
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синусно–косинусные поворотные трансформаторыСодержание книги
Поиск на нашем сайте
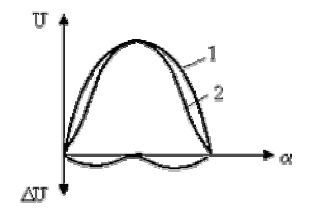
Для начала рассмотри работу СКПТ в режиме холостого хода (
Рис. 6.2. Схема включения СКПТ в режиме холостого хода
При питании обмотки возбуждения переменным током возникает пульсирующий магнитный поток возбуждения
где С использованием этого понятия
т.е. в режиме холостого хода ЭДС СКПТ являются гармоническими функциями угла поворота ротора.
Рис.6.2. Схема включения СКПТ в режиме нагрузки а) и диаграмма потов б)
При подключении к синусной обмотке нагрузки Zsн по обмотке потечет ток, где Продольная составляющая пытается размагнитить СКПТ, но ее действие компенсируется увеличением тока возбуждения. Поэтому в первом приближении можно считать, что поток возбуждения и в режиме холостого хода и в режиме нагрузки остается примерно одинаковым
Поперечный поток
где
Тогда полное значение ЭДС синусной обмотки при нагрузке
Решив это уравнение относительно
Здесь – комплексный коэффициент, зависящий от параметров нагрузки и синусной обмотки ротора. Если бы нагрузку подключили к косинусной обмотке, получили бы
Здесь – комплексный коэффициент, зависящий от параметров нагрузки и косинусной обмотки ротора.
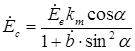
Рис.6.3. Зависимости выходного напряжения СКПТ при холостом ходе (1), нагрузке (2) и
амплитудной погрешности от угла поворота ротора
Из (6.1) и (6.2) видно, что при нагрузке выходные ЭДС СКПТ уже не являются гармоническими функциями угла поворота ротора. Возникают погрешности, относительные значения которых: Поскольку коэффициенты На рис. 6.3 показаны зависимости ЭДС синусной обмотки при холостом ходе (кривая 1), при нагрузке (кривая 2) и амплитудной погрешности (кривая 3) в функции угла поворота ротора.
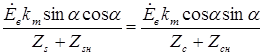
20.2. Симметрирование синусно–косинусных поворотных С целью устранения искажающего действия поперечного потока Фq, осуществляют так называемое симметрирование поворотного трансформатора. Оно может быть первичным и вторичным. Первичное симметрирование выполняется со стороны статора и заключается в замыкании компенсационной обмотки на какое–то сопротивление или накоротко (рис. 6.4). Условием первичного симметрирования является равенство (симметрия) полных сопротивлений цепи обмотки возбуждения и цепи компенсационной обмотки: Сущность первичного симметрирования состоит в том, что поперечный поток
Рис.6.4. К вопросу о первичном симметрировании СКПТ
Достоинством первичного симметрирование является то, что при изменении нагрузки автоматически изменяется величина потока Недостатком первичного симметрирования служит зависимость тока возбуждения СКПТ от угла поворота ротора
Вторичное симметрирование выполняется со стороны ротора в том случае, когда нагрузка подключается только к одной обмотке, например к синусной. Оно заключается в замыкании второй роторной обмотки на сопротивление
Рис.6.5. К вопросу о вторичном симметрировании СКПТ
При выполнении вторичного симметрирования
Выразим токи роторных обмоток через ЭДС и сопротивления
При отсутствии поперечных потоков, учитывая
Из этого уравнения следует, что для осуществления вторичного симметрирования необходимо, чтобы симметрирующее сопротивление Недостаток вторичного симметрирования заключается в том, что оно практически выполнимо только при постоянной нагрузке. Достоинством служит независимость тока возбуждения от угла поворота ротора
Здесь На практике, там, где это возможно, выполняют одновременно и первичное и вторичное симметрирование СКПТ (рис. 6.6), добиваясь почти полного уничтожения искажающего действия поперечного потока ротора.
Рис.6.6. Первичное и вторичное симметрирование СКПТ
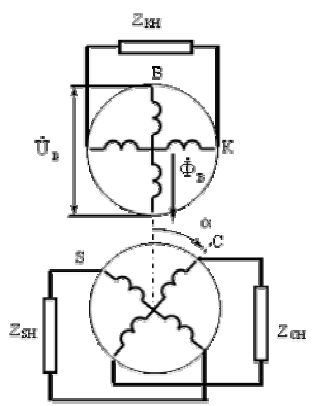
21. Импульсное управление исполнительным В связи с развитием полупроводниковой техники все шире применяется импульсное управление исполнительным двигателем. Суть его заключается в том, что частоту вращения двигателя регулируют не величиной постоянно подводимого напряжения, а длительностью питания двигателя номинальным напряжением. Одна из возможных схем импульсного управления приведена на рис. 2.7, а. Там же (рис. 2.7, б) показаны графики скорости при различных В период, когда электронный ключ открыт, питающее напряжение полностью подается на двигатель, ток якоря увеличивается, двигатель развивает положительный момент и частота вращения возрастает; когда электронный ключ закрыт, ток под действием запаса электромагнитной энергии продолжает протекать в том же направлении но через обратный диод. При этом он уменьшается, момент двигателя уменьшается, угловая скорость вращения падает.
Рис. 2.7. Схема импульсного управления (а), графики скорости вращения (б) при разных τ (τ2 > τ1)
Работа двигателя состоит из чередующихся периодов разгона и торможения. И, если эти периоды малы по сравнению с электромагнитной постоянной времени якорной цепи Частота управляющих импульсов составляет 200–400 Гц, в результате период управления Т оказывается на 2 порядка меньше электромагнитной постоянной времени обмотки якоря
Управление, при котором изменяется соотношение длительности импульса Если параметры схемы подобраны так, что колебания тока, момента и угловой скорости вращения небольшие, работа двигателя практически не отличается от работы при постоянном напряжении, за которое можно принять среднее напряжение за период управления Оперируя средними значениями, получим уравнение, аналогичное (2.4), поскольку в данном случае мы имеем якорное управление
На рис. 2.8, а показаны графики тока сети
Рис. 2.8. Графики тока сети малых нагрузках (б) Критическая относительная частота вращения, при которой наступает перелом, равна
где
Основное преимущество импульсного управления заключается в уменьшении средней потребляемой мощности за счет уменьшения среднего тока.
21.1. Динамические характеристики исполнительных двигателей Механические характеристики исполнительных двигателей постоянного тока линейные, поэтому для них выражение электромеханической постоянной времени будет иметь известный вид (1.11). При якорном управлении характеристики параллельные, т.е. пусковой момент и угловая скорость холостого хода изменяются пропорционально коэффициенту сигнала: При полюсном управлении пусковой момент прямо– а угловая частота вращения холостого хода обратно пропорциональны коэффициенту сигнала:
|
|||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 405; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.189.19 (0.012 с.) |

 ).
).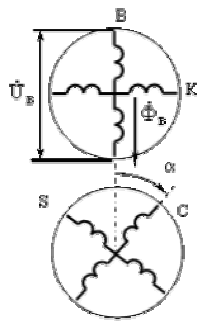
 , который индуцирует в обмотках ротора ЭДС. Поскольку взаимная индуктивность между статором и ротором является гармонической функцией угла поворота, можно утверждать, что эти ЭДС будут:
, который индуцирует в обмотках ротора ЭДС. Поскольку взаимная индуктивность между статором и ротором является гармонической функцией угла поворота, можно утверждать, что эти ЭДС будут:  и
и  , где
, где  –наибольшее значение ЭДС роторной обмотки при совпадении ее оси с осью обмотки возбуждения. Поток
–наибольшее значение ЭДС роторной обмотки при совпадении ее оси с осью обмотки возбуждения. Поток  . Взяв отношения ЭДС, получим значения коэффициентов трансформации:
. Взяв отношения ЭДС, получим значения коэффициентов трансформации:
 .
. ;
; 
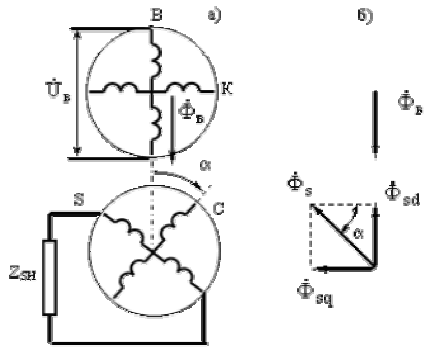
 – ЭДС синусной обмотки при нагрузке. Возникнет поток синусной обмотки
– ЭДС синусной обмотки при нагрузке. Возникнет поток синусной обмотки  , ось которого совпадает с осью синусной обмотки (рис.6.2). Разложим его на продольную
, ось которого совпадает с осью синусной обмотки (рис.6.2). Разложим его на продольную  и поперечную
и поперечную  составляющие:
составляющие:  и
и  .
. . Он наведет в синусной обмотке ЭДС взаимной индуктивности, практически равную ЭДС при холостом ходе
. Он наведет в синусной обмотке ЭДС взаимной индуктивности, практически равную ЭДС при холостом ходе
 и
и  – составляющие тока и индуктивного сопротивления обмотки по оси q. Подставляя значение тока
– составляющие тока и индуктивного сопротивления обмотки по оси q. Подставляя значение тока  , получим
, получим



 и
и  .
. и
и  комплексные числа, можно говорить об амплитудной и фазовой погрешностях.
комплексные числа, можно говорить об амплитудной и фазовой погрешностях. , где
, где  – сопротивление источника. Поскольку
– сопротивление источника. Поскольку  , условие симметрии выливается в равенство
, условие симметрии выливается в равенство  . Если принять, что внутренне сопротивление мощного источника равно нулю
. Если принять, что внутренне сопротивление мощного источника равно нулю  , то и
, то и  , т.е. первичное симметрирование сводится к замыканию компенсационной обмотки накоротко.
, т.е. первичное симметрирование сводится к замыканию компенсационной обмотки накоротко. , направленный встречно потоку
, направленный встречно потоку 

 (рис. 6.5,а). Его сущность состоит в том, что поперечные составляющие потоков
(рис. 6.5,а). Его сущность состоит в том, что поперечные составляющие потоков  всегда направлены встречно и при правильном выборе
всегда направлены встречно и при правильном выборе 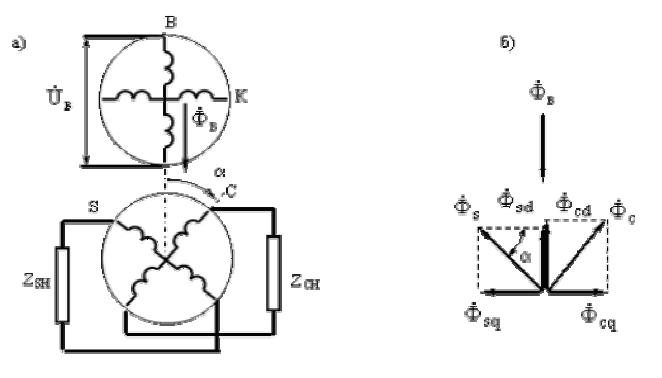
 или
или


 было равно сопротивлению нагрузки
было равно сопротивлению нагрузки  .
.

 и
и  – сопротивление роторной обмотки и сопротивление нагрузки, поскольку
– сопротивление роторной обмотки и сопротивление нагрузки, поскольку  =
=  и
и  .
.
 .
.
 , устанавливается некая средняя скорость, однозначно определяемая относительной продолжительностью включения (скважностью)
, устанавливается некая средняя скорость, однозначно определяемая относительной продолжительностью включения (скважностью)  , где
, где  – длительность импульса напряжения;
– длительность импульса напряжения;  – период.
– период.
 и паузы
и паузы  при постоянном периоде
при постоянном периоде  .
. .
. и тока якоря
и тока якоря  при относительно больших нагрузках. При малых нагрузках ток двигателя становится небольшим и появляются периоды, когда при закрытом электронном ключе ток якоря уменьшается до нуля. Говорят, наступил режим прерывистых токов (рис.2.8, б). Механические характеристики приобретают перелом и становятся похожими на характеристики двигателя при регулировании реостатом в цепи якоря. В общем случае они имеют вид, представленный на рис. 2.9. Зона, соответствующая прерывистым токам, ограничена пунктирной линией.
при относительно больших нагрузках. При малых нагрузках ток двигателя становится небольшим и появляются периоды, когда при закрытом электронном ключе ток якоря уменьшается до нуля. Говорят, наступил режим прерывистых токов (рис.2.8, б). Механические характеристики приобретают перелом и становятся похожими на характеристики двигателя при регулировании реостатом в цепи якоря. В общем случае они имеют вид, представленный на рис. 2.9. Зона, соответствующая прерывистым токам, ограничена пунктирной линией.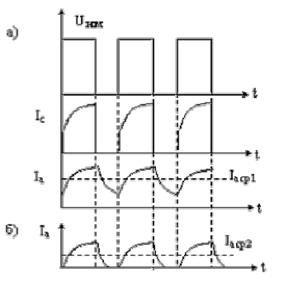
 и тока якоря
и тока якоря  при больших нагрузках (а) и тока якоря при
при больших нагрузках (а) и тока якоря при
 ,
, ;
;  ;
;  .
. ,
,  . В этом случае постоянная времени, а следовательно и быстродействие, не зависят от коэффициента сигнала.
. В этом случае постоянная времени, а следовательно и быстродействие, не зависят от коэффициента сигнала. . Постоянная времени будет
. Постоянная времени будет  . Видно, что при полюсном управлении быстродействие в сильной степени зависит от коэффициента сигнала, ухудшаясь с его уменьшением.
. Видно, что при полюсном управлении быстродействие в сильной степени зависит от коэффициента сигнала, ухудшаясь с его уменьшением.


