Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Задачи статистического и динамического анализа сауСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Задачи статистического и динамического анализа САУ Анализ работы системы автоматического регулирования и анализ работы ее элементов выполняется для двух возможных состояний: статического и динамического. Уравнение статики элемента: · устанавливает зависимость выходной координаты от входных координат, представляющих собой внешние по отношению к элементу возмущения. · позволяет определить связь между выходной координатой и конкретным внешним возмущением при различных равновесных режимах работы. При статическом анализе системы автоматического регулирования изучают условия обеспечения равновесных (установившихся) состояний, а также выявляют статическую характеристику. Такой анализ позволяет оценить статическую ошибку в поддержании заданного значения регулируемого параметра (степень неравномерности). Выполнение условий работы системы по заданной степени неравномерности и выбору диапазона регулируемых режимов проверяется статическим расчетом. Динамический анализ системы автоматического регулирования связан с исследованием ее поведения при нарушении равновесного режима. Предметом исследования в этом случае является процесс изменения регулируемого параметра во времени — так называемый переходный процесс cp = cp (t); X = X (t) Нарушение равновесного режима может сопровождаться возвращением системы в исходное состояние, переходом ее в новое равновесное состояние, характеризуемое новым значением регулируемого параметра (в статических системах), или непрерывным удалением от первоначального состояния. В первом и втором случаях система является устойчивой, в третьем — неустойчивой. Поэтому первой задачей динамического анализа работы систем автоматического регулирования является оценка системы с точки зрения устойчивости. Вторая задача динамического анализа связана с выявлением качественных показателей переходного процесса (время переходного процесса, максимальное отклонение регулируемой величины от заданного значения, колебательность процесса и т. п.). Третьей задачей анализа является определение влияния параметров элементов, образующих систему автоматического регулирования, на устойчивость и на качественные показатели переходного процесса. Уравнения движения элементов системы автоматического регулирования являются линейными дифференциальными уравнениями. Линеаризация связей в элементах системы, обеспечивающая получение линейных дифференциальных уравнений собственно системы, — это основной метод, упрощающий в допустимых пределах решение задач устойчивости и качества переходных процессов. Нахождение дифференциальных уравнений элементов является основой для получения дифференциального уравнения системы автоматического регулирования. Решение дифференциального уравнения системы регулирования позволяет найти изменение регулируемой величины во времени, т. е. переходный процесс. Знание переходного процесса дает наиболее полное представление о работе системы автоматического регулирования. Дифференциальные уравнения движения элементов и систем автоматического регулирования записываются в форме, при которой левая часть уравнения содержит выходную величину и ее производные, а правая часть — соответствующие входные возмущения.
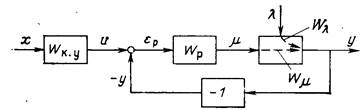
Способы записи алгоритмов Используются следующие способы записи алгоритмов: Словесный; формульный; табличный; операторный; графический; язык программирования. При словесном способе записи содержание последовательных этапов алгоритма описывается в произвольной форме на естественном языке. Рис. 1. – Структурная схема регулятора
На структурной схеме обозначены: 1 - корректор уставки (КУ); 2 - формирователь программы (ФП); 3, 8 - формирователи рассогласования; 4 - формирователь зоны нечувствительности; 5 - формирователь обратной связи; 6 - блок обработки аналоговых сигналов; 7 - формирователь закона регулирования; 9 - объект регулирования; 10 - релейный элемент; 11, 12 - модели исполнительного механизма; 13 - блок контроля регулирующего клапана; 14 - исполнительный механизм.
Конкретный вид алгоритмов функционирования отдельных блоков системы управления, структура которой приведена на рис.1, может быть довольно разнообразным.
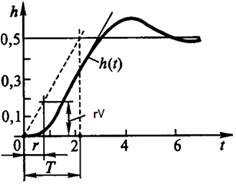
Рис.1. Особенностью реального управления многими инерционными технологическими процессами, такими как процесс регулирования давления, расхода, уровня, температуры, является апериодичность переходных характеристик. Общий вид экспериментальных переходных кривых таких процессов характеризуется тремя основамипараметрами: Т, τ, V — постоянной времени, временем отставания и скоростью нарастания соответственно, а простейшей обобщенной моделью является модель
1-й множет.-аппериодич. звено; 2-й множет. –запазд. звено.
На практике для управления такими процессами при Т > (5 + 10) r алгоритмы функционирования регуляторов, как правило, выбираются в виде типового ПИД-алгоритма и его модификаций. Расчет параметров регулятора достаточно прост и практически табулирован, практика настройки системы с ПИД-регулятором доведена до простейших приемов, в чем можно убедиться, используя метод Циглера—Никольса. В этом методе используют только два параметра r, V, и он тем точнее, чем больше величина третьего параметра Т. Правило настройки регулятора состоит из двух шагов: • на первом шаге регулятор рассматривают как пропорциональный и увеличивают коэффициент передачи прямого тракта до предельного значения к*, когда система выходит на границу устойчивости и совершает незатухающие колебания с периодом • на втором шаге определяют параметры регулятора по правилу: кр = 0,5к* для П-регулятора; кр = 0,45 к* Тн = 0,83 T * для ПИ-регулятора; кр = 0,6к*, Тн = 0,5 T *, TД = 0,1257* для ПИД-регулятора. Показатели к*, Т*, по которым определяют параметры настройки регуляторов, находят расчетным путем с использованием Параметры регулятора могут быть вычислены и по экспериментально снятой кривой переходного процесса, по которой графически определяют τ, Т, V:
Системы регулирования не предназначены для выполнения функций быстрой отработки относительно больших изменений заданного значения управляемой величины. Для управления системой необходимо описать не только объект, но и технологический цикл.
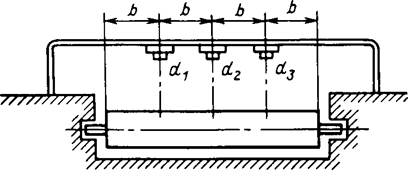
Таблицы истинности. В качестве комбинационных (как наиболее простого вида) моделей, в которых дальнейший ход цикла определяется состоянием входов и выходов объекта управления, часто используются таблицы истинности, отражающие однозначное соответствие дискретных состояний входов и выходов объекта управления. Активное (включенное) или пассивное (отключенное) состояние исполнительного элемента (входа) или уровень контролируемого выхода (высокий, низкий) может обозначаться любыми символами. Обычно для этих целей используются дискретные величины 1 и 0. При числе входов п возможны N=2n сочетаний комбинаций их единичного и нулевого уровней. В таблице истинности их удобно располагать в виде кодов натурального ряда двоичных чисел, т.е. чередуя 0 и 1 для первого входа через одно состояние, для второго -через два, для третьего - через четыре и т.д. Пример. Произвести сортировку деталей на три группы по размеру, равному b, 2b и больше ЗЬ, открыв заслонки бункеров-накопителей, предназначенных для отбора деталей каждого типа. Контроль размеров деталей можно осуществить тремя датчиками dx-d3, установленными (рис.1.) поперек роликового транспортера. Обозначив бункеры.В1 ,В2 и В3, выделим следующие ситуации (табл.1.): 1) идет деталь размера b - перекрыт один из датчиков (d, или d2, или d3), открыт бункере, (такты 4,2, 1); 2) идет деталь 2b - перекрыты два датчика (d1, d2 или d2, d3), открыт бункер В2 (такты 6,3); 3) идет деталь размером более 3b - перекрыты все три датчика, открыт бункер В3 (такт 7). Таблица истинности составляется для всех возможных комбинаций командных датчиков. Число таких комбинаций равно N = 2n = 8, где п = 3 - число командных входов (число датчиков). Рис. 1. Установка датчиков для контроля размеров детали Таблица.1. Номера ком бинаций / Состояние (тактов) входов выходов
Незаполненные клетки состояний выходов (такт 5) соответствуют нереальной ситуации, когда деталь перекроет датчики d1 и d3 и не перекроет d2; она может возникнуть лишь в результате неисправности датчика d2. Эти клетки заполняются нулями для предотвращения аварийной ситуации (все бункеры закрыты, звучит сигнал).
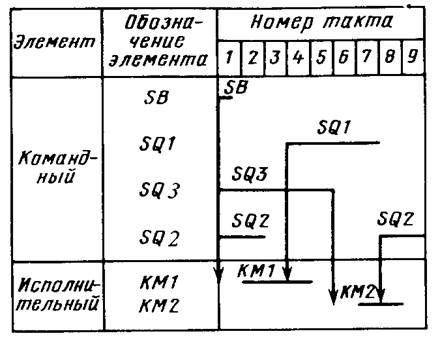
Цикла. Циклограмма. Одна и та же комбинация входов в данном такте может вызвать переход в разные новые состояния в зависимости от того, каким было предшествующее состояние. Поэтому в модели должны быть отражены не только данный такт, но и предыстория. В простейшем случае применяются циклограммы, в которых состояния отражают условным изображением включенного или отключенного исполнительного элемента в виде наличия или отсутствия линии. При большом числе состояний применяются таблицы состояний и графы. Циклограмма представляет собой ряд горизонтальных строк, равных числу командных и исполнительных элементов. Строки условно разбиты на отрезки, число которых равно числу элементарных технологических тактов. Включенное состояние элемента на строке обозначается сплошной линией, отключенное — отсутствием ее. Вертикальными линиями на циклограммах показана "передача управления" -причинно-следственные связи между командными и исполнительными элементами. Когда элемент включен, совокупность тактов называется периодом включения, а когда отключен - периодом отключения. Такт, предшествующий периоду включения, называется включающим, а периоду отключения — отключающим. Пример.1.Циклограмма работы грузового подъемника (рис.1). - Грузовой подъемник с тележкой от подачи кратковременной команды кнопкой SB (пуск) идет вверх [кнопка SB включает контактор "Вперед" КМ1 (SB→КМ1), после чего отключается (такт 1). - В начале движения отключается нижний конечный выключатель SQ2 (такт 2). - После достижения крайнего верхнего положения кабина воздействует на верхний конечный выключатель SQ1, кот.дает команду на отключение КМ1 (такт 3) ,(SQ1 →КМ1). - Контактор КМ1 отключается (такт 4). - После выката тележки отключается конечный выключатель SQ3 (такт 5) и включается контактор "Назад" КМ2, подъемник идет вниз (такт 6), (SQ3→ КМ2), отключается SQ1 (такт 7). После воздействия внизу на нижний конечный выключатель SQ2 отключается КМ2 (такт 8), (SQ2→КМ2), кабина останавливается (такт 9).
Рис. 2. Реализация базовых логических функций на элементах И —НЕ: а — инверсия; б — логическое произведение; в — логическая сумма.
Триггеры. Триггер – это стандартная ячейка ОЗУ для хранения информации с емкостью 1 бит. Триггер – логический элемент, обладающий двумя устойчивыми состояниями. RS-триггер.
Одновременная подача единичных сигналов на оба входа RS- триггера не допускается. При наличии на обоих входах RS -триггера нулевых сигналов его состояние не изменяется.
Синхронный RS-триггер. Синхронный триггер переключается только при одновременной подаче единичных сигналов на один из информационных входов и на вход С (Clock).
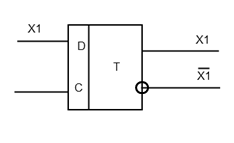
D – триггер. (Delay — задержка). Состояние D-триггера принимает то значение, которое имеется на входе D: при D = 1 получим Q= 1, а при D= 0 получим Q = 0, но только при условии, что С= 1. При С= 0 состояние выходов D -триггера не изменяется. Это свойство Д-триггера можно использовать для организации считывания информации со входов управляющего устройства. Счетный триггер (Т- триггер)
J К- триггер.
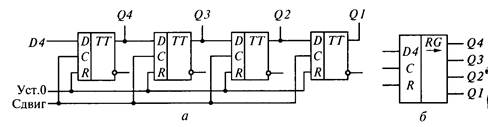
Регистры. Триггеры, используемые в ОЗУ, применяются не по одному, а группами, называемыми регистрами. Регистр — это электронное устройство, базирующееся на совокупности триггерных ячеек и предназначенное для хранения и преобразования помещенной в него информации, записанной в двоичном коде. По характеру выполняемых операций регистры принято подразделять на регистры хранения, регистры сдвига и счетные регистры (счетчики). 1) Рис. 5.14. Регистр хранения RG, построенный на D-триггерах: а — условное обозначение; 2) Регистры сдвига помимо приема, хранения и выдачи информации подобно регистрам хранения позволяют сдвигать записанную информацию, т.е. перемещать значения записанных битов информации от одной триггерной ячейки к другой, соседней, причем сдвиг информации производится одновременно во всех ячейках в одном направлении. Информация в такой регистр может поступать как в последовательном, так и в параллельном коде, а сдвиг информации производится подачей единичного импульса на вход сдвига. Вход сдвига организуется путем объединения всех тактовых входов регистра.
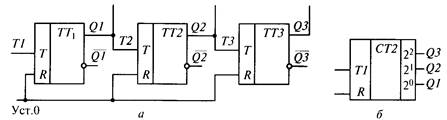
Рис. 5.15. Схема регистра сдвига (а) и его условное обозначение (б) 3) Счетные регистры, или счетчики, отличаются тем, что помимо функций записи, хранения и выдачи информации выполняют функцию счета поступающих на них импульсов с запоминанием результатов.
Рис. 5.16. Схема трехразрядного двоичного счетчика (а) и его условное обозначение (б) Принципы регулирования. Существуют два способа регулирования мощности станции: - электрическая мощность регулируется системой регулирования турбины, а технологические параметры регулируются системой регулирования реактора, т.е. режим следования реактора за турбиной; - мощность реактора регулируется регулятором нейтронной мощности, а технологические параметры регулируются системой регулирования турбины, т.е. режим следования турбины за реактором. Первый режим используется для нормальной работы на мощности, а второй режим в основном при малых уровнях мощности во время пуска и останова. Функции АРМ-5, РОМ.
Рис. 6-3. Структурные схемы регуляторов мощности реакторов ВВЭР. а — регулятор АРМ-4; б — регулятор АРМ-5.
На рис. 6-3,6 показана схема одного канала регулятора АРМ-5, установленного на АЭС Ловииза и намечаемого к установке на ряде других блоков. Сигнал отклонения давления пара второго контура от заданного формируется манометром 1, измерительным блоком 2, задатчикам 3 и поступает в релейный блок 8, вырабатывающий сигнал на перемещение регулирующих органов. Одновременно на релейный блок 8 через усилитель 7 поступает сигнал от ионизационной камеры 5. Усилитель 7 охвачен отрицательной обратной связью через интегратор 4 и ключ 9, который размыкается при появлении сигнала («больше» или «меньше») на выходе блока 8. Сигналы с блока 8 вместе с сигналами других каналов поступают на мажоритарную схему. В описываемом регуляторе также приближенно реализуется ПИ-закон регулирования давления за счет введения обратной связи через объект и блоки 7 и 4, выполняющие роль реального дифференциатора. При отсутствии отклонения давления медленный дрейф тока камер, как и в предыдущей схеме, не вызывает срабатывания блока 8. Разгрузка реактора при аварийном отключении ГЦН осуществляется самостоятельным регулятором.
Задачи статистического и динамического анализа САУ Анализ работы системы автоматического регулирования и анализ работы ее элементов выполняется для двух возможных состояний: статического и динамического. Уравнение статики элемента: · устанавливает зависимость выходной координаты от входных координат, представляющих собой внешние по отношению к элементу возмущения. · позволяет определить связь между выходной координатой и конкретным внешним возмущением при различных равновесных режимах работы. При статическом анализе системы автоматического регулирования изучают условия обеспечения равновесных (установившихся) состояний, а также выявляют статическую характеристику. Такой анализ позволяет оценить статическую ошибку в поддержании заданного значения регулируемого параметра (степень неравномерности). Выполнение условий работы системы по заданной степени неравномерности и выбору диапазона регулируемых режимов проверяется статическим расчетом. Динамический анализ системы автоматического регулирования связан с исследованием ее поведения при нарушении равновесного режима. Предметом исследования в этом случае является процесс изменения регулируемого параметра во времени — так называемый переходный процесс cp = cp (t); X = X (t) Нарушение равновесного режима может сопровождаться возвращением системы в исходное состояние, переходом ее в новое равновесное состояние, характеризуемое новым значением регулируемого параметра (в статических системах), или непрерывным удалением от первоначального состояния. В первом и втором случаях система является устойчивой, в третьем — неустойчивой. Поэтому первой задачей динамического анализа работы систем автоматического регулирования является оценка системы с точки зрения устойчивости. Вторая задача динамического анализа связана с выявлением качественных показателей переходного процесса (время переходного процесса, максимальное отклонение регулируемой величины от заданного значения, колебательность процесса и т. п.). Третьей задачей анализа является определение влияния параметров элементов, образующих систему автоматического регулирования, на устойчивость и на качественные показатели переходного процесса. Уравнения движения элементов системы автоматического регулирования являются линейными дифференциальными уравнениями. Линеаризация связей в элементах системы, обеспечивающая получение линейных дифференциальных уравнений собственно системы, — это основной метод, упрощающий в допустимых пределах решение задач устойчивости и качества переходных процессов. Нахождение дифференциальных уравнений элементов является основой для получения дифференциального уравнения системы автоматического регулирования. Решение дифференциального уравнения системы регулирования позволяет найти изменение регулируемой величины во времени, т. е. переходный процесс. Знание переходного процесса дает наиболее полное представление о работе системы автоматического регулирования. Дифференциальные уравнения движения элементов и систем автоматического регулирования записываются в форме, при которой левая часть уравнения содержит выходную величину и ее производные, а правая часть — соответствующие входные возмущения.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 713; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.102 (0.016 с.) |


 — частотного годографа Найквиста. В самом деле, предельный коэффициент усиления к* и период Т* =
— частотного годографа Найквиста. В самом деле, предельный коэффициент усиления к* и период Т* =  однозначно определяются из условия W(jω*) = — 1, когда частотная характеристика разомкнутой части системы проходит через точку —1 на действительной оси.
однозначно определяются из условия W(jω*) = — 1, когда частотная характеристика разомкнутой части системы проходит через точку —1 на действительной оси.
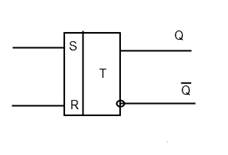 Простейшей триггерной ячейкой является асинхронный RS- триггер. Это ячейка с двумя входами (R и S) и двумя выходами: прямым выходом Q и инверсным выходом Q. По сигналу S = 1 (Set — установка) RS -триггер устанавливается в единичное состояние, которому соответствует Q = 1 и
Простейшей триггерной ячейкой является асинхронный RS- триггер. Это ячейка с двумя входами (R и S) и двумя выходами: прямым выходом Q и инверсным выходом Q. По сигналу S = 1 (Set — установка) RS -триггер устанавливается в единичное состояние, которому соответствует Q = 1 и  = 0. По сигналу R = 1 (Reset — сброс) RS -триггер сбрасывается в нулевое состояние, которому соответствует Q = 0 и
= 0. По сигналу R = 1 (Reset — сброс) RS -триггер сбрасывается в нулевое состояние, которому соответствует Q = 0 и 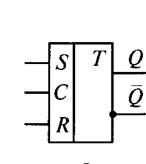
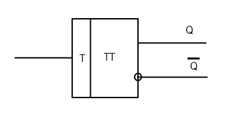 У Т -триггера имеется только один информационный (счетный) вход Т, который совпадает с тактовым входом С. После прохождения единичного импульса на счетном входе Т состояние триггера изменяется на противоположное.
У Т -триггера имеется только один информационный (счетный) вход Т, который совпадает с тактовым входом С. После прохождения единичного импульса на счетном входе Т состояние триггера изменяется на противоположное.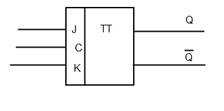 Универсальность J К -триггера заключается в том, что при подаче входных сигналов J = 1 или К= 1 раздельно он работает, как RS -триггер. Если же на вход К подавать инвертированный сигнал с входа J, то получится D -триггер. Апри подаче J = К= 1 одновременно он работает, как Т -триггер.
Универсальность J К -триггера заключается в том, что при подаче входных сигналов J = 1 или К= 1 раздельно он работает, как RS -триггер. Если же на вход К подавать инвертированный сигнал с входа J, то получится D -триггер. Апри подаче J = К= 1 одновременно он работает, как Т -триггер.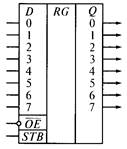 Регистры хранения реализуют только одну, общую для регистров всех типов, функцию хранения информации в двоичном коде. Типичные регистры хранения строятся на D-триггерах. Примером простейшего регистра хранения является совокупность D-триггеров в схеме, приведенной на рис. 5.12.
Регистры хранения реализуют только одну, общую для регистров всех типов, функцию хранения информации в двоичном коде. Типичные регистры хранения строятся на D-триггерах. Примером простейшего регистра хранения является совокупность D-триггеров в схеме, приведенной на рис. 5.12.