
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тема 2.7 Сенсомоторные реакции оператораСодержание книги
Поиск на нашем сайте
Связь восприятия и движения Любому управляющему действию оператора предшествует восприятие информации. Связь восприятия и движения осуществляется в виде сенсомоторных реакций или сенсомоторной координации. Сенсомоторной реакцией называется одиночное (дискретное) движение оператора на появление (прекращение) действия раздражителя. Различают следующие виды сенсомоторных реакций: – простая; – сложная; – реакция слежения. Простая сенсомоторная реакция заключается в ответе заранее известным простым одиночным движением на внезапно появляющийся, но заранее известный сигнал. Основной показатель такой реакции – время, которое состоит из времени восприятия сигнала (латентного, скрытого периода) и времени моторного действия: /Pict 12-01/
где tв– время восприятия сигнала; tм– время моторного действия. В реальных процессах работы оператора простые сенсомоторные реакции встречаются сравнительно редко. Сложная реакция (реакция выбора) заключается в том, что оператор должен вответ на появление каждого из возможных сигналов осуществить то или иное действие, которое полностью определено для каждого из этих сигналов. В этом случае оператор должен не только обнаружить появление сигнала, но еще и выделить его среди какого-то количества могущих появиться сигналов (осуществить выбор), принять решение на осуществление того или иного управляющего действия и только после этого осуществить его.
Время сложной реакции будет определяться как /Pict 12-02/
где tв– время восприятия сигнала; tр– время принятия решения; tп– время поиска и обнаружения нужного органа управления; tм– время моторного действия. Сложные реакции в той или иной степени осуществляются под контролем зрительной системы. Многие элементы программы двигательного действия формируются еще до начала движения, по отношению к которому зрительная система выступает в роли задающего устройства. Таким образом, сенсорная и моторная составляющие времени реакции имеют на оси времени общий участок (рис. 12.1). /Pict 12-03/
Рис. 12.1 Соотношение между различными компонентами сенсомоторной реакции (ЛП – латентный период, ВД – время движения) Сенсорная составляющая сложной реакции зависит от числа альтернатив, вероятности появления, модальности и интенсивности сигнала. Моторная составляющая зависит от амплитуды движения и размера органа управления. Для деятельности оператора характерны два режима осуществления сложной реакции. В первом случае перед началом дискретного движения глаза неподвижны (режим зрительной фиксации) и рука оператора находится в покое. Например, оператор должен вести непрерывное наблюдение за некоторым узким участком индикатора и в то же время реагировать на появление сигналов вне участка. При этом соотношение площадей индикатора и контролируемого участка может быть достаточно большим. Этот режим называется режимом фиксации. Во втором случае глаза оператора свободно рассматривают некоторое информационное поле, а рука или неподвижна, или занята каким-либо побочным движением. Такой режим возникает, когда оператор должен вести наблюдение за несколькими индикаторами одновременно и реагировать только в том случае, если на одном из них произошло критическое изменение параметра. При этом соотношение между площадью индикатора и контролируемого участка может быть малым. Этот режим называется свободным режимом. Латентный период значительно меньше при наблюдении в свободном режиме, чем в режиме фиксации при прочих равных условиях. Его величина зависит от эксцентриситета (направления расположения) сигнала: наблюдается медленное увеличение с ростом угла проекции сигнала на сетчатку глаза (рис. 12.2). /Pict 12-04/
Свободный режим
Рис. 12.3 Зависимость времени движения от амплитуды: 1 – режим фиксации; 2 – свободный режим
Общее время реакции зависит от сложности выбора нужного сигнала на информационном поле. В качестве меры сложности может быть принято количество информации, поступающей к оператору. Увеличение общего времени реакции происходит в основном за счет сенсорной составляющей. Моторная составляющая практически постоянна (рис. 12.4). /Pict 12-06/ Результаты, свидетельствующие об уменьшении обеих составляющих времени реакции в свободном режиме по сравнению с режимом фиксации; показывают функциональное единство сенсорных и моторных процессов. В ответ на изменение режима наблюдения появляются качественные и количественные изменения в моторной деятельности, что свидетельствует об участии параллельно действующих каналов, имеющих общие временные характеристики.
Рис. 12.4 Зависимость компонентов времени реакции от количества информации: 1 –время движения; 2 – латентный период; 3 – общее время реакции
Реакция слежения заключается в том, что посредством воздействия на органы управления оператор должен удерживать движущийся объект на заданной траектории или совмещать его с другим движущимся объектом. В отличие от предыдущих реакций, которые носят дискретный характер, реакции слежения представляют собой в большей степени непрерывный процесс. Различают два основных вида реакций слежения: – сопровождающее слежение или слежение с преследованием, когда оператор воспринимает весь ход изменений входного и выходного сигналов и сводит к нулю разностную ошибку; – компенсирующее слежение, когда оператор воспринимает только разность между входным и выходным сигналами и стремится свести ее к нулю. В качестве разновидности сопровождающего слежения иногда выделяют слежение с предсказанием. Под ним понимают процесс, при котором оператор воспринимает не только текущие значения входного сигнала, но и закон его изменения на некоторый отрезок времени вперед (управление автомобилем). Установлено, что предвидение существенно улучшает условия деятельности оператора и повышает точность слежения (индикаторы с предсказанием). Основными характеристиками процесса слежения являются: – время инерции; – время нахождения метки на цели; – ошибки слежения; – плавность слежения. Переменными параметрами являются: – скорость движения цели; – первоначальное рассогласование; – время слежения.
Ошибки реакций оператора На результаты работы оператора большое влияние оказывают ошибки сенсомоторных действий. Установлено, что число ошибок существенно зависит от вида и направления движения. Из трех основных направлений поступательных движений (вверх-вниз, вперед-назад, вправо-влево) лучшими по числу минимума ошибок являются первые (вверх, вперед, вправо). Поперечные движения (вправо-влево) дают большую частоту ошибок (вероятность 0,03), поэтому при проектировании панелей управления их следует избегать. Еще большую частоту ошибок дают поворотные движения рук вокруг продольных осей (вероятность 0,091) (табл. 12.1). /Pict 12-07/ Лучшим распределением функций являются следующие: правая рука осуществляет точные непрерывные движения, а левая выполняет дискретные действия. Независимо от режима работы по всем направлениям наблюдается рост числа ошибок с ростом амплитуды движения.
Частота ошибок зависит также от пальца, которым осуществляется управляющее воздействие. С точки зрения увеличения частоты ошибок различные пальцы располагаются в следующем порядке: большой, средний, указательный, мизинец, безымянный. При отработке сигналов одновременно различными сочетаниями пальцев время реакции и частота ошибок увеличиваются с увеличением числа пальцев в сочетании. Эти показатели зависят также от того, какие именно пальцы участвуют в сочетании. Это важно учитывать при разработке полуфункциональных и функциональных клавиатур.
|
||||
|
|
Последнее изменение этой страницы: 2016-09-20; просмотров: 1013; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.45.223 (0.007 с.) |

 ,
, ,
,
 Рис. 12.2 Зависимость времени латентного периода от эксцентриситета сигнала: 1 – режим фиксации;
Рис. 12.2 Зависимость времени латентного периода от эксцентриситета сигнала: 1 – режим фиксации;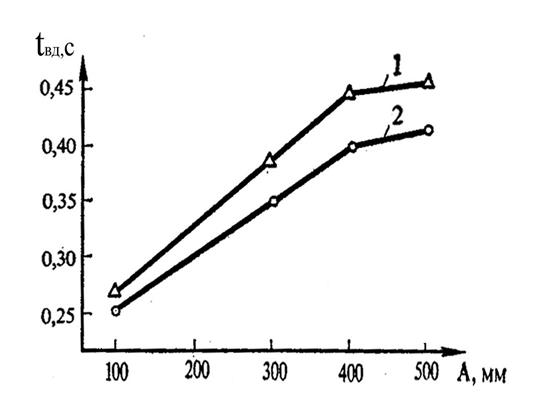 Время движения также существенно меньше в свободном режиме, чем в режиме фиксации при прочих равных условиях и зависит от амплитуды (рис. 12.3). /Pict 12-05/
Время движения также существенно меньше в свободном режиме, чем в режиме фиксации при прочих равных условиях и зависит от амплитуды (рис. 12.3). /Pict 12-05/
 Таблица 12.1 Зависимость ошибочных реакций от вида движения
Таблица 12.1 Зависимость ошибочных реакций от вида движения


