Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Использование методов подобия при проектировании гидропередач механизмов и машинСодержание книги
Поиск на нашем сайте
Характеристики гидродинамических передач, рассмотренные ранее, не могут быть получены с достаточной точностью теоретическим путем. Поэтому при проектировании механизмов и машин с такими передачами широко используются методы, основой которых являются положения теории подобия лопастных гидромашин. Они позволяют подбирать или определять характеристики и основные геометрические параметры гидродинамических передач, удовлетворяющие заданным условиям эксплуатации. При этом проектировании исходным материалом являются экспериментальные данные, полученные для рассматриваемой или подобной гидропередачи на подобном режиме работы. В подразд. 4.1 было отмечено, что для использования методов подобия наиболее важным является выбор критерия подобия. В качестве такого критерия для лопастных гидромашин выбирают коэффициент быстроходности (см. подразд. 16.6), который получают при условии подобия скоростей на границах геометрически подобных лопастных колес (на входе и на выходе). При рассмотрении гидродинамических передач мы имеем дело с системами лопастных колес (в гидромуфте их два, в гидротрансформаторе – не менее трех). Следовательно, указанное условие должно выражаться в подобии скоростей на стыках колес (см. точки 1, 2, 3 на рис. 17.1 и 17.3). Внешним проявлением этого подобия является передаточное отношение i, так как оно определяется соотношением наиболее важных скоростей. Поэтому для геометрически подобных гидродинамических передач критерием подобия режимов работы является передаточное отношение, т.е. i должно однозначно определять все остальные эксплуатационные параметры. При использовании методов подобия удобно разделить качественную и количественную стороны выбора гидропередачи для проектируемой машины или механизма. Тогда в процессе качественного анализа безразмерных характеристик гидропередач можно выбрать наиболее оптимальную характеристику из множества вариантов, приведенных в справочной литературе, а количественные расчеты позволят определить конструктивные и геометрические параметры этой гидропередачи. Расчетные формулы гидродинамических передач могут быть получены на основе уравнения (16.2), которое применимо для лопастных колес гидромуфт и гидротрансформаторов. При получении расчетных зависимостей учтем, что для геометрически подобных лопастных колес гидропередачи любой размер пропорционален основному геометрическому размеру D, за который принимают наибольший диаметр рабочей полости. Кроме того, будем считать, что любая скорость колеса пропорциональна его частоте вращения. Тогда из (16.2) получим
где λ – безразмерный коэффициент вращающего момента. Он не является постоянной величиной и может изменяться при изменении режима работы гидропередачи. Формула (17.7) связывает вращающий момент на валу лопастного колеса М гидропередачи с его угловой скоростью ω и наиболее важным геометрическим параметром D. Поэтому она является основной формулой при расчетах гидромуфт и гидротрансформаторов. Из (17.7) может быть получена также формула для вычисления мощности на валу колеса:
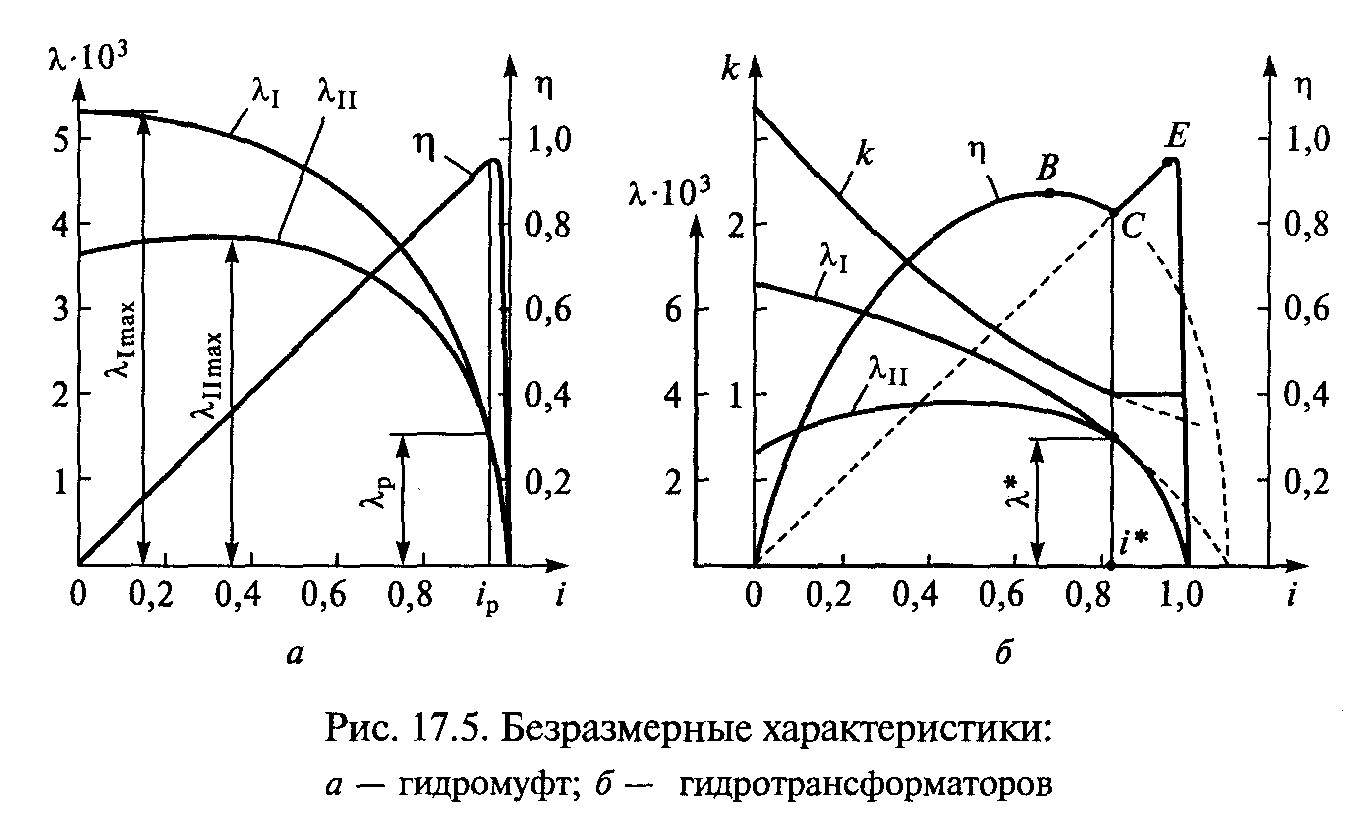
Для качественной оценки целесообразности использования гидропередачи в проектируемой машине применяют безразмерные графические характеристики, которые были рассмотрены в подразд. 17.2 и 17.3 (см. рис. 17.2 и 17.4). Однако некоторые из приведенных там зависимостей, а именно, зависимости моментов от передаточных отношений, не являются безразмерными. Наиболее неудобным является наличие размерной зависимости момента М1 на насосном колесе от передаточного отношения i. Зависимость М1 = f(i) целесообразно привести к безразмерному виду. Это достаточно просто сделать, потому что характеристики гидропередач строятся при постоянной частоте вращения насосного колеса. Тогда в соответствии с (17.7) вращающий момент на валу данного насосного колеса пропорционален коэффициенту момента, т.е. М1 ~ λ1. Следовательно, график зависимости λ1 = f(i) является безразмерной характеристикой, определяющей изменение
момента на насосном колесе (на ведущем валу гидропередачи). В большинстве случаев индекс «1» у коэффициента λ опускают, т.е. используют зависимость λ = f(i). для гидромуфты это не имеет значения, так как М1 = М2 = М и, следовательно, λ1 = λ2 = λ. В случае гидротрансформатора λ = f(i) является зависимостью, определяющей момент М1 на ведущем валу, а для характеристики момента М2 на ведомом валу дополнительно приводят зависимость для коэффициента трансформации k = f(i) [см. формулу (17.5)]. На рис. 17.5, а в качестве примера показаны безразмерные характеристики двух гидромуфт, причем зависимость η = f(i) у них одна и та же, а зависимости λ = f(i) – разные (λI и λII). Первая муфта имеет существенно переменный коэффициент момента во всем диапазоне передаточных отношений i. Максимальное значение коэффициента момента λI max (следовательно, и М max) у этой муфты при нулевом значении i. Такие гидромуфты используются при работе с двигателями внутреннего сгорания. Вторая муфта имеет гораздо меньшее изменение коэффициента момента λII в широком диапазоне изменения передаточного отношения i, но при i → 1 его значение резко падает. Коэффициент момента λII (следовательно, и М) у этой гидромуфты достигает максимума λII max при i ≠ 0. Такие гидромуфты в большинстве случаев используются при работе с асинхронными электродвигателями. Одним из параметров муфт, который имеет важное значение при проектировании машин и механизмов, является коэффициент перегрузки δ. Он определяется отношением максимального момента Мmax или коэффициента момента λmax к аналогичной величине на расчетном режиме (Мр или λр). В качестве расчетного режима принимается режим максимального КПД, т.е. при i = iр (см. рис. 17.5, а). Следовательно, коэффициент перегрузки
показывает, во сколько раз больше момент, который может передать гидромуфта от нагруженного вала на приводной двигатель, по сравнению с расчетным М р. Таким образом, δ определяет степень защиты, которую обеспечивает гидромуфта двигателю. Большинство современных гидромуфт имеют коэффициент перегрузки δ = 2…6. На рис. 17.5, б приведены безразмерные характеристики двух гидротрансформаторов, причем зависимости η = f(i) и k = f(i) у них одинаковы, а λ = f(i) – разные (λI и λII). Оба гидротрансформатора являются комплексными, т.е. при i = i* переходят на режим гидромуфты (см. сплошные линии). Однако такие гидротрансформаторы могут быть и некомплектными. Тогда их характеристики на рис. 17.5, б при i > i* будут соответствовать не сплошным, а штриховым линиям. Важным отличием этих гидротрансформаторов друг от друга является характер изменения коэффициента момента λ при изменении передаточного отношения i. Как было отмечено ранее, коэффициент λ пропорционален вращающему моменту на валу насосного колеса М1. При рассмотрении характеристик гидротрансформатора в подразд. 17.3 этот момент принимался постоянным. Однако в реальных условиях при ω1 = const, переменных ω2 и М2 обеспечить постоянное значение λ (или М1) у большинства гидротрансформаторов невозможно. Изменение λ (или М1) в зависимости от передаточного отношения i характеризует прозрачность гидротрансформатора. Гидротрансформаторы, у которых момент М1 на насосном колесе (следовательно, и λ) не зависит от момента М2 и угловой скорости ω2 турбинного колеса (или зависит незначительно), называются непрозрачными. Характеристика непрозрачною гидротрансформатора приведена на рис. 17.4, а. Такой гидротрансформатор не передает нагрузку с ведомого вала на двигатель. Например, если непрозрачный гидротрансформатор используется на автомобиле, то двигатель этого автомобиля будет работать на установившемся режиме независимо от дорожных условий. двигатель с таким гидротрансформатором не «чувствует дороги». Гидротрансформаторы с падающей зависимостью коэффициента момента [см. кривую λ1 = f(i) на рис. 17.5, б ] называются прозрачными. У таких гидротрансформаторов нагрузка с ведомого вала передается на двигатель. Например, у прозрачного гидротрансформатора на автомобиле при повышении сопротивления движению снижается i, что приводит к росту коэффициента λ1 (см. рис. 17. 5, б), т.е. увеличению момента на валу двигателя. двигатель переходит на режим с большей нагрузкой, т.е. «чувствует дорогу». Чем значительнее изменение λ = f(i), тем в большей степени передается нагрузка на двигатель. Прозрачность гидротрансформатора характеризуется коэффициентом прозрачности П, который равен отношению коэффициента момента λ0 (при i =0) к λ* (на режиме гидромуфты): П = λ0/ λ* (см. рис. 17.5, б). Гидротрансформаторы бывают также с обратной прозрачностью. Повышение нагрузки на ведомом валу такого гидротрансформатора приводит к снижению нагрузки на двигатель. Характеристика гидротрансформатора с обратной прозрачностью λii = f(i) также приведена на рис. 17.5, б. На этой характеристике видно, что при i < 0,3 происходит уменьшение коэффициента λii, а следовательно, и момента. При проектировании машин с гидротрансформаторами важным является выбор расчетного режима. При этом выборе исходят из целесообразности обеспечения высоких КПД на наиболее употребляемых режимах работы, и поэтому он определяется условиями эксплуатации проектируемой гидропередачи. Как следует из анализа характеристики η = f(i) на рис 17.5, б, область высоких КПД лежит между точками В и Е. Любая из точек на этом участке может быть использована в качестве расчетной. Но наиболее часто в качестве расчетного режима принимается режим гидромуфты (точка С на рис 17.5, 6). Может быть рекомендована следующая методика проектирования машин с использованием основ подобия гидродинамических передач. На первом этапе на базе анализа безразмерных характеристик подбирается наиболее подходящий вариант гидропередачи. Из условий эксплуатации проектируемой машины выбирается расчетный режим. Для выбранного расчетного режима с использованием формулы (17.7) или (17.8) определяется основной геометрический параметр гидропередачи – диаметр рабочих колес D. Затем (при известном D и безразмерной характеристике) подбирается существующая гидропередача или с использованием формул подобия лопастных гидромашин (см. подразд. 16.6) вычисляются параметры проектируемой гидропередачи. На заключительном этапе получают характеристики проектируемой машины при совместной работе двигателя и гидропередачи, анализируют полученные результаты и в случае необходимости вносят коррективы в ранее проведенные расчеты.
Лекция №5
|
||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 482; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.186.132 (0.008 с.) |