Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Элементы и устройства систем управленияСтр 1 из 33Следующая ⇒
А. В. Марков
Элементы и устройства систем управления
Конспект лекций для студентов специальности 1–53 01 07 «Информационные технологии и управление
В 2–х частях Часть 1
Минск БГУИР 2011
1. Основы теории однофазных и несимметричных двухфазных микромашин 1.1. Намагничивающие силы и магнитные поля однофазных микромашин. 5 1.2. Намагничивающие силы и магнитные поля несимметричных двухфазных 2. Частота вращения эллиптического поля. 7 2.1. Получение кругового вращающегося магнитного поля в несимметричных 2.2. Пусковые моменты несимметричных двухфазных микромашин. 9 2.3. Метод симметричных составляющих применительно к несимметричным 3. Схемы замещения несимметричных двухфазных микромашин. 12 4. Уравнения токов. 16 4.1. Электромагнитная мощность. Вращающий момент несимметричного 4.2. Энергетическая диаграмма. Потери мощности. 18 5. Асинхронные микродвигатели Общие сведения. 20 5.1. Принцип действия и основные особенности однофазных асинхронных 5.2. Свойства фазосдвигающих элементов. 23 5.3. Получение кругового поля в конденсаторном микродвигателе. 25 6. Асинхронный двигатель с пусковым конденсатором.. 28 6.1. Асинхронный двигатель с рабочим конденсатором.. 29 6.2. Асинхронный двигатель с пусковым и рабочим конденсаторами. 30 6.3. Асинхронный двигатель с пусковым сопротивлением.. 30 6.4. Асинхронный двигатель с экранированными полюсами. 32 6.5. Универсальный асинхронный двигатель. 35 6.6. Включение трехфазного двигателя в однофазную сеть. 36 7. Синхронные микродвигатели с постоянными магнитами. 37 8. Синхронные реактивные микродвигатели. 42 9. Синхронные гистерезисные микродвигатели. 47 10. Универсальные коллекторные микродвигатели. 52 11. Бесконтактные двигатели постоянного тока. 56 12. Тихоходные двигатели. 62 12.1. Дробные обмотки. 62 12.3. Двигатели с электромагнитной редукцией. 65 13. Двигатели с катящимся ротором.. 69 13.1. Двигатели с волновым ротором.. 73 14. Пьезоэлектрические микродвигатели. 74 14.1. Пьезоэлектрический эффект. 74 14.2. Конструкция и принцип действия пьезоэлектрических микродвигателей. 75
14.3. Применение пьезоэлектрических микродвигателей. 77 15. Электрические микромашины автоматических устройств. 78 15.1. Общие сведения. 80 15.2. Уравнения токов и схемы замещения асинхронных исполнительных двигателей. 82 15.3. Характеристики асинхронного исполнительного двигателя при разных 16. Исполнительные двигатели постоянного тока. 85 16.1 Якорное управление исполнительным двигателем.. 85 16.2. Полюсное управление исполнительным двигателем.. 87 17. Полюсное управление исполнительным двигателем.. 89 18. Динамические свойства асинхронных исполнительных двигателей. 96 18.1. Самоход и пути его устранения. 98 18.2. Конструкции асинхронных исполнительных двигателей. 101 19. Поворотные трансформаторы. Общие положения. 104 19.1. Синусно–косинусные поворотные трансформаторы. 105 19.2. Симметрирование синусно–косинусных поворотных трансформаторов. 108 20. Импульсное управление исполнительным двигателем постоянного тока. 110 20.1. Динамические характеристики исполнительных двигателей постоянного тока. 112 20.2. Конструкции исполнительных двигателей постоянного тока. 113 21. Тахогенераторы.. 114 21.1. Общие сведения. 114 21.2. Асинхронный тахогенератор. 114 21.3. Погрешности асинхронного тахогенератора. 117 22. Акселерометр. 120 22.1. Синхронный тахогенератор. 121 22.2. Тахогенераторы постоянного тока. 122 23. ИНДУКЦИОННЫЕ МАШИНЫ СИСТЕМ СИНХРОННОЙ СВЯЗИ – СЕЛЬСИНЫ... 125 23.1 Общие положения. 125 23.2 Устройство сельсинов. 127 23.3 Работа сельсинов в индикаторном режиме. 128 24. МДС ротора. 130 24.1. Максимальный синхронизирующий момент. 132 24.2. Факторы, влияющие на точность работы сельсинов в индикаторном режиме. 132 25. Работа сельсинов в трансформаторном режиме. 134 25.1. Некоторые особенности конструкции сельсинов. 137 25.2. Дифференциальный сельсин. 137 26. Линейный поворотный трансформатор. 140 26.1 Поворотный трансформатор–построитель. 142 26.2 Погрешности поворотных трансформаторов. 142 26.3. Многополюсные поворотные трансформаторы.. 144 26.4. Синусные обмотки. 145 27. Шаговые двигатели. 146 27.1. Общие сведения о шаговых двигателях. 147 27.2. Реверсивные шаговые двигатели. 148
28. Статический синхронизирующий момент. 151 28.1. Режимы работы шаговых двигателей. 152 28.2. Основные параметры и характеристики шаговых двигателей. 155
Уравнения токов
Повторим еще раз уравнения (2.8):
Согласно методу симметричных составляющих
где Разделив левую и правую части последних выражений на wэB, получим
где Подставляя (4.1) в выражение
Рассчитав
Тихоходные двигатели
В технике часто возникает потребность в двигателях с низкими скоростями вращения (от единиц до нескольких десятков оборотов в минуту) без использования механических редукторов. Применение редукторов нежелательно по причинам их повышенного шума, значительных масс и габаритов, люфтов и ряда других отрицательных последствий. Малые скорости вращения микродвигателей можно получить следующими принципиально разными способами: 1)выполнением дробных обмоток, т.е. обмоток с числом пазов на полюс и фазу 2)использованием принципа электромагнитной редукции; 3)выполнением двигателей с катящимся или волновым ротором.
Дробные обмотки
Получение малых скоростей путем увеличения числа пар полюсов (при В нашем случае число пазов на полюс и фазу можно записать в виде
где: Для того чтобы получить удовлетворительные обмотки, надо выполнить ряд условий: 1) 2)знаменатель дроби 3) Иногда возникает задача выполнить обмотку с максимальным числом пар полюсов в статоре с заданным числом пазов
В этом случае числитель дроби
Кривая НС обмоток с дробным В качестве примера выполним двухфазную обмотку с числом пазов Решая (6.2), получаем
Из условия (6.3) находим числитель дроби
Следовательно Шаг обмотки по пазам
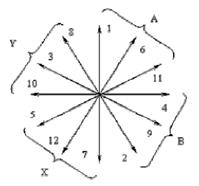
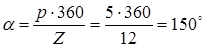
Рис. 6.1. Звезда пазовых ЭДС Находим угол сдвига пазовых ЭДС в электрических градусах
Строим звезду пазовых ЭДС (рис. 6.1) и разбиваем ее на фазные зоны (в нашем случае на 4) Рисуем пазы, указываем направление токов, приняв, что в зонах Y, A они текут вверх, а в зонах B, X – вниз (рис. 6.2)
Рис. 6.2. Схема дробной обмотки (
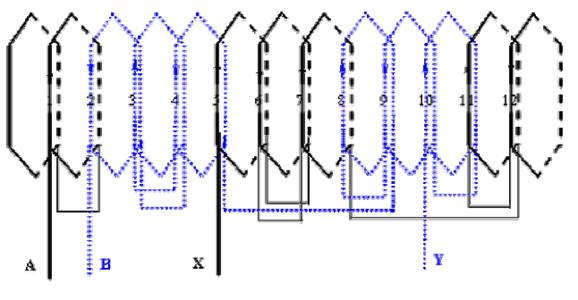
Наконец соединяем катушки наиболее короткими перемычками и получаем нужную обмотку. На рис. 6.3 для момента времени, когда ток в фазах А и Y равен Задачи: 1) Построить кривую НС для момента времени, когда ток в фазе А максимальный, а в фазе В равен нулю. 2) Перечислить все возможные значения дробного
Рис. 6.3. Кривая намагничивающих сил дробной обмотки ( Пьезоэлектрический эффект
Известно, что некоторые твердые материалы, например, кварц способны в электрическом поле изменять свои линейные размеры. Железо, никель, их сплавы или окислы при изменении окружающего магнитного поля также могут изменять свои размеры. Первые из них относятся к пьезоэлектрическим материалам, а вторые – к пьезомагнитным. Соответственно различают пьезоэлектрический и пьезомагнитный эффекты. Пьезоэлектрический двигатель может быть выполнен как из тех, так и из других материалов. Однако наиболее эффективными в настоящее время являются пьезоэлектрические, а не пьезомагнитные двигатели. Существует прямой и обратный пьезоэффекты. Прямой – это появление электрического заряда при деформации пьезоэлемента. Обратный – линейное изменение размеров пьезоэлемента при изменении электрического поля. Впервые пьезоэффект обнаружили Жанна и Поль Кюри в 1880 году на кристаллах кварца. В дальнейшем эти свойства были открыты более чем у 1500 веществ, из которых широко используются сегнетова соль, титанат бария и др. Ясно, что пьезоэлектрические двигатели "работают" на обратном пьезоэффекте.
14.2. Конструкция и принцип действия пьезоэлектрических
В настоящее время известно более 50 различных конструкций ПМД. Рассмотрим некоторые из них. К неподвижному пьезоэлементу (ПЭ)– статору – прикладывается переменное трехфазное напряжение (рис. 7.1). Под действием электрического поля конец ПЭ последовательно изгибаясь в трех плоскостях, описывает круговую траекторию. Штырь, расположенный на подвижном конце ПЭ, фрикционно взаимодействует с ротором и приводит его во вращение.
Рис. 7.1.
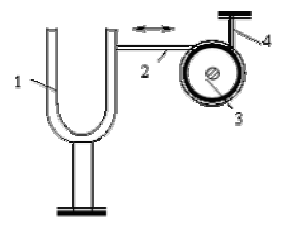
Большое практическое значение получили шаговые ПМД (рис. 7.2.). Электромеханический преобразователь, например, в виде камертона 1 передает колебательные движения стержню 2, который перемещает ротор 3 на один зубец. При движении стержня назад собачка 4 фиксирует ротор в заданном положении.
Рис. 7.2.
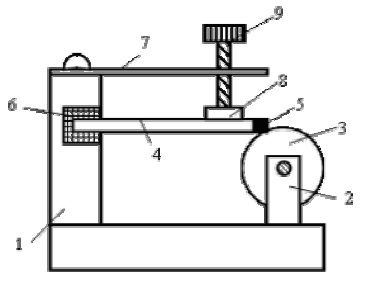
Мощность описанных выше конструкций не превышает сотые доли ватта, поэтому использование их в качестве силовых приводов весьма проблематично. Наиболее перспективными оказались конструкции, в основе которых лежит принцип весла (рис. 7.3). Вспомним, как движется лодка. За время, пока весло находится в воде, его движение преобразуется в линейное перемещение лодки. В паузах между гребками лодка движется по инерции. Основными элементами конструкции рассматриваемого двигателя являются статор и ротор (рис. 7.4). На основании 1 установлен подшипник 2. Ротор 3, выполненный из твердого материала (сталь, чугун, керамика и пр.) представляет собой гладкий цилиндр.
Рис. 7.4.
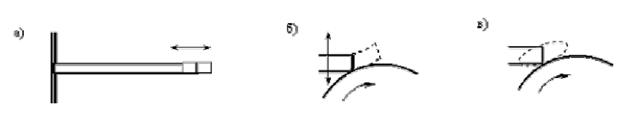
Неотъемлемой частью ПМД является акустически изолированная от основания и оси ротора электромеханическая колебательная система – осциллятор (вибратор). В простейшем случае он состоит из пьезопластины 4 вместе с износостойкой прокладкой 5. Второй конец пластины закреплен в основании с помощью эластичной прокладки 6 из фторопласта, резины или другого подобного материала. Осциллятор прижимается к ротору стальной пружиной 7, конец которой через эластичную прокладку 8 давит на вибратор. Для регулирования степени прижатия служит винт 9. Чтобы объяснить механизм образования вращающего момента, вспомним маятник. Если маятнику сообщить колебания в двух взаимно перпендикулярных плоскостях, то в зависимости от амплитуд, частоты и фаз возмущающих сил его конец будет описывать траекторию от круга до сильно вытянутого эллипса. Так и в нашем случае. Если подвести к пьезопластине переменное напряжение определенной частоты, ее линейный размер будет периодически изменяться: то увеличиваться, то уменьшаться, т.е. пластина будет совершать продольные колебания (рис. 7.5,а).
Рис. 7.5
При увеличении длины пластины ее конец вместе с ротором переместится и в поперечном направлении (рис. 7.5,б). Это эквивалентно действию поперечной изгибающей силы, которая вызывает поперечные колебания. Сдвиг фаз продольных и поперечных колебаний зависит от размеров пластины, рода материала, частоты питающего напряжения и в общем случае может изменяться от Линейная скорость вращения ротора зависит от амплитуды и частоты смещения конца осциллятора. Следовательно, чем больше напряжение питания и длина пьезоэлемента, тем больше должна быть линейная скорость вращения ротора. Однако не следует забывать, что с увеличением длины вибратора, уменьшается частота его колебаний.
Максимальная амплитуда смещения осциллятора ограничивается пределом прочности материала или перегревом пьезоэлемента. Перегрев материала свыше критической температуры – температуры Кюри, приводит к потере пьезоэлектрических свойств. Для многих материалов температура Кюри превышает Угловая скорость ротора
где Отсюда частота вращения в оборотах в минуту
Если диаметр ротора Уменьшение напряжения питания позволяет снизить частоту вращения до 30 об/мин при сохранении достаточно высокой мощности на единицу массы двигателя. Армируя вибратор высокопрочными сапфировыми пластинами, удается поднять частоту вращения до 10000 об/мин. Это позволяет в широкой области практических задач выполнять привод без использования механических редукторов.
Общие сведения Асинхронные исполнительные двигатели это двухфазные двигатели с двумя обмотками на статоре, сдвинутыми в пространстве на 90 электрических градусов (рис.1.1). Для того чтобы обмотки создавали вращающееся магнитное поле, необходим временной сдвиг токов в этих обмотках. В зависимости от способа сдвига токов различают три способа управления исполнительными двигателями: амплитудный (рис.1.1,а); фазовый (рис.1.1,б) и амплитудно–фазовый (рис.1.1,в). При амплитудном управлении на обмотку возбуждения подается напряжение
где
Рис.1.1. Способы управления асинхронным исполнительным двигателем
Круговое магнитное поле и максимальная частота вращения имеют место только при При фазовом управлении на обмотку возбуждения подается напряжение сети Амплитудно–фазовое управление чаще всего реализуется как конденсаторное. На первый взгляд этот способ кажется амплитудным, однако, это не так. Дело в том, что при изменении амплитуды напряжения управления Коэффициентом сигнала Известно, что характеристики конденсаторного двигателя во многом зависят от того, как выбраны соотношения напряжений на обмотках и емкость конденсатора. Обычно их выбирают из условия получения кругового магнитного поля при пуске двигателя. Коэффициент сигнала, обеспечивающий это условие, обозначают Анализируя сказанное выше, можно сделать вывод, что несмотря на конструктивные различия способов управления асинхронным исполнительным двигателем, их объединяет общая идея управления: деформация магнитного поля от кругового к эллиптическому до пульсирующего. Для обеспечения устойчивой работы двигателя во всем диапазоне частот вращения, для расширения зоны регулирования и, как узнаем из дальнейшего, для устранения самохода, асинхронные исполнительные двигатели изготавливают с роторами, имеющими большие активные сопротивления (рис. 1.2). В результате их критические скольжения всегда больше единицы (кривая 1). У обычных машин
Рис.1.2. Механические характеристики исполнительных (1) и силовых (2)
Большие сопротивления ротора приводят к увеличению потерь и снижению механической мощности. Поэтому асинхронные исполнительные двигатели имеют полезную мощность в 2¸ 3 раза меньшую, чем силовые двигатели такого же габарита.
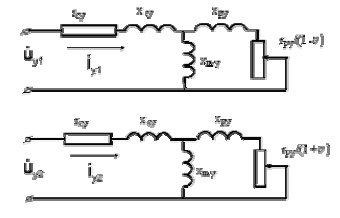
16.2. Уравнения токов и схемы замещения асинхронных исполнительных В общем случае асинхронный исполнительный двигатель является несимметричной двухфазной машиной, для которой можно нарисовать известные четыре схемы замещения. Например, для обмотки управления они имеют следующий вид (рис. 1.3)
Рис. 1.3. Схемы замещения обмотки управления
Здесь: Эти схемы позволяют получить уравнения токов, по которым можно вывести уравнения механических, регулировочных и прочих характеристик. Однако, полученные уравнения будут слишком громоздкими. Для асинхронного исполнительного двигателя ситуацию можно существенно упростить, если в схемах замещения пренебречь всеми сопротивлениями, кроме активного сопротивления ротора
Для последних схем замещения уравнения токов принимают вид:
16.3. Характеристики асинхронного исполнительного двигателя
В общем случае напряжения и образуют несимметричную систему векторов (рис.1.5).
Рис. 1.5.
Используя понятие эффективного коэффициента сигнала, можно записать
Симметричные составляющие напряжения управления будут: Переходя от показательных функций к тригонометрическим и учитывая, что
Электромагнитная мощность с точки зрения передачи энергии со статора на ротор представляет собой сумму электромагнитных мощностей прямой и обратной последовательностей. При круговом поле они равны потерям в роторе, деленным на скольжения /в нашем случае на
Так как по отношению к полю прямой последовательности машина работает в режиме двигателя, а по отношению к полю обратной последовательности в режиме электромагнитного тормоза, то результирующий момент М равен
Подставим в это уравнение квадраты модулей токов
Выразим момент двигателя в относительных единицах. За базисный возьмем пусковой момент, развиваемый двигателем при круговом поле ( Тогда момент в относительных единицах
Уравнение (1.3) есть аналитическое выражение механических характеристик идеального асинхронного исполнительного двигателя, под которыми понимают зависимость момента от угловой скорости вращения при постоянном коэффициенте сигнала. Решив уравнение (1.3) относительно
Рассмотрим механические и регулировочные характеристики а также характеристики мощности при различных способах управления идеальным асинхронным исполнительным двигателем. Поворотные трансформаторы. Общие положения Поворотными (вращающимися) трансформаторами называются небольшие индукционные машины, преобразующие угол поворота ротора в напряжение, пропорциональное либо самому углу, либо его функции. Различают: 1) синусно–косинусные поворотные трансформаторы (СКПТ), которые выдают два напряжения, изменяющиеся по гармоническому закону
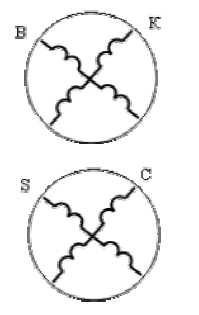
Рис.6.1. Условная схема поворотного трансформатора
Поворотные трансформаторы (ПТ) состоят из статора и ротора, в пазах которых уложено по две взаимно перпендикулярных обмотки (рис.6.1). Одну из статорных обмоток называют обмоткой возбуждения – В, другую – компенсационной– К. Обмотки ротора носят названия синусной – S и косинусной– C. Параметры статорных обмоток полностью идентичны друг другу. Тоже самое справедливо и для роторных обмоток. ПТ относятся к электрическим машинам высокой точности. Достаточно сказать, что изменение взаимной индуктивности между статором и ротором должно отличаться от гармонического закона не более чем на 0,05%. Потребляемая поворотными трансформаторами мощность составляет несколько вольт–ампер при напряжении до 115 В и частоте 50, 400 и 2500 Гц.
Тахогенераторы Общие сведения Тахогенераторами (ТГ) называются электрические машины небольшой мощности, преобразующие механическое вращение в электрический сигнал. Главное требование, предъявляемое к тахогенераторам, заключается в линейности выходной характеристики – пропорциональной зависимости между выходным напряжением U и угловой скоростью вращения n:
где: k, k’ – коэффициенты пропорциональности; Из уравнения (4.1) видно, что тахогенераторы можно использовать для измерения скорости вращения и для электромеханического дифференцирования, если за входной сигнал принять угол поворота ротора. По роду тока тахогенераторы можно разделить на ТГ переменного и ТГ постоянного тока.
Асинхронный тахогенератор Конструкция асинхронного тахогенератора ничем не отличается от асинхронного исполнительного двигателя с полым немагнитным ротором. Как и в ИД, одна из обмоток статора подключается к сети переменного тока и называется обмоткой возбуждения (ОВ), с другой – генераторной обмотки (ГО) снимается выходное напряжение (рис. 4.1).
Рис. 4.1. К вопросу о принципе действия асинхронного тахогенератора Принцип действия асинхронного тахогенератора заключается в следующем. (Для упрощения качественного анализа примем полый ротор состоящим из конечного числа витков, замкнутых на торцах). При питании обмотки возбуждения переменным током частоты В контурах, перпендикулярных оси обмотки возбуждения, под действием трансформаторной ЭДС протекают токи и возникает поток В контурах, параллельных оси обмотки возбуждения, но теперь уже под действием ЭДС вращения тоже протекают токи, которые создают свой поток Если принять, что магнитный поток возбуждения является гармонической функцией времени
Таким образом, величина выходной ЭДС асинхронного тахогенератора пропорциональна угловой скорости вращения, а ее частота равна частоте сети возбуждения. При подключении нагрузки выходное напряжение
В общем случае асинхронный тахогенератор (АТГ) представляет несимметричную двухфазную машину, которую можно исследовать методом симметричных составляющих, что приводит к следующему выражению выходной характеристики [1]
(4.2)
|
|||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 368; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.216.32.116 (0.206 с.) |
 ;
;
 или
или  ;
; или
или  ,
, ,
,  – эффективные числа витков фаз
– эффективные числа витков фаз  и
и  .
. ;
;  , (4.1)
, (4.1) – уже известный коэффициент трансформации двигателя.
– уже известный коэффициент трансформации двигателя. и решая систему двух уравнений относительно
и решая систему двух уравнений относительно  ,
,  получим
получим ,
,  . (4.2)
. (4.2) и
и  , а затем найти полные токи фаз
, а затем найти полные токи фаз  ;
; ) в микромашинах невозможно из–за ограниченных габаритов последних. Это тем более затруднительно, что во многих случаях они выполняются на повышенные частоты (200, 400 и более герц). Использование обмоток с
) в микромашинах невозможно из–за ограниченных габаритов последних. Это тем более затруднительно, что во многих случаях они выполняются на повышенные частоты (200, 400 и более герц). Использование обмоток с  , (6.1)
, (6.1) – число пазов статора;
– число пазов статора;  – число пар полюсов;
– число пар полюсов;  – число фаз;
– число фаз;  и
и  – положительные числа.
– положительные числа. – целое число.
– целое число. . (6.2)
. (6.2) (6.3)
(6.3) содержит большое число высших гармоник. Причем, чем ближе
содержит большое число высших гармоник. Причем, чем ближе  и максимально возможным числом пар полюсов.
и максимально возможным числом пар полюсов. .
. , т.е.
, т.е.  .
. .
.
 .
.
 )
) , построена диаграмма НС. Видно, что кривая намагничивающих сил далеко не синусоидальная, т.е. она содержит большое число ярко выраженных гармоник. Однако обмотка все–таки создает магнитное поле с 10 полюсами.
, построена диаграмма НС. Видно, что кривая намагничивающих сил далеко не синусоидальная, т.е. она содержит большое число ярко выраженных гармоник. Однако обмотка все–таки создает магнитное поле с 10 полюсами. ,
,  . При каком
. При каком 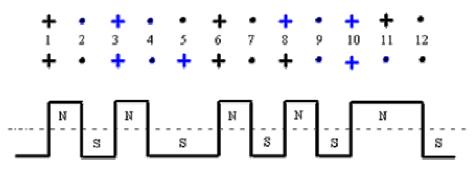

 до
до  . При сдвиге фаз, отличном от
. При сдвиге фаз, отличном от  , поэтому максимальная амплитуда смещения практически ограничивается пределом прочности материала. С учетом двукратного запаса по прочности принимают
, поэтому максимальная амплитуда смещения практически ограничивается пределом прочности материала. С учетом двукратного запаса по прочности принимают  .
. ,
, – диаметр ротора.
– диаметр ротора.
 см, то
см, то  об/мин. Таким образом, изменяя только диаметр ротора, можно в широких пределах изменять частоту вращения машины.
об/мин. Таким образом, изменяя только диаметр ротора, можно в широких пределах изменять частоту вращения машины. , а на обмотку управления – напряжение
, а на обмотку управления – напряжение  , переменное по амплитуде и сдвинутое по фазе относительно него на
, переменное по амплитуде и сдвинутое по фазе относительно него на  . Управление двигателем осуществляется изменением величины напряжения
. Управление двигателем осуществляется изменением величины напряжения  , приведенному к числу витков обмотки управления, называют эффективным коэффициентом сигнала
, приведенному к числу витков обмотки управления, называют эффективным коэффициентом сигнала ,
, – коэффициент трансформации;
– коэффициент трансформации;  и
и  – эффективные числа витков обмоток возбуждения и управления;
– эффективные числа витков обмоток возбуждения и управления;  – коэффициент сигнала.
– коэффициент сигнала.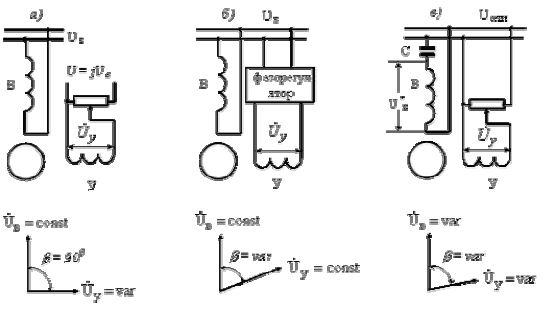
 1. При
1. При  – поле эллиптическое, а частота вращения меньше максимальной. При
– поле эллиптическое, а частота вращения меньше максимальной. При  – поле пульсирующее; двигатель не вращается. Реверс двигателя осуществляется за счет изменения фазы напряжения управления.
– поле пульсирующее; двигатель не вращается. Реверс двигателя осуществляется за счет изменения фазы напряжения управления. , а на обмотку управления – постоянное по амплитуде напряжение, величина которого равна приведенному напряжению возбуждения
, а на обмотку управления – постоянное по амплитуде напряжение, величина которого равна приведенному напряжению возбуждения  ,
,  . Регулирование частоты вращения осуществляется изменением фазы напряжения управления. За коэффициент сигнала здесь принимается
. Регулирование частоты вращения осуществляется изменением фазы напряжения управления. За коэффициент сигнала здесь принимается  . И вновь: при
. И вновь: при  поле круговое, частота вращения максимальная; при
поле круговое, частота вращения максимальная; при  поле эллиптическое, частота вращения меньше максимальной. При
поле эллиптическое, частота вращения меньше максимальной. При  поле пульсирует, частота вращения равна нулю. При
поле пульсирует, частота вращения равна нулю. При  , изменяется ток возбуждения
, изменяется ток возбуждения  , а поскольку напряжение на обмотке возбуждения
, а поскольку напряжение на обмотке возбуждения  равно разности напряжения сети
равно разности напряжения сети  и падения напряжения на конденсаторе
и падения напряжения на конденсаторе  , то оно изменяется как по величине, так и по фазе
, то оно изменяется как по величине, так и по фазе 
 здесь принято называть отношение напряжения управления
здесь принято называть отношение напряжения управления  .
. . Поэтому при
. Поэтому при  – эллиптическое, при
– эллиптическое, при  – пульсирующее.
– пульсирующее. = 0,1¸ 0,5 (кривая 2).
= 0,1¸ 0,5 (кривая 2).
 ;
;  , где
, где  . Такие схемы, да и сами двигатели, будем называть "идеальными" (рис.1.4). Основанием для идеализации служит тот факт, что исполнительные двигатели выполняются с роторами, имеющими большое активное сопротивление.
. Такие схемы, да и сами двигатели, будем называть "идеальными" (рис.1.4). Основанием для идеализации служит тот факт, что исполнительные двигатели выполняются с роторами, имеющими большое активное сопротивление.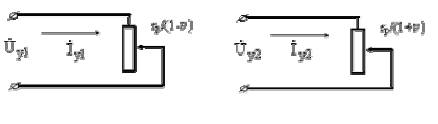
 ;
;  (16.1)
(16.1) ,
,  Свойства и поведение асинхронного исполнительного двигателя определяются механическими и регулировочными характеристиками.
Свойства и поведение асинхронного исполнительного двигателя определяются механическими и регулировочными характеристиками.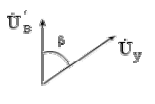


 , подставим полученные значения
, подставим полученные значения  и
и  в (1.1)
в (1.1)
 (16.2)
(16.2) и
и  /
/

 и
и 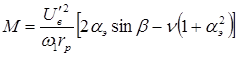
 ,
,  ,
,  )
)
 (16.3)
(16.3) (16.4)
(16.4) и
и  ; 2)линейные поворотные трансформаторы (ЛПТ), выходное напряжение которых изменяется по закону
; 2)линейные поворотные трансформаторы (ЛПТ), выходное напряжение которых изменяется по закону  .
.
 , (4.1)
, (4.1) – угол поворота.
– угол поворота.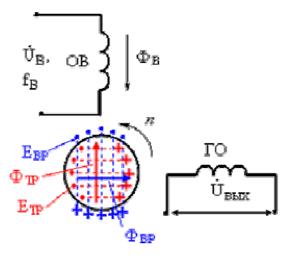
 возникает пульсирующий магнитный поток
возникает пульсирующий магнитный поток  , который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС –
, который во вращающемся роторе индуцирует два вида ЭДС: трансформаторную ЭДС –  (показана внутри ротора) и ЭДС вращения –
(показана внутри ротора) и ЭДС вращения –  (показана снаружи ротора).
(показана снаружи ротора). , который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку
, который в соответствии с принципом Ленца направлен встречно потоку обмотки возбуждения, однако его действие компенсируется увеличением тока возбуждения. Так как ось генераторной обмотки перпендикулярна потоку  . Он, пульсируя по оси генераторной обмотки, и наводит в ней выходную ЭДС.
. Он, пульсируя по оси генераторной обмотки, и наводит в ней выходную ЭДС. , то мгновенное значение ЭДС вращения будет
, то мгновенное значение ЭДС вращения будет  . Ток, созданный этой ЭДС,
. Ток, созданный этой ЭДС,  . (Индуктивным сопротивление ротора можно пренебречь, поскольку он немагнитный, да к тому же выполнен из материала с высоким удельным сопротивлением). При отсутствии насыщения магнитный поток пропорционален току
. (Индуктивным сопротивление ротора можно пренебречь, поскольку он немагнитный, да к тому же выполнен из материала с высоким удельным сопротивлением). При отсутствии насыщения магнитный поток пропорционален току  . Тогда мгновенное значение выходной ЭДС будет
. Тогда мгновенное значение выходной ЭДС будет  . Угловая частота сети
. Угловая частота сети  . Так как ЭДС изменяется по гармоническому закону, ее действующее значение будет
. Так как ЭДС изменяется по гармоническому закону, ее действующее значение будет .
. станет меньше ЭДС
станет меньше ЭДС  на величину внутреннего падения напряжения
на величину внутреннего падения напряжения