
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Типовые алгоритмы управления.Содержание книги
Поиск на нашем сайте
Алгоритм управления, его структура и параметры зависят не только от задачи управления, но и от того объекта, которым предстоит управлять. Многообразие объектов управления, не поддающихся типизации, отсутствие единой четкой классификации задач управления затрудняют классификацию алгоритмов управления. Для упрощенного представления можно выделить среди алгоритмов управления две наиболее обобщенные и укрупненные группы: алгоритмы управления состоянием и сменой состояний. К первым могут быть отнесены алгоритмы поддержания заданного рационального либо предварительно рассчитанного оптимального значения технологического параметра. Они получили название алгоритмов стабилизации или регулирования. Среди них выделяют регулирование по отклонению координаты и регулирование по возмущению. К этой группе могут быть отнесены также алгоритмы статической оптимизации, когда управляющее устройство автоматически осуществляет поиск такого сочетания значений технологических параметров, при котором достигается наилучшее (оптимальное) значение некоторого критерия качества функционирования объекта управления. Если для достижения оптимального критерия качества необходимо задавать недопустимые значения параметров объекта управления, то формируются предельно допустимые алгоритмы, обеспечивающие наибольшее приближение к оптимуму. К алгоритмам второй группы следует отнести алгоритмы отработки заданной рациональной или заданной оптимальной траектории - алгоритмы программно-следящего управления. К ним также могут быть отнесены алгоритмы отработки заданной рациональной или оптимальной дискретной последовательности смены технологических операций, образующей технологический цикл. В отличие от перечисленных алгоритмы динамической оптимизации обеспечивают автоматический выбор оптимальной траектории или ее формирование, коррекцию в процессе отработки в зависимости от меняющихся условий таким образом, чтобы сохранить наилучшее значение критерия качества функционирования. Наиболее современным и перспективным является оптимальное управление, которое хотя и является обычно наиболее трудно реализуемым, но зато дает наибольший технико-экономический эффект. Решение задач оптимального управления по существу стало реальным в связи с применением в системах автоматизации микропроцессоров и мини-ЭВМ.
Основными функциями типового регулятора являются усиление сигнала рассогласования и формирование корректирующих сигналов от ошибки, ее производной и интеграла ошибки. Различают несколько разновидностей регуляторов в зависимости от алгоритма формирования корректирующего сигнала: пропорциональный (П-регулятор), интегральный (И-регулятор), пропорционально-интегральный (ПИ-регулятор), пропорционально-дифференциальный (ПД-регулятор), пропорционально-интегрально-дифференциальный (ПИД-регулятор). Опишем характеристики и параметры настройки типовых регуляторов. • П-регулятор имеет статическую линейную характеристику, печаточная функция его равна кр. П -регулятор безынерционно реагирует на ступенчатое воздействие. • И-регулятор имеет передаточную функцию вида где Т — постоянная времени интегрирования. На входной единичный ступенчатый сигнал И-регулятор реагирует линейным сигналом, причем за время Т выходной сигнал достигает единицы. • ПИ-регулятор имеет двухпараметрическую передаточную функцию вида
где кр, Ти — коэффициент передачи и время изодрома соответственно. ПИ-регулятор является астатическим регулятором, он совмещает в себе свойства П- и И-регуляторов, его реакция на единичное воздействие представляется мгновенным скачком величины кр и последующим линейно растущим сигналом с наклоном Ти/кр. • ПД -регулятор имеет передаточную функцию вида
где к, Т — коэффициент передачи и время упреждения соответственно, ПД-регулятор в стационарном режиме ведет себя как пропорциональное звено, но при изменении входного сигнала вырабатывает дополнительную составляющую, соответствующую производной от входного сигнала. Переходная функция регулятора приведена на рис. 5.3, а.
• ПИД -регулятор имеет трехпараметри-ческую передаточную функцию вида
где кр, Г, ТИ — коэффициент передачи, время упреждения и время изодрома соответственно. Структурная модель ПИД-регулятора может быть представлена и в мультипликативной форме
Переходная функция регулятора приведена на рис. 5.3, б. Логарифмическая амплитудная частотная характеристика ПИД-регулятора имеет симметричный вид относительно своей среднечастотной части, наклон в низкочастотной части составляет —20 дБ/дек и 20 дБ/дек в высокочастотной части характеристики, средние частоты подавляются.
(про типовые алгоритмы регулирования в вопросе 68)
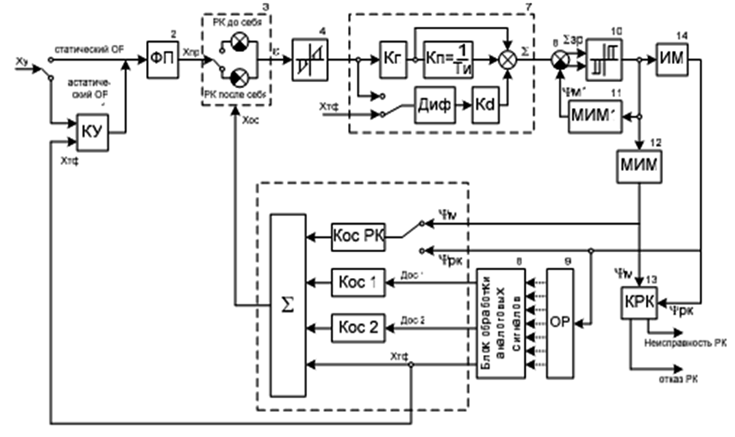
Цифровые регуляторы, входящие в состав СЦАР (система цифрового авторегулирования), обеспечивают поддержание регулируемых параметров в заданных пределах и с заданной степенью точности (в соответствии с техническими требованиями к алгоритмическому обеспечению СЦАР) с учетом сложной обратной связи регуляторов, в состав которой входят влияющие на объект регулирования другие технологические параметры, не являющиеся регулируемыми. Объектами регулирования СЦАР являются технологические системы, оборудование в объеме машзала турбоустановки К-1000-60/1500-2. Реализация систем регулирования технологическими параметрами в соответствии с данной структурной схемой обеспечивает регулирование «до себя» и «после себя» для статических и астатических объектов регулирования по П-. ПИ-. ПИД- законам управления с учетом охвата исполнительного механизма отрицательной обратной связью. Структурная схема регуляторов, реализуемых с помощью системы автоматического регулирования турбинного отделения, приведена на структурной схеме, приведенной на рисунке. Схема является унифицированной для всех систем цифрового авторегулирования.
Рис. 1. – Структурная схема регулятора
На структурной схеме обозначены: 1 - корректор уставки (КУ); 2 - формирователь программы (ФП); 3, 8 - формирователи рассогласования; 4 - формирователь зоны нечувствительности; 5 - формирователь обратной связи; 6 - блок обработки аналоговых сигналов; 7 - формирователь закона регулирования; 9 - объект регулирования; 10 - релейный элемент; 11, 12 - модели исполнительного механизма; 13 - блок контроля регулирующего клапана; 14 - исполнительный механизм.
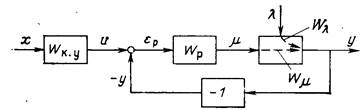
Конкретный вид алгоритмов функционирования отдельных блоков системы управления, структура которой приведена на рис.1, может быть довольно разнообразным.
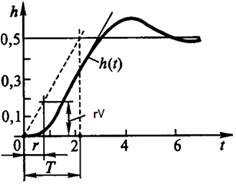
Рис.1. Особенностью реального управления многими инерционными технологическими процессами, такими как процесс регулирования давления, расхода, уровня, температуры, является апериодичность переходных характеристик. Общий вид экспериментальных переходных кривых таких процессов характеризуется тремя основамипараметрами: Т, τ, V — постоянной времени, временем отставания и скоростью нарастания соответственно, а простейшей обобщенной моделью является модель
1-й множет.-аппериодич. звено; 2-й множет. –запазд. звено.
На практике для управления такими процессами при Т > (5 + 10) r алгоритмы функционирования регуляторов, как правило, выбираются в виде типового ПИД-алгоритма и его модификаций. Расчет параметров регулятора достаточно прост и практически табулирован, практика настройки системы с ПИД-регулятором доведена до простейших приемов, в чем можно убедиться, используя метод Циглера—Никольса. В этом методе используют только два параметра r, V, и он тем точнее, чем больше величина третьего параметра Т. Правило настройки регулятора состоит из двух шагов: • на первом шаге регулятор рассматривают как пропорциональный и увеличивают коэффициент передачи прямого тракта до предельного значения к*, когда система выходит на границу устойчивости и совершает незатухающие колебания с периодом • на втором шаге определяют параметры регулятора по правилу: кр = 0,5к* для П-регулятора; кр = 0,45 к* Тн = 0,83 T * для ПИ-регулятора; кр = 0,6к*, Тн = 0,5 T *, TД = 0,1257* для ПИД-регулятора. Показатели к*, Т*, по которым определяют параметры настройки регуляторов, находят расчетным путем с использованием Параметры регулятора могут быть вычислены и по экспериментально снятой кривой переходного процесса, по которой графически определяют τ, Т, V:
Системы регулирования не предназначены для выполнения функций быстрой отработки относительно больших изменений заданного значения управляемой величины. Для управления системой необходимо описать не только объект, но и технологический цикл.
|
||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 1373; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.21.237 (0.008 с.) |







 — частотного годографа Найквиста. В самом деле, предельный коэффициент усиления к* и период Т* =
— частотного годографа Найквиста. В самом деле, предельный коэффициент усиления к* и период Т* =  однозначно определяются из условия W(jω*) = — 1, когда частотная характеристика разомкнутой части системы проходит через точку —1 на действительной оси.
однозначно определяются из условия W(jω*) = — 1, когда частотная характеристика разомкнутой части системы проходит через точку —1 на действительной оси.



