
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование способов регулирования скорости асинхронных двигателей с короткозамкнутым ротором»Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте Теоретическая часть Двигатели переменного тока имеют несколько разновидностей. Наиболее важными из них являются двигатели трехфазного тока: асинхронные с короткозамкнутым (АДК) или фазным (АДФ) ротором и синхронные (СД). В сравнении с двигателями постоянного тока асинхронные двигатели проще, дешевле, надежнее в эксплуатации и не требуют преобразования трехфазного переменного тока, получаемого непосредственно от заводских сетей, в постоянный ток. Конструктивная схема трехфазного асинхронного АДК приведена на рис.2.1,а. Шихтованный статор машины 1 имеет равномерно расположенные по внутренней расточке пазы, в которые уложены три фазы обмотки. Оси обмоток фаз пространственно сдвинуты на 120° относительно друг друга. При включении обмотки статора в трехфазную сеть переменного тока в фазах протекают переменные токи IА, IВ, Ic, которые создают переменные н. с. FA, FВ и Fc, изменяющиеся во времени по синусоидальным законам со сдвигом во времени на 1/3 периода переменного тока.
Рис.31. Конструктивная схема (а); механические характеристики АДК (б)
Вследствие сдвига по времени максимумы магнитных потоков фаз наступают поочередно в последовательности — фаза А, фаза В, фаза С, что приводит к вращению результирующего магнитного поля машины со скоростью
где: f1 — частота сети переменного тока, Гц; 2р — число пар полюсов; n1 – скорость вращения результирующего магнитного поля в воздушном зазоре между статором и ротором, об/мин. Так как число пар полюсов может выражаться только числами натурального ряда 1, 2, 3, 4 и т. д., то при промышленной частоте синхронная скорость двигателя может иметь лишь вполне определенные значения: 3 000, 1 500, 1 000, 750 об/мин и т.д. соответственно. По конструкции асинхронные машины делятся на два основных типа: с короткозамкнутым ротором (АДК) и фазным ротором (АДФ). Наибольшее распространение получили двигатели с короткозамкнутым ротором, которые в серии 4А выполняются на все мощности, включая 400 кВт. Обмотки короткозамкнутых роторов выполняются литыми из алюминия или его сплавов или из меди. При заливке одновременно отливаются стержни, лежащие в пазах, и короткозамыкающие медные кольца с размещенными на их торцах вентиляционными лопатками и штырями для крепления балансировочных грузиков (см. рис. 3.1).
Рис.3. 2. Асинхронный двигатель 4А250
Роторы АДК крупных и специальных асинхронных машин с улучшенными пусковыми характеристиками выполняются сварными. Стержни ротора из меди или латуни привариваются к короткозамыкающим кольцам, имеющим отверстия, куда перед сваркой вставляются стержни обмотки. АДФ имеют на роторе обмотку из круглых или прямоугольных проводов, которая выполняется так же, как и обмотка статора, начала которой выведены на контактные кольца. Узел контактных колец вынесен из станины, а контактные кольца закрыты кожухом. Узел контактных колец — консольного типа. Контактные кольца, опрессованные пластмассой, насаживаются на вал двигателя Кольца выполняются чугунными или медными. Выводные концы обмотки ротора подходят к трем кольцам через внутреннее отверстие в вале ротора. Обмотка ротора соединяется в звезду. Токосъемный аппарат состоит из щеток и щеткодержателей. Щеткодержатели укреплены на изолированной части пальца, металлический конец которого ввинчен в прилив подшипникового щита. При изготовлении серий электрических машин предусматривается максимальная унификация, поэтому большинство деталей одинаковые для машин как с короткозамкнутым, так и с фазным ротором. Статор АДК и АДФ состоит из магнитопровода с обмоткой и станины. Магнитопровод статора набирается из листов электротехнической стали, изолированных друг от друга специальным изоляционным клеем, и имеющих на внутренней поверхности пазы. Сердечник статора состоит из отдельных пакетов, которые после сборки скрепляют скобами и укрепляют в станине. При сборке пакетов магнитопровода статора может быть выполнен скос пазов. Форма пазов и число пазов на статоре зависят от мощности и частоты вращения. Принципиальные схемы подключения асинхронных двигателей с короткозамкнутым и фазным ротором приведены на рис. 3.3.
Рис. 3.3. Схема принципиальная подключения АД с короткозамкнутым ротором (а) и фазным ротором (б)
Ротор двигателя 2 на рис.3.3,а имеет короткозамкнутую обмотку в виде беличьей клетки 3 и находится во вращающемся со скоростью n1 магнитном поле, создаваемом обмоткой статора. Вращающееся магнитное поле, пересекая проводники ротора, наводит в них э. д. с., под действием которой в замкнутой накоротко обмотке ротора протекают токи, вокруг которых создается свое магнитное поле. В результате взаимодействия этих магнитных потоков, возникает потокосцепление, создающее момент М, увлекающий ротор в направлении вращения поля статора. Электродвижущая сила роторной обмотки зависит от относительной скорости пересечения полем проводников ротора, которую принято называть скольжением асинхронной машины. Скольжение s, %, определяется по формуле (3.2)
где n2 — скорость вращения ротора. Электромеханические свойства АДК можно установить, рассматривая его механическую характеристику (кривая 1 на рис.7.1,6). При вращении ротора с синхронной скоростью n = n1, скольжение s = 0, соответственно равны нулю э. д. с. ротора и развиваемый машиной момент М. При увеличении нагрузки на валу ротор начинает отставать от поля, скольжение возрастает, что вызывает рост момента двигателя М до значения, определяемого нагрузкой на валу. При этом скорость несколько уменьшается, оставаясь близкой скорости n1. В пределах рабочих нагрузок характеристика асинхронного двигателя подобна характеристике двигателя с независимым возбуждением. Однако при дальнейшем росте нагрузки механическая характеристика асинхронного двигателя все больше отклоняется от прямой, скорость уменьшается с возрастанием М все быстрее. При увеличении нагрузки на валу до значений, превышающих критический момент машины Ммакс. дальнейшее снижение скорости вызывает не возрастание момента двигателя, а его уменьшение и двигатель быстро останавливается. Важным параметром АДК является пусковой момент Мп, который он развивает при n=0, т. е. в начале пуска. У АДК нормального исполнения пусковой момент намного меньше, чем критический момент Ммакс. Это обстоятельство осложняет пуск двигателей под нагрузкой, поэтому конструкторы принимают меры для увеличения пускового момента. С этой целью, например, можно увеличить сопротивление короткозамкнутой роторной обмотки, применив для ее изготовления сплав с большим удельным сопротивлением. Характеристика двигателя при увеличении сопротивления роторной клетки примет вид кривой 2 на рис.3.1,6. Рассматривая ее, можно установить, что при изменении сопротивления ротора критический момент не изменяется, пусковой момент увеличивается, но одновременно уменьшается скорость вращения двигателя в рабочей зоне характеристики и уменьшается к. п. д. двигателя. Двигатели, изготовленные с повышенным сопротивлением роторной клетки, называются двигателями с повышенным скольжением. Другим способом увеличения пускового момента является изготовление ротора с глубокими пазами или с двойной беличьей клеткой. В этом случае сопротивление роторной обмотки переменно — при малых скоростях оно больше, чем в рабочей зоне. Характеристика двигателя с двойной беличьей клеткой представлена на рис.3.1,6 (кривая 3). Кроме того, в специальном многоскоростном исполнении этот двигатель обеспечивает ступенчатое регулирование скорости (практически не больше четырех ступеней). АДФ имеют на роторе трехфазную обмотку, аналогичную статорной. Зажимы обмотки ротора выведены на контактные кольца, поэтому в цепь ротора такого двигателя можно включать добавочные пусковые и регулировочные сопротивления, или тиристорный преобразователь. Схема включения двигателя с фазным ротором показана на рис.3.4,а. На рис.3.4,б показаны механические n=f(M) и электромеханические n=f(I1) характеристики, где I1 — ток фазы статорной обмотки. Механическая характеристика 1 соответствует работе двигателя с замкнутыми накоротко кольцами. Сравнивая ее с кривой 1 на рис.3.1,б, можно убедиться, что они аналогичны по форме, но пусковой момент двигателя с фазным ротором при n = 0 обычно меньше, чем у короткозамкнутого. Кривая 1' представляет соответствующую механической характеристике 1 зависимость n=f(I1). При включении добавочного сопротивления RД2 в цепь ротора пусковой момент двигателя увеличивается, а пусковой ток IП — уменьшается (кривые 2 и 2' на рис.3.4,б).
Рис.3.4. Схема включения АДФ (а); его характеристики (б).
Поэтому, вводя пусковой реостат в цепь ротора, можно получить достаточный пусковой момент при небольшом токе статора, а затем постепенно по мере разгона двигателя вывести его, замкнуть кольца накоротко и работать со скоростью, мало отличающейся от синхронной. Это важное преимущество АДФ перед АДК. При эксплуатации асинхронных двигателей необходимо учитывать, что при снижении напряжения сети пусковой и критический моменты снижаются пропорционально квадрату напряжения сети. АДФ успешно применяются для механизмов, работающих с частыми пусками и остановками под нагрузкой и требующих регулирования скорости в первой зоне. Благодаря простоте и надежности асинхронные двигатели получили на практике наиболее широкое применение, хотя их возможности до середины 20 века в отношении регулирования скорости были весьма ограничены. Режимы работы асинхронных машин: В двигательном режиме электрическая мощность Р1, поступающая в двигатель из сети, преобразуется в механическую мощность Р2. Ротор асинхронного двигателя приходит во вращение с частотой При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи. В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор асинхронного двигателя приходит во вращение с частотой Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность частот вращения ротора и вращающегося поля статора (см.формулу 7.2).Вполне очевидно, что с увеличением нагрузочного момента на валу АД частота вращения ротора уменьшается. Следовательно, скольжение асинхронного двигателя зависит от механической нагрузки на валу двигателя и может изменяться в диапазоне 0 < s < 1 (3.3.)
При включении асинхронного двигателя в сеть в начальный момент времени ротор под влиянием сил инерции неподвижен, т.е. Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением sном. Для асинхронных двигателей общего назначения s = 1-8%, при этомдля двигателей большой мощности sном =1%, для двигателей малой мощности sном =8%. Преобразовав выражение (3.2), получим формулу для определения асинхронной частоты вращения:
В генераторном режиме обмотку статора включают в сеть, а ротор асинхронной машины посредством приводного двигателя, являющегося источником механической энергии, вращают в направлении вращения магнитного поля статора с частотой, большей частоты вращения поля статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент на роторе М2 также изменит свое направление, т.е. будет направлен встречно вращающемуся магнитному полю статора истанет тормозящим по отношению к вращающемуся моменту приводного двигателя Мi. В этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную мощность Р2, переменного тока. Особенность работы асинхронного генератора состоит в том, что вращающееся магнитное поле в нем создается реактивной мощностью Q трехфазной сети, в которую включен генератор и куда он отдает вырабатываемую активную мощность Р2. Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении к которому происходит возбуждение генератора, т.е. в нем возбуждается вращающееся магнитное поле. Скольжение асинхронной машины в генераторном режиме может изменяться в диапазоне
т.е. оно может принимать любые отрицательные значения. В режиме торможения противовключением ротор асинхронной машины посредством приводного двигателя вращают против направления вращения магнитного поля статора. В этих условиях электромагнитный момент машины, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие. Активная мощность, поступающая из сети в машину, частично затрачивается на компенсацию механической мощности вращающегося ротора, т.е. на его торможение. Частота вращения ротора является отрицательной. В режиме электромагнитного торможения частота вращения ротора является отрицательной, а поэтому скольжение приобретает положительные значения больше единицы и может изменяться в диапазоне 1 < s < + т.е. оно может принимать любые положительные значения больше единицы. При динамическом торможении статор асинхронного двигателя отключают от сети и подключают к источнику постоянного тока. Применение динамического торможения вместо торможения противовключением позволяет значительно улучшить регулировочные показатели асинхронных двигателей, однако, при таком режиме торможения увеличиваются потери активной энергии, и снижается КПД. Режим холостого хода происходит при работе АД на холостом ходу без нагрузки на его валу. Режим имеет низкий КПД и отрицательно сказывается на Режим короткого замыкания происходит при замкнутой накоротко вторичной обмотке и заторможенном роторе. Режим аварийный, так как приводит к пробою изоляции как статора, так и ротора, к большим тепловым потерям и воспламенению машины. Рабочие характеристики АД есть зависимость потребляемой мощности Р1,первичного тока I1, cos Рабочие характеристики позволяют находить все основные величины, определяющие режим работы машины в двигательном, генераторном и трансформаторном режимах при различной нагрузке. Механической характеристикой АД является зависимость скорости вращения ротора ω2 или скольжения s в функции механического вращающего момента электромагнитного происхождения Мэл при неизменном напряжении сети или зависимость электромагнитного вращающего момента Мэл от скольжения s. Выражение для электромагнитного вращающего момента АД
где: хk - реактивное сопротивление двигателя, Ом, хk = x1 + x2; г'2 и х'2 - приведенные к статору, соответственно, активное и реактивное сопротивления фазы ротора, Ом; s – скольжение, %; ω1 - скорость вращения магнитного поля статора, с-1; г1 - активное сопротивление фазы статора, Ом; U1Ф - фазное напряжение сети, В. Выражение (3.7) представляет собой аналитическую качественную зависимость естественной механической характеристики АД (рис.3.5), где прямая ОА является рабочей частью этой характеристики (т. А соответствует номинальному режиму), а кривая ВА – ее пусковой частью.
Рис.3.5.Естественная механическая характеристика АД
Для построения естественной механической характеристики как АДК, так и АДФ, на практике используют упрощенную формулу Клосса:
где Мi – текущий момент на валу двигателя, Нм; Мmax – максимальный или критический момент, развиваемый данным двигателем, Нм; si – скольжение, соответствующее текущему моменту, %; sk – критическое скольжение, %. Регулирование изменением амплитуды питающего напряжения: Из формулы 2.7 видно, что электромагнитный момент Мэл прямо пропорционален квадрату амплитуды питающего напряжения, т.е. при изменении Uф меняется и Мэл.. Регулирование в этом случае производится только в первой зоне, т.к. возникает опасность перегрева статора, особенно при повышениях амплитуды напряжения в сети на величину, превышающую 5-10%, жесткость рабочей части механической характеристики падает, уменьшается Мпуск и Мmax, Мном – сохраняются. Диапазон регулирования даже в первой зоне ограничен, т.к. возникает опасность перегрева ротора при понижении амплитуды напряжения в сети на величину, превышающую 2,5-5% (см. рис. 3.6).
Рис.3.6 Регулирование изменением частоты питающего напряжения: Из той же формулы 1.7, видно, что Мэл обратно пропорциональна величине частоты питающего напряжения f1.
где: f1 , Гц – частота питающего напряжения; 2р – число пар полюсов. Искусственные характеристики в этом случае располагаются в обеих зонах регулирования, жесткость рабочей части механической характеристики сохраняется, Мпуск и Мmax изменяются, Мном сохраняется неизменным (см. рис. 3.7).
Рис.3.7.
Регулирование изменением частоты и амплитуды питающего напряжения: Из вышеприведенных графиков (рис.3.6 и 3.7), видно, что искусственные характеристики и в случае изменения только амплитуды, и в случае изменения только частоты питающего напряжения, имеют ряд недостатков. Для исключения этих недостатков должен выполняться закон частотного регулирования, который в первом приближении выглядит так:
где U1i – i-тое значение измененной амплитуды питающего напряжения; f1i – i-тое значение измененной частоты питающего напряжения. В этом случае (см. рис. 1.8) сохраняются жесткость рабочей части искусственных характеристик, Мmax и Мном; изменяется только Мпуск..
Рис.3.8
Выполнение этого закона позволяет сохранять жесткость рабочей части механической характеристики в обеих зонах, сохраняя при этом высокий к.п.д. и cos
|
||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 712; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.013 с.) |


 (3.1)
(3.1)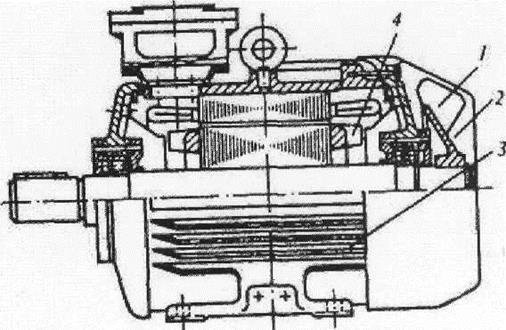

 (3.2)
(3.2)
 в сторону вращения поля статора.
в сторону вращения поля статора. в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и т.п.), то вращающий момент двигателя М2, преодолев противодействующий (нагрузочный) момент Мнагр. исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность Р2 и передается исполнительному механизму ИМ.
в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и т.п.), то вращающий момент двигателя М2, преодолев противодействующий (нагрузочный) момент Мнагр. исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность Р2 и передается исполнительному механизму ИМ. .
.
 (3.4)
(3.4) < s < 0, (3.5)
< s < 0, (3.5) всего предприятия.
всего предприятия. , момента на валу М2и КПД от полезной мощности Р2 при работе с номинальными U1,
, момента на валу М2и КПД от полезной мощности Р2 при работе с номинальными U1,  1.
1. , Нм (3.7)
, Нм (3.7)
 , (3.8)
, (3.8)
 , с-1 (3.9),
, с-1 (3.9),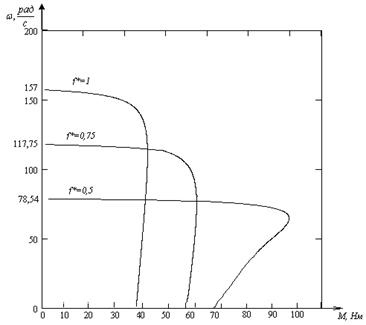

 (3.10),
(3.10),
 .
.


