Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Александр Владимирович ФроловСодержание книги
Поиск на нашем сайте Александр Владимирович Фролов Новые космические технологии
Александр Владимирович Фролов Новые космические технологии
Существует только один истинный закон – тот, который помогает стать свободным. Ричард Бах
«Чайка по имени Джонатан Ливингстон»
Предисловие
Движение – это изменение места положения объекта, процесс, происходящий как в пространстве, так и во времени. Мы существуем в движении, благодаря тому, что находимся на поверхности планеты, летящей в космосе вокруг Солнца, и вместе с ним в Галактике. С другой стороны, каждая частица вещества материальных объектов является эфиродинамическим процессом, более или менее устойчивым вихревым потоком эфирной среды. Таким образом, в реальном мире нет ничего неподвижного, все объекты находятся в движении. Мы замечаем движение, как изменение места положения, или другое изменение параметров процесса существования материи. Процесс движения не может останавливаться до тех пор, пока материя существует. С данной точки зрения, мы будем рассматривать способы создания движущей силы, действующей на тело, не забывая о том, что все материальные объекты состоят из микрочастиц, и находятся на поверхности нашей планеты. Говоря о перемещении тел, необходимо понимать, что при этом, так или иначе, приходит в движение комплекс частиц материи, существующий при определенных условиях. Практическое применение процесса движения состоит в том, чтобы перемещать объект, например, пассажиров и груз, из одной точки пространства в другую, по возможности, с минимальными затратами времени. Процесс движения, обычно, происходит с некоторой скоростью, но, как любое другое явление, имеет два «предельных случая»: в одном из них, тело мгновенно меняет местоположение в пространстве, а во втором, тело мгновенно меняет свое положение на оси времени. Первый случай относится к телепортации, а второй – к перемещениям во времени, без изменения положения в пространстве. Мы рассмотрим различные направления развития технологий перемещения в пространстве и времени, включая и эти два предельных случая. Обычные способы перемещения нам хорошо известны, основной из них – реактивный. Пешеход отталкивается от опоры ногами, автомобиль отталкивается от опоры при вращении колеса, и при этом, опора отталкивается назад, а транспорт получает реактивный импульс, и движется вперед. Лодка может приводиться в движение веслами, водометом или винтом, отталкивая назад воду, создавая реактивный эффект. При таком способе, строго выполняется закон сохранения импульса, который всем нам хорошо знаком: в результате реактивного взаимодействия, каждое из тел получает одинаковый импульс, который равен произведению массы и скорости, для каждого из двух взаимодействующих тел. Ракетные движители, винтовые или турбореактивные самолеты, и другая техника работает в точном соответствии с данным законом сохранения импульса. Ускорение летательного аппарата, например, ракеты, зависит от того, как много, и с какой скоростью, топливо будет выбрасываться через сопло ракеты во внешнюю среду. Отметим, что, для создания движущей силы, любой реактивный аппарат тратит энергию, чтобы придать ускоренное движение реактивной массе. При этом, выбрасываемое во внешнюю среду топливо увеличивает кинетическую энергию молекул среды, в конечном итоге, увеличивая температуру окружающей среды, нагревая ее. В таком случае, можно сказать, что увеличение тепловой энергии, кинетической энергии молекул окружающей среды, эквивалентно увеличению кинетической энергии летательного аппарата, или другого движущегося тела, использующего реактивный принцип. В этом проявляется закон сохранения импульса и энергии. Существуют другие, давно известные методы, похожие на реактивный принцип. Эти методы также работают в строгом соответствии с законом сохранения импульса, но в обратном направлении, а именно, за счет уменьшения тепловой энергии окружающей среды. Например, парусник приводится в движение не так, как лодка или катер: он тормозит движущийся поток среды (воздух) своим парусом, что изменяет (уменьшает) кинетическую энергию потока частиц окружающей среды, для того, чтобы увеличить скорость (кинетическую энергию) парусника. Поскольку термин «реактивный» означает «противодействующий», то принцип, противоположный реактивному, можно называть «активным», то есть «действующим». В реактивных движителях, сила, действующая на транспортное средство, создается, как реакция на увеличение энергии окружающей среды. Реактивные движители требуют источник энергии, для своей работы. В активных движителях, действующая сила создается за счет поглощения энергии окружающее среды. Благодаря этому свойству, активные движители могут служить источниками энергии, при своей работе. В главе о нанотехнологиях мы рассмотрим метод, позволяющий создать движущую силу без затрат топлива, за счет специального рельефа поверхности наноматериала, обеспечивающего отбор кинетической энергии молекул воздуха, или другой окружающей среды. Данный материал назван «силовой активный материал». Наличие ветра, в данном случае, не имеет значения, так как при масштабах около 100 нанометров, можно сказать, что «ветер есть всегда». Молекулы воздуха, при обычном атмосферном давлении и комнатной температуре, хаотически двигаются со скоростью 500 метров в секунду, но каждая из них движется прямолинейно, без столкновений, только на небольших участках своей траектории, длиной примерно 50 – 100 нанометров. Это движение можно использовать, создав, с помощью современных нанотехнологий, специальный упорядоченный рельеф поверхности. Итак, известные нам принципы создания движущей силы для ускорения транспортного средства работают за счет взаимодействия с окружающей средой, в соответствии с законами сохранения импульса и энергии, и другого не дано. Отдельно можно отметить, что выполнение данных законов не требует выброса реактивной массы за пределы корпуса транспортного средства, в том числе, и в ракетной и космической технике. Существуют известные технические решения, позволяющие получить реактивный макроимпульс, действующий на корпус транспортного средства, при выбросе сгораемого топлива из движителя в своеобразный «глушитель», находящийся внутри корпуса транспортного средства. В данном «глушителе», микроимпульсы частиц реактивной струи топлива теряют свою кинетическую энергию, и она переходит в окружающую среду в виде теплового излучения. При таком способе создания движущей силы, охлажденная рабочая реактивная масса вещества может быть возвращена в камеру сгорания, где она будет использоваться в новых циклах «нагрева – выброса – охлаждения – возврата». Рассматривая движение в воздухе, в воде или на поверхности опоры (дороги), мы можем описать почти все известные нам конструкции движителей транспортных средств. Все они являются реактивными или активными движителями. Не являются исключением и так называемые инерциоиды – устройства, использующие для создания движущей силы свойство тел, которое мы обычно называем «инерциальной массой». В главе про инерциоиды, мы рассмотрим физический механизм возникновения инерции при ускоренном движении тел и варианты его практического использования, с точки зрения эфирной теории. Отдельно от активных и реактивных методов, имеет смысл показать такие способы создания движущей (подъемной) силы, которые обусловлены градиентом давления среды. Перепад давления заставляет воздушный шар подниматься вверх. Теория воздухоплавания проста: окружающая среда имеет градиент плотности, а поскольку плотность среды внутри шара меньше, чем снаружи, то давление окружающей среды вытесняет шар вверх. Аналогично, сила Архимеда заставляет всплывать тела меньшей плотности, чем вода. Градиент давления в среде, в данных случаях, создает гравитационное поле планеты. По этой причине, эти силы действуют в вертикальном направлении. Разность давления среды возникает также при относительном движении крыла, имеющего профиль Жуковского – Чаплыгина, и окружающей среды, что создает подъемную силу, действующую на крыло со стороны среды. Градиент давления среды работает похожим образом в известном «эффекте Магнуса», который будет рассмотрен в отдельной главе. Силы такой природы могут быть направлены в любую сторону, что выгодно отличает данный метод от методов воздухоплавания. Физика, как и все естествознание, есть попытка изучить и понять каким образом устроен, то есть, создан, наш мир. В теологии много сказано о тройственной природе всего сущего. Используя метод аналогий между явлениями в трех физических средах, переходя от гидродинамики и аэродинамики к эфиродинамике, мы можем сохранять терминологию, и говорить об эфире разной температуры, разной плотности, которая обуславливает определенное статическое давление. Как и в газодинамике, в эфиродинамике удобно также использовать понятие о «динамическом давлении», которое также зависит от скорости потока. Полагая, что в эфиродинамике выполняется закон Бернулли о полном давлении, мы имеем возможность конструировать технические устройства – движители, работающие не в воздухе или воде, а в вакууме (эфирной среде). При таком подходе, от воздухоплавания мы можем перейти к эфироплавательным аппаратам. Конструкции эфирообменных движителей могут использовать электрические силы, магнитные явления, а также тот факт, что скорость распространения электромагнитных волн не является бесконечно большой. Это позволяет получить движущую силу за счет электрических и электромагнитных взаимодействий, поскольку они происходят не в пустом месте, а в эфирной среде, имеющей известные физические свойства. Аналоги эффекта Магнуса, для случая эфирной среды, относятся к области электродинамики. Мы рассмотрим несколько методов создания движущей силы, за счет изменения плотности эфира в некотором объеме пространства, и создания, таким образом, градиента давления среды на движитель. В заключительных главах данной книги, мы рассмотрим основы хронодинамики. Это новая область физики, изучающая явления, связанные с изменением хрональных (темпоральных) параметров объектов, то есть, таких параметров, как скорость существования объекта. Это скорость эфиродинамических процессов, в результате которых создаются атомы и все другие частицы вещества. Данная скорость воспринимается нами, как скорость хода времени. Она является относительным понятием: ускорение или замедление темпа существования отдельно взятого материального объекта имеет смысл рассматривать относительно естественного темпа существования объектов в околоземном пространстве – времени. В отдельной главе, посвященной четырехмерным резонансам, будет показано, каким образом физические параметры частиц микромира и элементов живой природы, в частности, молекулы ДНК, задаются параметрами (размерами) планеты. Это важно для развития понимания процессов существования частиц материи на других планетах, а также, для прикладных аспектов, например, создания условия стабилизации радиоактивных изотопов, что достигается путем изменения плотности эфирной окружающей среды. Увеличение или уменьшение скорости существования материи, то есть «скорости движения во времени», может рассматриваться по аналогии с движением тел в пространстве. При таком подходе, удобно использовать понятие о «хронодвижущей силе», которая играет такую же роль, как и электродвижущая сила в электродинамике, но для всех тел, а не только для электрически заряженных частиц. Соответствующее поле действия данной силы, имеющее некоторую напряженность (градиент хронального потенциала), мы можем назвать «хрональным полем», в котором движется «хронально заряженное тело». В общем, терминология знакомая, поскольку она вытекает из аналогий с электродинамикой. Увеличение напряженности поля создает движущую силу, действующее на заряженное тело, в заданном направлении, и так далее… Главный вывод из данной аналогии состоит в том, что мы можем планировать эксперименты по «хрональной индукции»: движение «хронального заряда» порождает поле, а изменение плотности тока «хронального заряда» в «генераторном хрональном контуре» должно индуцировать «хрональные токи» в «приемных контурах». Для конструктивного размышления о природе «хронального заряда» мы рассмотрим работы Козырева, Вейник и других известных авторов. В настоящее время, можно предположить несколько технически реализуемых экспериментальных методов создания хронодвижущей силы, хронополя и управляемого изменения хрональных параметров отдельно взятых объектов. Данные методы, по аналогии с реактивными методами, а также с воздухоплаванием, используют понятие об эфирной среде, имеющей реальные физические свойства, которые мы можем целенаправленно менять, для ускорения или замедления движения объекта во времени. Таким образом, переходя к вопросу о «машине времени», нам предстоит понять не только возможные принципы осуществления данной мечты человечества, но и ее технические характеристики, как перспективного транспортного средства. Впрочем, практически ценным, в современном мире, может оказаться такой прикладной аспект хрональных технологий, как возможность стабилизации радиоактивных частиц, с небольшими затратами энергии, и на большой территории. В отдельной главе книги, мы обсудим эксперименты по изменению скорости хода времени, которые автор проводил в 2003 году совместно с В.А. Чернобров. Рассматривая спектр упомянутых выше технологий, от давно известных, до фантастических, можно сделать вывод о том, что, на данном этапе развития нашей цивилизации, имеет смысл концентрировать усилия разработчиков в области проектирования транспортных средств нового типа, использующих такие активные движители, которые не требуют топлива для создания движущей силы. Все современные космические программы имеют жесткие ограничения, поскольку они используют общепринятую, но давно устаревшую концепцию реактивного топливного движителя. Новые технологии дают неоспоримые технологические преимущества в области космических, воздушных, наземных и морских перевозок, снижая себестоимость и неограниченно увеличивая дальность перевозок. Это огромные рынки сбыта, которые растут, учитывая планы аэрокосмических компаний по освоению ближнего космоса в 2020–2030 годы (например, строительство космических гостиниц). В данной книге, отдельно не обсуждается роль предлагаемых технологий для развития военнопромышленного комплекса, поскольку это очевидно. Подразумевается, что предлагаемые идеи имеют большое значение для совершенствования новейших видов вооружения, и разработки в данной области должны получить серьезную государственную поддержку, как стратегически важные проекты.
Глава 8 Инерциоиды
Мы уже начали рассматривать конструкции механических устройств, движущая сила в которых обусловлена применением свойства инерциальности частиц материи, то есть, их связи с эфиром. Данный тип движителей называется «инерциоиды», термин придумал инженер В.Н. Толчин, в 1936 году [13]. На фотографии рис. 31 показан один из инерциоидов Толчина. Принцип действия очень простой: два грузика вращаются синхронно, в разных направлениях, что компенсирует крутящий момент.
Рис. 31. Инерциоид Толчина Каждый из них, на половине траектории, разгоняется приводом, а на второй половине траектории привод выключается, а включается тормозная колодка (пружинный тормоз), вращение тормозится. Такой режим «мотор – тормоз» позволяет передавать реакцию корпусу устройства во время всего цикла, как при ускорении инерциальных масс, так и при их торможении. На схеме рис. 32 показаны две фазы работы подобного движителя: разгон эксцентриков приводом, а затем, их свободное движение, которое тормозится.
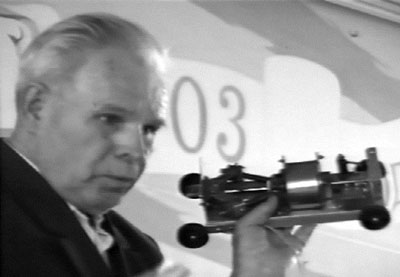
Рис. 32. Две фазы работы инерциоида При разгоне, от точки А до точки В, ускорение положительное, и при свободном движении, от точки В до точки А, ускорение отрицательное (торможение). Реакция корпуса на обе половины цикла направлена в одну сторону, хотя ее величина меняется, в связи с чем, устройство двигается рывками. Отметим, что в инерциоиде Толчина углы включения мотора или тормоза были равны 30 градусов: от 330 до 0 градусов работал мотор, а от 150 до 180 градусов происходило торможение. В общем случае, фазы ускорения и торможения могут составлять по половине цикла. В своих работах, А.Е. Акимов и Г.И. Шипов, раскрывают теорию работы инерциоидов с позиций «торсионной механики». Г.И. Шипов приложил много усилий для практического развития данной темы, еще в 1981 году изготовил два инерциоида по схеме Толчина в фирме Туполева, а затем успешно испытал их в МГУ, устанавливая инерциоид для испытаний на «платформу на воздушной подушке» [14]. Интересно, что при попытке Шипова подать заявку на изобретение в 1991 году, он получил отказ, обоснованный тем, что существует некое Постановление, запрещающее российскому патентному бюро принимать к рассмотрению заявки по данной теме. Формулировка «движение системы за счет внутренних сил» может быть изменена только в том случае, если Академия Наук официально признает существование эфира, как реальной среды, имеющей определенные физические свойства. Тем не менее, экспериментально, эффект Толчина и работоспособность его инерциоида были подтверждены неоднократно, еще в тем времена, когда Шипов работал с Ракетно‑Космической Корпорацией «Энергия», а также, в ходе совместных экспериментов с американскими учеными. В 2000 году, Шипов изучал тему инерциоидов в лаборатории, которую специально создали в Таиланде. Наконец, в 2002 году, НИИ Космических систем имени Хруничева начал серьезно заниматься темой инерциальных движителей, о чем говорит факт применения новой системы корректировки орбиты спутника «Юбилейный». История инерциоидов, судя по старым патентным документам, показывает наличие большого интереса изобретателей к данной теме. Очевидно, что есть спрос на подобную технику. Отчасти, это объясняется тем, что данные устройства довольно примитивны, не требуют электроники, и могли быть успешно реализованы много лет назад. В статье «Свободная энергия», 1996 год, я привел ссылки на десятки патентов по теме «инерциоиды» [15]. В 2003 году, в журнале «Новая энергетика» был дан обзор конструктивных решений инерциоидов, по схемам американских патентов [16]. Более ста схем инерциоидов рассмотрено на популярном интернет сайте www.rexresearch.com/inertial/inertial.htm Публике мало известно о масштабах работ правительственных лабораторий в данном направлении, полагаю, что их данные засекречены. В открытых средствах массовой информации можно найти публикации о проектах частных исследовательских фирм и изобретателей. Одним из ярких исторических примеров в данной области является «инерциоид Дина». Страховой агент из Вашингтона, Норман Л. Дин (Norman L. Dean) получил американский патент № 2,886,976 13 июля 1956 года. Устройство называется "System For Converting Rotary Motion Into Unidirectional Motion”, то есть, «система преобразования вращательного движения в однонаправленное». Второй патент взят позже, US Patent № 3,182,517 от 11 мая 1965 года «Variable Oscillator System», название означает «Система с изменяемым осциллятором». Критики работ Нормана Дина выражают свои сомнения по поводу его результатов, так как собрав аналог его изобретения строго по описанию, взятому из патента, они не получают работоспособного движителя. Предполагается, что автор описал в тексте патента принцип в сокращенном виде, не раскрывая некоторые важные детали конструкции. На рис. 31 показан автор данного изобретения Норман Дин, и его движитель. Это не один инерциоид, а несколько парных инерциоидов, каждый из них имеет по два встречных вращающихся эксцентрика, что позволяет устройству в целом хорошо компенсировать вибрации.
Рис. 33. Норман Дин и его движитель На рис. 34 показан рисунок из патента № 2,886,976, к которому добавлены названия основных деталей конструкции «движителя Дина».
Рис. 34. Схема движителя Нормана Дина Особенность конструкции «машины Дина» в том, что эксцентрики подвешены в корпусе упруго, на пружинах. Первоначально, Дин просто экспериментировал с парой эксцентриков, закрепленных на перемычке, которая, с помощью пружин, крепится к корпусу аппарата, как показано на рис. 35.
Рис. 35. Компенсация боковых колебаний двумя эксцентриками Перемычка и эксцентрики – это пара взаимодействующих тел. Их взаимодействие происходит в соответствии с законом сохранения импульса. Цикл движения эксцентриков делится на два полуцикла, создавая компенсацию силы тяжести на половине цикла. Рассмотрим цикл вращения, рис. 35: движение эксцентриков вниз вызывает реакцию опоры, начинается движение перемычки вверх. Далее, движение эксцентриков вверх вызывает реакцию опоры, которая проявляется как движение перемычки вниз. Поскольку вращение двух эксцентриков (пары) встречное, то Дину удалось компенсировать боковые колебания корпуса, а перемычка с вращающимися эксцентриками колебалась по вертикали. Как и следовало ожидать, суммарный импульс силы, действующий на корпус данного устройства за длительный интервал времени, был равен нулю. Далее, Дин создал «асимметрию цикла», которую мы обсуждали в схеме Толчина. В нужный момент, в конструкции включается «тормоз», рис. 36. В момент прохождения перемычки через среднее положение, она упирается в выдвижной поперечный тормоз, управляемый электромагнитом. В результате, получаются разные по величине силы взаимодействия колеблющейся вверх‑вниз перемычки с корпусом.
Рис. 36. Идея движителя Нормана Дина Выбрав правильный момент торможения, можно получить однонаправленную суммарную силу, в нужном направлении. Движитель с одной парой эксцентриков работает рывками, поэтому Дин соединил шесть движителей вместе, но расположение эксцентриситета на каждом из них сдвинул на угол 60 градусов. Таким образом, он получил полный цикл 360 градусов, и более‑менее равномерную однонаправленную силу тяги. Анализируя процесс энергообмена в движителе Дина, необходимо отметить важную роль упругого взаимодействия, хотя этот аспект мало обсуждается в публикациях по данной теме. В устройстве Дина, происходит упругая передача импульса от перемычки корпусу в одну сторону (вверх), и неупругое торможение перемычки о поперечный тормоз, при движении в другую сторону. Теоретически, данная задача хорошо проработана, и относится к физике взаимодействия тел. Известно, что столкновение тел может приводить к разным результатам: при упругом столкновении тела и корпуса устройства, в основном, корпусу передается импульс, а при неупругом столкновении (ударной деформации) большая часть импульса преобразуется в тепло. Схема эксперимента, который был мной показан аудитории конференции «Новые Идеи в Естествознании», в 1996 году, изображена на рис. 37.
Рис. 37. Эксперимент по упругому и неупругому взаимодействию Идея эксперимента довольно старая, она была опубликована, хотя и без объяснений причин данного явления, еще в 1935 году [17]. Итак, предположим, что на направляющем стержне могут скользить влево и вправо два грузика с отверстиями, например, два свинцовых цилиндра диаметром 15 мм и высотой 30 мм. Между ними расположена пружина, которая в начальный момент сжата, и удерживается в данном положении нитью. В правой части оси, был установлен резиновый амортизатор толщиной 5 мм. На рис. 38 показаны три последовательных кадра из видеозаписи данного эксперимента, который проводился на полированном столе в аудитории конференции «Новые идеи в естествознании», 1996 год. Суть эксперимента состоит в следующем: нить, которая удерживает пружину в сжатом состоянии, разрушают каким‑либо образом, например, пережигают. Тела, оттолкнувшись друг от друга в центральной точке корпуса, скользят в разные стороны, и каждое из них, по‑разному, взаимодействует с опорой в конце своего пути.
Рис. 38. Эксперимент по асимметрии взаимодействия С той стороны, где взаимодействие упругое (справа установлен амортизатор), опоре передается больший импульс, в результате чего, она сдвигается в данную сторону. С другой стороны (слева) тело ударяется об опору жестко, большая часть его кинетической энергии преобразуется в тепловые деформации. Положение устройства на столе, до и после взаимодействия тел с корпусом, отличается: после взаимодействия, устройство сдвигается в ту сторону, где установлен амортизатор. Данный опыт легко повторим, в том числе, на подвесе, на плавающей платформе и т. п. В каждом случае, суммарный импульс, передаваемый корпусу данного устройства в результате взаимодействия, не равен нулю, следовательно, в аналогичной конструкции движителя, мы можем получать однонаправленный импульс периодически, причем, без видимого взаимодействия с внешней средой, то есть, с какой либо опорой. Тем не менее, взаимодействие с окружающей средой здесь также есть, поскольку этот эксперимент – один из вариантов асимметричного «энтропийного движителя», описанного ранее, и показанного на рис. 1. С одной стороны, в данном экспериментальном устройстве энтропия минимальная, здесь создается макроимпульс, передаваемый корпусу движителя через амортизаторы, как и в движителе Дина. С другой стороны, энтропия процесса взаимодействия намного больше, так как частицы вещества получают при взаимодействии, в основном, неупорядоченные импульсы, а в результате деформаций, выделяется тепловая энергия, которая передается окружающей среде. Итак, движение может быть создано в результате асимметричного (в пространстве) энергообмена с окружающей средой. Позже, в главе о нанотехнологиях, мы вернемся к этому вопросу, показав еще один метод реализация данного принципа. Сейчас вернемся к механическим системам, использующим инерциальные свойства тела, движущегося по траектории переменного радиуса кривизны. Эффективность таких инерциоидов может быть очень высокая, например, в 1980‑е годы в Канаде и США испытывали инерционный привод по схеме Торнсона (Brandson R. Thomson), в котором эксцентрики двигаются по траектории кардиоиды. Данный привод был достаточно мощный для того, чтобы обеспечивать движение лодки с пассажирами. По энергозатратам, данный привод экономнее, чем бензиновый лодочный винтовой мотор примерно в 20 раз. Изобретение подробно описано в патенте US 4631971, от 30 декабря 1986 года. Рассмотрим схему инерциоида Торнсона, рис. 39. Серыми кружками на схеме показано положение эксцентрика при его движении, которое создается путем суммирования двух движений: орбитального и собственного вращения. Применение пары эксцентриков позволяет устранить боковой импульс, передаваемый корпусу.
Рис. 39. Схема инерциоида Торнсона Орбитальный валик «обкатывает» шестеренку, которая установлена на валу мотора. Моторов может быть два, но они должны работать синхронно. Обычно, для каждого эксцентрика создают свою шестеренку привода, которую «обкатывает» орбитальный валик, но оба привода синхронизированы, поскольку имеют один общий мотор. Экспериментальные данные, подтверждающие перспективность схемы Торнсона, были получены моим братом Фроловым Алексеем Владимировичем. При наличии интереса заказчиков к данной теме, мы готовы разработать комплект конструкторской документации для изготовления привода по схеме Торнсона. В настоящее время, разработаны компьютерные программы для моделирования кардиоиды и конструирования инерциоидов Торнсона. На рис. 40 показан один из вариантов конструкторского решения, в котором две подвижных шестеренки обкатывают неподвижную центральную шестеренку.
Рис. 40. Компьютерное моделирование инерциоида Итак, если траектория движения центра масс имеет форму кардиоиды, то центробежная сила, и сила реакция на корпус устройства, имеет разную величину в разных направлениях. Движущая сила обусловлена здесь, как и в других похожих схемах, градиентом центробежной силы. В настоящее время, авторов изобретений по теме «инерциоиды» очень много. Хотелось бы рассказать про тех, кого я знал лично. Примером многолетней бескорыстной исследовательской работы в данном направлении являются проекты Константина Дмитриевича Шукалова, Иваново. В 1996 году, он приезжал в Санкт‑Петербург на конференцию, и демонстрировал свои модели в работе, рис. 41.
Рис. 41. Константин Дмитриевич Шукалов демонстрирует один из своих инерциоидов, 1996 год Одна из моделей Шукалова показана на рис. 42. В данной конструкции привода, питание на электромагнит подается по проводу. Два эксцентрика движутся по траектории постоянного радиуса, но их взаимодействие имеет особенность: в одном крайнем положении, они ударяются друг о друга, импульс «гасится». В другом крайнем положении, они ударяются о пружины, передавая корпусу два сонаправленных импульса.
Рис. 42. Один из инерциоидов Шукалова По поводу закона сохранения импульса, для рассматриваемой конструкции, необходимо отметить, что при соударении грузов, их импульс преобразуется в тепловую энергию деформации вещества, из которого сделаны движущиеся грузы. При сжатии пружин, в другой фазе рабочего цикла, энергия частично преобразуется в тепло, но большая часть кинетической энергии движущихся грузов передается корпусу движителя. Данная схема Шукалова представляется весьма перспективной для практического внедрения. Практическое применение таких приводов возможно не только в авиации, на судах или в космосе, но и в роли привода любой колесной техники, причем технологически устраняется система передачи крутящего момента на колеса (трансмиссия) и создается качественно новый уровень техники. Все, что требуется для внедрения данной перспективной технологии на транспорте, это интерес заказчиков и инвесторов.
Глава 9 Прецессия гироскопа
Отдельно можно выделить тип инерциальных движителей, которые используют эффекты, возникающие при вынужденной прецессии гироскопа. Напомню, что метод Полякова есть частный случай практического использования данного явления. Суть эффекта, в классическом понимании: гироскоп стремится сохранять момент вращения, и любой поворот оси его вращения (вынужденная прецессия) создает пару сил, то есть, дополнительный крутящий момент, компенсирующий данный поворот. На рис. 43 показана векторная суперпозиция сил, возникающая при вынужденной прецессии оси гироскопа.
Рис. 43. Силы, возникающие при вынужденной прецессии оси гироскопа Возникающая сила F настолько мощная, что способна поворачивать человека, сидящего на вращающемся табурете – «скамейке Жуковского», если у него в руках небольшой, но быстро вращающийся гироскоп. Важная особенность: сила F не линейная, она создает поворот оси вращения гироскопа в плоскости XOY, если на ось действует внешняя сила, поворачивающая ее в плоскости ZOY. Другая особенность – эффект увеличивается, если гироскоп вращается быстрее, и поворот оси в плоскости ZOY происходит быстрее. Согласитесь, что данная ситуация чем‑то напоминает возникновение силы Лоренца, или силы Магнуса. Попробуем найти аналогии и причины возникновения данной силы, в рамках эфиродинамики. На рис. 44 показан гироскоп, который вращается вокруг оси Y, и поворачивается в плоскости YOZ.
Рис. 44. Векторное сложение скоростей в верхней и нижней части гироскопа Возникает пара гироскопических сил: F1 направлена вверх, и F2 – вниз, в плоскости XOY, с точки зрения наблюдателя, который видит вращение гироскопа вокруг оси Y по часовой стрелке (правое вращение). Какие могут быть причины появления данной пары сил? Отметим следующий факт: разные части прецессирующего гироскопа движутся с различной скоростью относительно внешней среды. Скорость движения частиц верхней части гироскопа, относительно внешней среды, за счет сложения сонаправленных векторов скоростей V1и V2, больше, чем скорость движения частиц нижней части гироскопа, относительно среды. В результате, как и в газодинамике, в соответствии с законом Бернулли, давление внешней среды на частицы материи в разных частях гироскопа не одинаковое, то есть, возникает градиент давления среды на прецессирующий гироскоп. Эффект проявляется как в воздухе, так и в вакууме, поэтому у нас есть повод говорить о эфиродинамическом давлении внешней среды на частицы материи гироскопа. Таким образом, пару гироскопических сил можно обосновать градиентом давления эфира на вращающиеся частицы материи гироскопа. Следовательно, это внешняя сила, и мы можем использовать ее в конструкциях движителей активного типа. При конструировании следует учесть, что это сила не сдвигает гироскоп линейно, а поворачивает его ось в плоскости XOY, увеличивая крутящий момент гироскопа. Дополнительно, рассмотрим вопрос с другой стороны. На рис. 45 показана траектории движения точки на периферии вращающегося гироскопа, при его прецессии (повороте оси вращения).
Рис. 45. Траектория точки на прецессирующем гироскопе Расстояние от данной точки до центра вращения гироскопа постоянное, но с учетом того, что сам центр вращения гироскопа (при вынужденной прецессии) движется, то такая траектория движения точки в пространстве уже не является окружностью. Очевидно, что кривизна разных участков данной траектории не является постоянной, поэтому скорость движения и ускорение криволинейного движения также не является постоянным. Этот принцип мы рассматривали ранее, например, в экспериментах А.И. Вейник, рис. 15. Центробежная сила, действующая на тело при его ускоренном криволинейном движении, зависит от величины ускорения, и, в данном случае, она также не является одинаковой на разных участках траектории. Таким образом, возникает градиент силы, преимущественно в одном направлении. Пример практического применения данного метода показан на рис. 46, патент США 3,653,269 от 15 мая 1970 года, автор Ричард Фостер (Richard Foster).
Рис. 46. Движитель с гироскопами, автор Ричард Фостер В описании патента, показана конструкция в виде тележки, на которой вращается диск, и на диске установлены два гироскопа, в окнах (отверстиях). В конструкции есть электромоторы трех групп, различных по назначению: два мотора 32 вращают сами гироскопы, причем, питание на них подаются через щетки и два контактных диска. Моторы 32 сами тоже вращаются приводами 38, создающими прецессию гироскопов. Гироскопы закреплены на оси вращения, которая расположена диаметрально в окне диска. Мотор 23 поворачивает весь диск, что и создает реакцию на весь корпус. При одной половине цикла силу тяги создает один гироскоп, потом он выключается, а силу тяги создает второй гироскоп. Каждый из гироскопов «работает» половину цикла. Существует много аналогичных схем, в том числе, запатентованных. Практические исследования можно проводить даже в небольшой домашней лаборатории, однако, следует знать важный аспект применения подобных технологий: возникающие при работе инерциального движителя реакции в эфире могут отрицательно влиять на здор
|
||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 607; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.41 (0.018 с.) |