, которая представляет собой линейную комбинацию мод
Система третьего порядка
Установившееся значение для выходной переменной соответствует выражению (5.31) и зависит только от коэффициента усиления k, инерционность процессов зависит от T, а колебательные свойства системы определяются параметрами A и B. Для исследования этой зависимости используется диаграмма И.А. Вышнеградского [6], полученная им в 1876 г. на основе характеристического уравнения
Параметры A и B, которые используются для описания системы третьего порядка, носят название параметров Вышнеградского. Кроме колебательности они определяют устойчивость системы, которая будет иметь место при выполнении условия AB 1, что соответствует критерию Гурвица. Введем в рассмотрение область значений параметров А и В (рис. 5.26) и нанесем границу устойчивости, AB=1. Разобьем ее на подобласти с различным распределением корней характеристического уравнения (5.36), а, следовательно, и видом процессов.
Так как при всех значениях параметров A и B из области 1 корни характеристического уравнения (5.36) будут вещественными, то и процесс будет иметь апериодический характер (рис. 5.27, а). Если параметры A и B выбраны в области 2, где ближайшей к мнимой оси будет пара комплексно-сопряженных корней, то им соответствуют колебательные процессы (рис. 5.27, б). В случае, когда вещественный корень располагается ближе к мнимой оси, чем пара комплексно-сопряженных (область 3), колебательная составляющая затухает быстрее и процессы будут иметь вид, представленный на рис. 5.27, в.
Статические и астатические системы. Оценки точности установившихся процессов. Свойства статических систем. Понятие астатизма. Свойства астатических систем. Следящие системы (системы позиционирования). Неединичная обратная связь. Статическим (установившимся) называют такой режим работы линейной системы, при котором переменные с течением времени не изменяются. Статическая такая система управления (рис. 5.6), функционирование которой всегда предполагает наличие статической ошибки
W1(p) и W2(p) –не содержат в своем составе интеграторов, поэтому в статике они вырождаются в коэффициенты усиления W1(0)= k1; W2(0)=k2. Первый блок системы представляет собой регулятор (с передаточной функцией W1(p)), а второй – объект управления (с передаточной функцией W2(p)). Выражение для ошибки:
или после преобразований:
Полная ошибка регулирования складывается из двух составляющих: одна из них порождена входным воздействием, вторая – возмущением. Этот факт соответствует принципу суперпозиции: реакция системы на несколько внешних воздействий представляет собой сумму реакций на каждое воздействие отдельно. Полную статическую ошибку получим, полагая p=0 в (5.14):
С целью уменьшения полной статической ошибкинеобходимо увеличивать общий коэффициент усиления системы прежде всего за счет коэффициента k 1. Однако его чрезмерное увеличение может привести к неустойчивости системы управления. Астатическими называют системы, в которых отсутствует составляющая статической ошибки, порожденная постоянным входным воздействием. Астатизм обычно достигается введением в состав регулятора интегрирующего звена (рис. 5.8).
Будем полагать, что передаточные функции W1(p) и W2(p) не содержат в своем составе интегрирующих звеньев, и определим ошибку в системе
В статике при p=0 обе составляющие ошибки будут равны нулю (ошибка по входному воздействию и ошибка по возмущению), т. е.
Р ежимом линейной заводки, когда входной сигнал v представляет собой линейное нарастающее воздействие,
Подставим входной сигнал (5.18) в выражение для ошибки (5.16):
В статике получим так называемую скоростную ошибку,
уменьшить которую можно увеличением общего коэффициента усиления системы.
Следящие системы Класс систем, в которых выходная переменная является положением какого-либо технического объекта и должна отслеживать изменения входной величины. Структурным признаком таких систем является наличие на ее выходе интегрирующего звена
В статике первая составляющая ошибки обращается в нуль. Вторая составляющая ошибки, порожденная возмущением, отлична от нуля:
и зависит от коэффициента усиления k1. В следящих системах режим «линейной заводки». В этом случае статическая ошибка представляет собой сумму двух составляющих
Используется для оценки точности следящих систем, для которых он является характерным режимом работы. Неединичная обратная связь До сих пор рассматривали структурные схемы с единичной обратной связью
В реальных системах подобная ситуация встречается очень редко. Как правило, выходной сигнал не является электрическим, это может быть угол поворота, скорость вращения, сила и т. д. Он измеряется с помощью датчика и преобразуется в электрический сигнал обратной связи, для которой имеет место неединичный коэффициент передачи (рис. 5.12).
Здесь y – реальный выходной сигнал объекта управления; y – выходной сигнал с датчика; v – входной сигнал, который в реальной системе всегда имеет ту же размерность, что и выходной сигнал датчика; Kд – коэффициент передачи датчика. Обычно инерционность датчика намного меньше, чем у объекта, поэтому его модель можно представить просто в виде коэффициента усиления. Часто Кд относят к объекту и рассматривают преобразованную структурную схему:
При использовании в системе датчика возникает помеха измерения, поэтому используется следующая схема:
Н(t) – помеха измерения, есть случайная функция времени, диапазон изменения и частотный спектр которой можно оценить. В реальной системе удается стабилизировать не выходную переменную у, а сигнал с волной.
Синтез систем автоматического управления. Основные понятия. Классификация режимов работы системы. Постановка задачи синтеза для одноканального объекта. Под синтезом будем понимать проектирование регулятора для системы автоматического управления по заданным требованиям к ее динамическим и статическим свойствам. Выбор метода синтеза определяется технической ситуацией, поэтому целесообразно предварительно классифицировать режимы работы системы, модель которой имеет вид
Процессы в ней описываются соотношением
определяются: ненулевыми начальными условиями, входными воздействиями и возмущениями. Режимом отработки начальных условий будем называть процесс перехода из произвольных начальных состояний x(0) в равновесные при отсутствии внешних воздействий на систему(ν=0.M=0) (рис. 6.1, а). Первую составляющую выражения (6.2), которая определяет этот режим работы, часто называют свободной составляющей процесса.
Режимом отработки входа будем называть процесс отработки входного воздействия, когда ν=const. Такому режиму работы соответствует вторая составляющая выражения (6.2). Режимом слежения за входом будем называть процесс отработки изменяющегося входного воздействия ν(t) при нулевых начальных условиях и отсутствии возмущений (y(t) Режимом отработки возмущений будем называть процессы, вызванные в системе возмущением M(t) при фиксированных начальных условиях и ν=const. Третья составляющая (6.2) отражает процесс отработки возмущения. Выбор метода синтеза обусловлен режимом работы системы, при чем требования к качеству процессов задаются в определенной форме на основе стандартных оценок: быстродействия, перерегулирования и статической ошибки. При отработке входа для описания процессов обычно используются следующие динамические характеристики: h(t), g(t), W(p), W( Ресурсное ограничение. Рассмотрим объект управления (6.3), полагая, что помеху измерения удалось исключить. В этом случае его операторное уравнение имеет вид
Желаемое уравнение для замкнутой системы, соответствующее (6.6), запишем как
Приравнивая правые части выражений (6.7) и (6.8), определим «точное» управляющее воздействие
Если удастся реализовать закон управления (6.9), то поведение замкнутой системы будет точно соответствовать желаемой передаточной функции (6.6). Поскольку для реального объекта ресурс управления всегда ограничен, задача синтеза будет разрешима при выполнении первого условия которое и называется ресурсным ограничением. К сожалению, на практике реализовать управление (6.9) невозможно, так как закон изменения возмущения M(t) неизвестен, кроме границ его изменения, которые и следует подставить для проверки в соотношение (6.10). Наблюдаемость. Это понятие отражает возможность оценки переменных состояния объекта (6.12) по результатам измерения выходных переменных. Объект называется наблюдаемым, если в любой момент времени можно оценить состояние x по данным измерения выходных переменных y(t)и управляющих воздействий u(t). Условие проверяется с помощью критерия наблюдаемости, который приводится без доказательства [2, 7]. Объект (6.12) наблюдаем тогда и только тогда, когда матрица наблюдаемости
имеет полный ранг, т. е. Это условие можно проверить по соотношению В случае одноканального объекта критерий наблюдаемости (6.19) принимает вид
Задача синтеза будет иметь решение, если объект наблюдаем, т. е. условие наблюдаемости также является условием разрешимости задачи синтеза. В случае, когда
которое позволяет уравнения (6.12) записать в форме
Здесь переменные
На схеме пунктиром выделена ненаблюдаемая часть. Если она неустойчива, то стабилизировать объект нельзя. Следовательно, в этом случае условие разрешимости задачи синтеза – устойчивость ненаблюдаемой части объекта. Частотный метод синтеза корректирующих звеньев. Основные соотношения метода. Понятия зоны высоких, средних и низких частот. Построение ЛАЧХ объекта. Построение желаемой ЛАЧХ. Определение ЛАЧХ корректирующего звена. Расчет передаточной функции корректирующего звена и схемная реализация на интегрирующих элементах.
Дано: статическая ошибка Определить: передаточную функцию Wk(p) регулятора (корректирующего звена), включение которого в систему обеспечит в ней заданное качество работы. Частотный метод синтеза предполагает использование асимптотических ЛАЧХ, он применяется для расчета одноканальных систем, функционирующих в режиме слежения или отработки входного воздействия.
Полагая возмущение и помеху равными нулю (M=0,H=0), Определим сначала передаточную функцию разомкнутой системы
а затем замкнутой Построение ЛАЧХ объекта Процедура построения L0( • На частоте • На оси абсцисс отмечаются частоты сопряжения • До первой частоты сопряжения строится низкочастотная асимптота с наклоном -20дБ/дек., если W0(p) содержит интегрирующие звенья, а r – число таких звеньев. Наклон характеристики будет равен +20дБ/дек., если передаточная функция объекта содержит дифференцирующие звенья, l – число этих звеньев. Низкочастотная асимптота строится таким образом, чтобы она сама или ее продолжение проходили через точку 20lgk0.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-06; просмотров: 524; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.2.15 (0.219 с.) |

 с нулевыми начальными условиями
с нулевыми начальными условиями 
 ) = 1(t-
) = 1(t- 

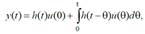 где
где  – переменная интегрирования.
– переменная интегрирования.



 , что позволяет записывать дифференциальные уравнения как алгебраические и вводить новую динамическую характеристику – передаточную функцию.
, что позволяет записывать дифференциальные уравнения как алгебраические и вводить новую динамическую характеристику – передаточную функцию. x
x  y=Cx, y
y=Cx, y  , u
, u  , m
, m  передаточная функция вычисляется по следующему выражению: W(p) = C(pI - A)-1B - матричная передаточная функция.
передаточная функция вычисляется по следующему выражению: W(p) = C(pI - A)-1B - матричная передаточная функция.
 где
где  – характеристический полином. Его корни называются полюсами, а корни полинома числителя передаточной функции
– характеристический полином. Его корни называются полюсами, а корни полинома числителя передаточной функции  - нулями системы.
- нулями системы.

 :
:












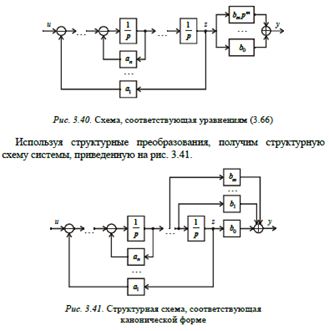 Полученное выражение позволяет представить первое уравнение (3.66) в виде цепочки из n интеграторов с обратными связями, а выходная переменная y формируется в соответствии со вторым уравнением (3.66) как сумма переменной z и ее m производных (рис. 3.40).
Полученное выражение позволяет представить первое уравнение (3.66) в виде цепочки из n интеграторов с обратными связями, а выходная переменная y формируется в соответствии со вторым уравнением (3.66) как сумма переменной z и ее m производных (рис. 3.40).










 и запишем для них ДУ
и запишем для них ДУ  так как x0=0.
так как x0=0. значения из (4.1) с учетом (4.5) получим
значения из (4.1) с учетом (4.5) получим 





 на левом рис
на левом рис


 – некоторая функция ошибки. Применение конкретной интегральной оценки зависит от вида переходного процесса и требований, предъявляемых к системе.
– некоторая функция ошибки. Применение конкретной интегральной оценки зависит от вида переходного процесса и требований, предъявляемых к системе.





 для переходных характеристик справедливо соотношение
для переходных характеристик справедливо соотношение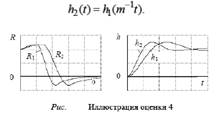




 где λi – корни характеристического уравнения системы I (1,....,n).
где λi – корни характеристического уравнения системы I (1,....,n).



 .
.
 ,
, (5.14)
(5.14) (5.15), где k=k 1 k 2 – общий коэффициент усиления, характеризующий глубину обратной связи.
(5.15), где k=k 1 k 2 – общий коэффициент усиления, характеризующий глубину обратной связи.


 (5.17)
(5.17) или в операторной форме
или в операторной форме где
где  .
.











 ). Данному процессу также будет соответствовать вторая составляющая (6.2).
). Данному процессу также будет соответствовать вторая составляющая (6.2). ) которым соответствуют определенные методы синтеза. К настоящему времени наиболее полно разработан частотный метод, основанный на логарифмических частотных характеристиках L(
) которым соответствуют определенные методы синтеза. К настоящему времени наиболее полно разработан частотный метод, основанный на логарифмических частотных характеристиках L( ) и
) и  . Если рассматривается режим отработки начальных условий и возмущений, то лучше применять модальный метод синтеза.
. Если рассматривается режим отработки начальных условий и возмущений, то лучше применять модальный метод синтеза. (6.7)
(6.7) (6.8)
(6.8) (6.9)
(6.9)
 (6.18)
(6.18) (6.19)
(6.19)
 (6.20)
(6.20) , т. е. объект (6.12) не полностью наблюдаем, существует невырожденное преобразование переменных
, т. е. объект (6.12) не полностью наблюдаем, существует невырожденное преобразование переменных
 (6.21)
(6.21) характеризуют ненаблюдаемую часть объекта (рис. 6.6).
характеризуют ненаблюдаемую часть объекта (рис. 6.6).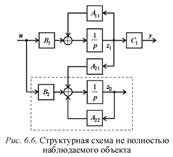
 , перерегулирование (
, перерегулирование ( ) и быстродействие
) и быстродействие  .
.


 (или в логарифмическом масштабе lg
(или в логарифмическом масштабе lg  ) фиксируется точка, соответствующая значению 20lgk0 где k0- коэффициент усиления объекта.
) фиксируется точка, соответствующая значению 20lgk0 где k0- коэффициент усиления объекта. =
=  , i-
, i-  где n – число типовых звеньев в составе переда- точной функции объекта.
где n – число типовых звеньев в составе переда- точной функции объекта.


