
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Конструкции исполнительных двигателей постоянного токаСодержание книги
Поиск на нашем сайте
По конструкции исполнительные двигатели можно разделить на двигатели с ферромагнитным якорем и малоинерционные, не имеющие ферромагнитного сердечника якоря. Двигатели с ферромагнитным якорем и обмоткой возбуждения отличаются от обычных машин лишь тем, что имеют полностью шихтованную магнитную систему (якорь, полюса, станину), что продиктовано стремлением уменьшить потери в стали и увеличить быстродействие в переходных режимах. Это двигатели серий СЛ, МИ, ПБС и др. Есть двигатели (серии ДП и ДПМ), в которых роль обмотки возбуждения выполняют постоянные магниты. В остальном они ничем не отличаются от названных выше. Существуют двигатели, например серии МИГ, в которых обмотка якоря располагается не в пазах (их нет), а непосредственно на поверхности якоря, закрепляясь на ней с помощью специального клея и бандажей. "Беспазовое" исполнение обмотки значительно уменьшает ее индуктивность, улучшает коммутацию и увеличивает быстродействие. Недостатком гладкого якоря является большой немагнитный промежуток между ним и полюсом, что увеличивает размеры обмотки возбуждения. Малоинерционные двигатели выпускаются двух типов: 1) с дисковым якорем и печатной обмоткой; 2) с полым немагнитным якорем и обычной обмоткой. Один из вариантов двигателя первого типа показан на рис. 2.14. В его состав входят: дисковый якорь 1, выполненный из тонкого изоляционного материала, на обеих сторонах которого фотохимическим методом нанесена обмотка якоря; кольца 2 и 3 из магнитомягкой стали, по которым замыкается магнитный поток, созданный постоянными магнитами 4, и щетки 5, непосредственно касающиеся оголенных проводников якоря. Как видно, здесь отсутствует отдельный коллектор. Двигатель второго типа показан на рис. 2.15. Якорь малоинерционных двигателей примерно в 8 раз легче, а момент инерции в 5¸ 10 раз меньше, чем у обычного двигателя. В результате их постоянные времени в 2¸ 2,5 раза меньше. К тому же они имеют практически безыскровую коммутацию, поскольку их секции обладают меньшей индуктивностью. К недостаткам таких двигателей можно отнести большой воздушный зазор, а, следовательно, большие габариты по сравнению с обычными машинами.
Тахогенераторы Общие сведения Тахогенераторами (ТГ) называются электрические машины небольшой мощности, преобразующие механическое вращение в электрический сигнал. Главное требование, предъявляемое к тахогенераторам, заключается в линейности выходной характеристики – пропорциональной зависимости между выходным напряжением U и угловой скоростью вращения n:
где: k, k’ – коэффициенты пропорциональности; Из уравнения (4.1) видно, что тахогенераторы можно использовать для измерения скорости вращения и для электромеханического дифференцирования, если за входной сигнал принять угол поворота ротора. По роду тока тахогенераторы можно разделить на ТГ переменного и ТГ постоянного тока.
Асинхронный тахогенератор Конструкция асинхронного тахогенератора ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором. Как и в ИД, одна из обмоток статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), с другой – генераторной обмотки (ГО) снимается выходное напряжение (рис. 4.1).
Рис. 4.1. К вопросу о принципе действия асинхронного тахогенератора Принцип действия асинхронного тахогенератора заключается в следующем. (Для упрощения качественного анализа примем полый ротор состоящим из конечного числа витков, замкнутых на торцах). При питании обмотки возбуждения переменным током частоты В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток В контурах, параллельных оси обмотки возбуждения, но теперь уже под действием ЭДС вращения тоже протекают токи, которые создают свой поток Если принять, что магнитный поток возбуждения является гармонической функцией времени
Таким образом, величина выходной ЭДС асинхронного тахогенератора пропорциональна угловой скорости вращения, а ее частота равна частоте сети возбуждения. При подключении нагрузки выходное напряжение
В общем случае асинхронный тахогенератор (АТГ) представляет несимметричную двухфазную машину, которую можно исследовать методом симметричных составляющих, что приводит к следующему выражению выходной характеристики [1]
(4.2)
где Как следует из выражения (4.2), выходное напряжение Так как Комплексный коэффициент В [1]:
где
|
||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 391; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.218.245.179 (0.009 с.) |


 , (4.1)
, (4.1) – угол поворота.
– угол поворота.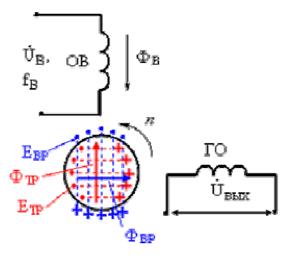
 возникает пульсирующий магнитный поток
возникает пульсирующий магнитный поток  , который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС –
, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС –  (показана внутри ротора) и ЭДС вращения –
(показана внутри ротора) и ЭДС вращения –  (показана снаружи ротора).
(показана снаружи ротора). , который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку
, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку  . Он, пульсируя по оси генераторной обмотки, и наводит в ней выходную ЭДС.
. Он, пульсируя по оси генераторной обмотки, и наводит в ней выходную ЭДС. , то мгновенное значение ЭДС вращения будет
, то мгновенное значение ЭДС вращения будет  . Ток, созданный этой ЭДС,
. Ток, созданный этой ЭДС,  . (Индуктивным сопротивление ротора можно пренебречь, поскольку он немагнитный, да к тому же выполнен из материала с высоким удельным сопротивлением). При отсутствии насыщения магнитный поток пропорционален току
. (Индуктивным сопротивление ротора можно пренебречь, поскольку он немагнитный, да к тому же выполнен из материала с высоким удельным сопротивлением). При отсутствии насыщения магнитный поток пропорционален току  . Тогда мгновенное значение выходной ЭДС будет
. Тогда мгновенное значение выходной ЭДС будет  . Угловая частота сети
. Угловая частота сети  . Так как ЭДС изменяется по гармоническому закону, ее действующее значение будет
. Так как ЭДС изменяется по гармоническому закону, ее действующее значение будет .
. станет меньше ЭДС
станет меньше ЭДС  на величину внутреннего падения напряжения
на величину внутреннего падения напряжения 
 – коэффициент трансформации АТГ; – напряжение возбуждения;
– коэффициент трансформации АТГ; – напряжение возбуждения;  – относительная частота вращения;
– относительная частота вращения;  и
и  – комплексные коэффициенты, зависящие от величины и характера нагрузки
– комплексные коэффициенты, зависящие от величины и характера нагрузки  , от параметров схемы замещения АТГ.
, от параметров схемы замещения АТГ. . Нелинейность создает квадратичная зависимость
. Нелинейность создает квадратичная зависимость  . Если
. Если  , то
, то  .
. , то с целью уменьшения
, то с целью уменьшения  . Правда при этом не уменьшают
. Правда при этом не уменьшают  , поскольку при
, поскольку при  , слабее проявляется магнитная несимметрия машины. Обычно
, слабее проявляется магнитная несимметрия машины. Обычно  .
. ,
, – полное сопротивление обмотки возбуждения статора АТГ. Ясно, что с увеличением
– полное сопротивление обмотки возбуждения статора АТГ. Ясно, что с увеличением  , коэффициент
, коэффициент  . К уменьшению
. К уменьшению  и
и 


