
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Раздел 2. Математическое описание сауСодержание книги
Поиск на нашем сайте
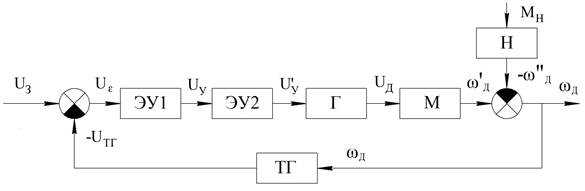
Для проведения анализа системы необходимо составить математическую модель САУ, которая будет состоять из передаточных функция отдельных звеньев. При математическом описании воспользуемся методами декомпозиции и композиции системы. Принципиальная схема САУ (рис. 1.1) может быть представлена в виде структурной блок-схемы (рис. 2.1), состоящей из отдельных элементов – звеньев системы. Каждое звено имеет свое математическое описание в виде дифференциального уравнения.
Рис. 2.1. Блок–схема системы стабилизации угловой скорости ДПТ
Дифференциальные уравнения звеньев системы могут быть составлены с применением известных в электромеханике законов. [**]: 1. ЭУ – электронный усилитель:
где kЭУ – коэффициент электронного усилителя. 2. Г – генератор:
где k 1 – коэффициент генератора, Т 1 – постоянная времени генератора. 3. М – двигатель постоянного тока:
где kД – коэффициент двигателя по управляющему воздействию, kf – коэффициент двигателя по возмущающему воздействию, ТМ – электромеханическая постоянная времени двигателя, ТЯ – электромагнитная постоянная времени двигателя. 4. ТГ – тахогенератор:
где kТГ – коэффициент тахогенератора. По уравнениям звеньев САУ получим их передаточные функции. Понятие передаточная функция является наиболее важной категорией в теории автоматического управления и регулирования. Передаточная функция является своего рода математической моделью АСР, т.к. полностью характеризует динамические свойства системы. Передаточной функцией называется отношение изображения выходного сигнала Y (p) к изображению входного воздействия X (p) при нулевых начальных условиях:
где р – оператор Лапласа. Передаточные функции звеньев системы получаем, используя определение передаточной функции и выражение (2.5): 1. ЭУ – электронный усилитель:
2. Г – генератор:
3. М – двигатель постоянного тока: Уравнение двигателя постоянного тока в операторной форме имеет вид:
Для двигателя постоянного тока входным воздействием является напряжение UД, возмущающим воздействием момент MН, а выходным угловая скорость ωД (рис. 2.1), таким образом можно применить принцип наложения (суперпозиции) и выделить следующие два случая: · сигнал MН (p) = 0; · сигнал UД (p) = 0. Тогда, для двигателя постоянного тока, имеющего входы по управлению и по возмущению, можно определить две передаточные функции по управлению:
по возмущению:
Тогда, общая передаточная функция двигателя постоянного тока:
4. ТГ – тахогенератор:
5. ЭС – элемент сравнения:
Раздел 3. Исследование САУ без корректирующего звена
|
||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 263; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.174.204 (0.006 с.) |

 , (2.1)
, (2.1) , (2.2)
, (2.2) , (2.3)
, (2.3) . (2.4)
. (2.4) , (2.5)
, (2.5) . (2.6)
. (2.6) ; (2.7)
; (2.7) . (2.8)
. (2.8) . (2.9)
. (2.9) ; (2.10)
; (2.10) . (2.11)
. (2.11) . (2.12)
. (2.12) . (2.13)
. (2.13) . (2.14)
. (2.14)


