
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Графічний метод розв’язання задач цілочислового програмуванняСодержание книги
Поиск на нашем сайте
Спочатку знайдемо оптимальний план задачі (4.5) – (4.7). Для цього побудуємо область допустимих розв’язків SABC, градієнт grad
Рисунок 4.3 – Оптимальне значення задачі лінійного програмування (4.5) – (4.7) досягається в точці В(3.4; 2.22), найближча до неї точка т. F(3, 2), але оптимальне значення цілочислової задачі (4.5) – (4.8) досягається в точці G(4; 1)
Знаходження оптимального розв’язку цілочислової задачі принципово нічим не відрізняється від наведеного алгоритму. З урахуванням додаткової умови (4.8) область допустимих значень перетворюється до області DEFGH, крайньою точкою на виході з якої є т. G(4, 1). На рис. 4.3 крайнє положення опорної лінії на виході з області DEFGH зображено штриховою лінією, що паралельна лінії MN. Розглянемо особливості графічного розв’язання задач цілочислового лінійного програмування в середовищі Maple на прикладі наступної задачі. Приклад 4 Знайти найбільше значення функції > restart: z:= 41*x[1] + 33*x[2]: ‘z’=z,`->`*max;
за умови, що її аргументи пов’язані співвідношеннями > linear_constraints:=map(y->subs(x1=x[1], x2=x[2], y), [133835*x1-4529360*x2<=-561587, -55167*x1-2182400*x2<=-1084571, -103761*x1-378664*x2<=-515601, -917135*x1-340041*x2<=-2475628, 55775*x1+557469*x2<=2655572, x1>=0, x2>=0]): for i from 1 to nops(linear_constraints) do op(i,linear_constraints) od;
Невідомі можуть приймати тільки цілі значення: Розв’язання. Так само, як це ми робили і для нецілочислової задачі, будуємо область допустимих розв’язків – за допомогою команди plots[inequal] (цей графік присвоєно змінній Maple під ім’ям g10), градієнт – за допомогою команди my_arw та опорну лінію MN (g20): > x1:=-5:x2:=40: y1:=-1.0:y2:=6: g10:=plots[inequal]({op(linear_constraints)}, x[1]=x1..x2, x[2]=y1..y2, optionsfeasible=(color=red), optionsopen=(color=blue, thickness=2), optionsclosed=(color=black, thickness=2), optionsexcluded=(color=cyan)): my_arw:=(x, y, l, w)->if add(type(args[k], numeric), k=1..nargs)=4*true then[[0, 0], [x, y]], [[x-x*l-y*l*w, -(-y^2+y^2*l-x^2+x^2*l+x*(x-x*l-y*l*w))/y], [x, y]], [[x-x*l+y*l*w, -(-y^2+y^2*l-x^2+x^2*l+x*(x-x*l+y*l*w))/y], [x, y]] fi: c1:=3*4.1: c2:=3*3.3: x1_d:=10: y1_d:=2: g20:=plot([my_arw(c1, c2, 0.15, 0.2), y1_d-(c1/c2)*(x[1]-x1_d)], x[1]=x1..15, x[2]=y1..12, color=[blue$3, black], thickness=[4$3, 2], scaling=CONSTRAINED): g30:=PLOT(TEXT([35, 3], ’C’, ALIGNLEFT, FONT(TIMES, ITALIC, 14)), TEXT([7, 9],’M’, ALIGNLEFT, FONT(TIMES, ITALIC, 14)), TEXT([14, -1],’N’, ALIGNLEFT, FONT(TIMES, ITALIC, 14))): plots[display]([g10, g20, g30], scaling=CONSTRAINED, view=[ 4..37, 0.5..10]);
Координати градієнта помножили на 0.3: Із отриманого графіка видно, що оптимальним планом нецілочислової задачі є координати т. С, точні значення яких в даному випадку нам не потрібні. Для того, щоб визначити оптимальний план цілочислової задачі, потрібно збільшити частину області допустимих значень навколо т. С. Крім того потрібно якимось чином виділити на графіку точки з цілочисловими координатами. Це можна зробити за допомогою сітки, утвореної горизонтальними та вертикальними прямими з цілочисловими координатами. Для побудови такої сітки автором створена допоміжна процедура my_drid(Xn, Ym), яка формує команду побудови горизонтальних та вертикальних прямих, координати яких задані списками Xn, Ym. Для регулювання області відображення графіка користуватимемося опцією view=[25..37, 0..4] команди plots[display]. > x1_d:=35.43:y1_d:=1.24: my_drid:=(xn::list, yn::list)->plot([yn[‘i’] $ ‘i’ = 1..nops(yn),[xn[‘i’], t, t=yn[1]..yn[nops(yn)]] $ ‘i’ = 1..nops(xn)], xn[1]..xn[nops(xn)], yn[1]..yn[nops(yn)], color=black, linestyle= [3$nops(yn), 4$nops(xn)], scaling=CONSTRAINED): g40:=plot([[[x1_d, y1_d]], y1_d-(c1/c2)*(x[1]-x1_d)], x[1]=x1..x2, x[2]=y1..y2, color=black, style=[point,line], symbol=circle, symbolsize=25, linestyle=3, thickness=2, scaling=CONSTRAINED): plots[display]([g10, g20, g40,my_drid([$ 25..37], [$ 0..4])], view=[25..37,0..4], scaling=CONSTRAINED); Зменшуємо діапазон виведення графіка (view=[27..33, 0..3]) та зсуваємо у відповідну область опорну лінію (x1_d:=31:y1_d:=1.5:) > x1_d:=31:y1_d:=1.5: g60:=plot([y1_d-(c1/c2)*(x[1]-x1_d)], x[1]=x1..x2, x[2]=y1..y2, color=black, style=[line], symbol=circle, symbolsize=25, linestyle=3, thickness=2, scaling=CONSTRAINED): plots[display]([g10, g20, g60, my_drid([$ 25..37], [$ 0..4])], view=[27..33, 0..3], scaling=CONSTRAINED);
Із отриманого графіка видно, що області допустимих значень не належать точки з цілочисловими координатами, абсциси яких дорівнюють 32 і більше, а ординати 3 і більше. Добре видно, що області допустимих значень належить т. (28; 1). Отже, знову зменшуємо діапазон виведення графіка (view=[28..31, 0.7..2.2])
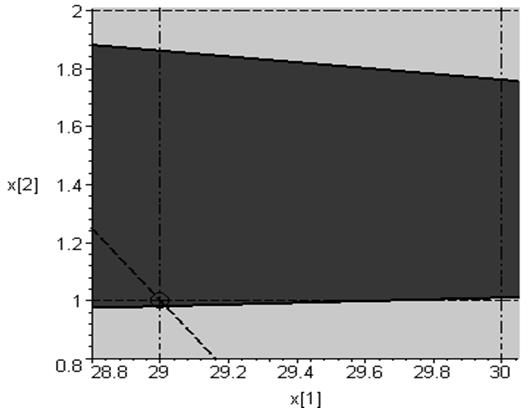
Із графіка видно, що оптимальним планом є координати т. (30; 1), якщо ця точка належить області допустимих значень, або координати т. (29; 1) – в протилежному випадку. Перевіримо належність т. (30; 1) до області допустимих значень: > plots[display]([g10, g20, g60, my_drid([$ 25..37], [$ 0..4])], view=[29.9..30.9, 0.97..1.1], scaling=CONSTRAINED);
Очевидно, що т. (30, 1) знаходиться поза областю допустимих значень. Отже, > x1_d:=29:y1_d:=1: g50:=plot([[[x1_d, y1_d]], y1_d-(c1/c2)*(x[1]-x1_d)], x[1]=x1..x2, x[2]=y1..y2, color=black, style=[point, line], symbol=circle, symbolsize=25, linestyle=3, thickness=2, scaling=CONSTRAINED): plots[display] ([g10, g20, g50, my_drid([$25..37], [$0..4])], view=[28.8..30.05, 0.8..2.01], scaling=CONSTRAINED);
Оптимальний план >‘z[max]’=subs(x[1]=29, x[2]=1, z);
Для того, щоб наведені в цьому прикладі програми були доступні в DEMO-Maple, потрібно тільки вилучити опцію symbolsize=25 команди plot. Ми розглянули варіанти, що піддаються геометричній інтерпретації. Із збільшенням розмірності процес розв’язання цілочислової задачі ускладнюється.
|
||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 160; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.128.17 (0.009 с.) |

 та опорну лінію MN, перпендикулярну до градієнта (рис. 4.3). Пересуваючи опорну лінію паралельно собі в напрямі градієнта, визначаємо крайню точку В на виході з області допустимих значень SABC.
та опорну лінію MN, перпендикулярну до градієнта (рис. 4.3). Пересуваючи опорну лінію паралельно собі в напрямі градієнта, визначаємо крайню точку В на виході з області допустимих значень SABC.


 ,
, ,
, ,
, ,
, ,
, ,
, .
. – цілі числа.
– цілі числа.
 c1:=3*4.1:c2:=3*3.3: – для того, щоб вектор помістився на графіку. В рівнянні опорної лінії
c1:=3*4.1:c2:=3*3.3: – для того, щоб вектор помістився на графіку. В рівнянні опорної лінії  точку допустимої області
точку допустимої області  взято т. (10;2). Графічна структура g30 містить буквені позначення M, N, C.
взято т. (10;2). Графічна структура g30 містить буквені позначення M, N, C.



 , оптимальне значення цільової функції
, оптимальне значення цільової функції .
.


