Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Статический расчет механизмаСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Механизм состоит из груза 1, весом Р1 и блоков 2 и 3 весом Р2 и Р3 закрепленных на опорах А и В. Радиусы неоднородных блоков r2, R2 и r3, R3 соответственно. Груз и блоки соединены посредством невесомых нерастяжимых тросов, намотанных на блоки. К опоре А прикреплен невесомый рычаг АК длиной l, к концу которого приложена сила F под углом b к рычагу. К блоку 3 приложена пара сил с моментом М. Вычислить величину и истинное направление момента М, при которых механизм сохраняет состояние равновесия. Найти также реакции всех внешних и внутренних связей в положении равновесия механизма.
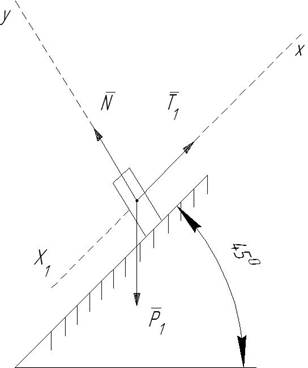
Статическое равновесие груза 1
Рассмотрим статическое равновесие груза 1: Силы P1, N и реакции троса Т1 образуют систему сходящихся сил на плоскости. Составим для нее уравнения равновесия: åFkx = 0; T1 – P1 ´ sin 450 = 0 åFky = 0; N - P ´ cos 450 = 0 Из них: T1= P ´ sin 450 = 42 H N= P ´ cos 450 = 42 H
Статическое равновесие блока 2
Рассмотрим статическое равновесие блока 2:
Силы Р2, F, реакции XA, YA шарнира А и реакции тросов Т1, Т2 образуют произвольную плоскую систему сил. Составим три уравнения равновесия:
åFkx = 0; XA - F ´ sin600 – T1 ×cos450 = 0 åFky = 0; YA + F ´ cos600 – T1 ´ sin450 –T2= 0 åMA = 0; F × h + T1 × r2 - T2 × R2 = 0 h = AE = AK ×cos450 = l ×cos450 = 0,14 м
Вычислим неизвестные:
XA = F × sin 600 - T1 ´ cos 450 - = -21,4 H T2 = (F × h + T1 × r2 ) / R2 =24,5 H YA = -F ´ cos600 + T1 ´ sin450 + T2 = 45,9 H
Статическое равновесие блока 3
Рассмотрим статическое равновесие блока 3:
Сила тяжести Р3, пара сил с моментом М, реакции XВ, YB шарнира В и реакция троса Т2 образуют произвольную плоскую систему сил. Составим уравнения равновесия: åFkx = 0 åFky = 0; YВ – P3 + T2 = 0 åMB = 0; M –T2 R3 = 0
Вычислим неизвестные:
XВ = 0 Н YВ = P3 - T2 = 15,5 H M = T2 ´ R3 = 7,35 H´м
Кинематический расчет механизма
Все силовые нагрузки сняты. Груз 1 начинает движение по закону x1(t). Для момента времени t1 = 1c определить: 1. Скорость и ускорение груза 1; 2. Угловые скорости и угловые ускорения блоков 2 и 3; 3. Скорость и ускорение точки С; 4. Абсолютную скорость и абсолютное ускорение точки С, учитывая, что при t1 = 1c точка С начинает дополнительное перемещение относительно блока 3 по закону ОС = St(t).
Определение скорости и ускорения груза 1
Закон движения груза 1:
Скорость груза 1:
Ускорение груза 1:
Определение угловых скоростей и угловых ускорений блоков 2 и 3
Угловая скорость блока 2:
Угловое ускорение блока 2:
Исходя из схемы механизма, получаем зависимость:
Угловая скорость блока 3:
Угловое ускорение блока 3:
Определение скорости и ускорения точки С
Скорость точки С:
Нормальная составляющая ускорения точки С:
Касательная составляющая ускорения точки С:
Ускорение точки С:
Вычисление абсолютной скорости и абсолютного ускорения точки С
Положение точки С:
Абсолютная скорость точки С определяется по формуле:
Относительная скорость точки С:
Переносная скорость точки С:
Абсолютная скорость точки С:
Модуль абсолютного ускорения определяется по формуле:
Относительное касательное ускорение точки С:
Относительное нормальное ускорение точки С:
Переносное касательное ускорение точки С:
Переносное нормальное ускорение точки С:
Модуль ускорения Кориолиса:
Направление ускорения Кориолиса определяем по правилу Жуковского. Модуль абсолютного ускорения:
Динамический расчет механизма
1. Учитывая данные таблицы и найденные кинематические параметры, вычислить для момента времени t1 = 1c кинетическую энергию механизма. 2. Вычислить работу всех сил, приложенных к механизму, при том его перемещении, когда груз 1 опустится на величину S.
Вычисление кинетической энергии системы
Груз 1 движется поступательно, значит его кинетическая энергия запишется в виде:
Блоки 2 и 3 неоднородны и вращаются вокруг неподвижных осей. Кинетическая энергия блока 2:
Кинетическая энергия блока 3:
Кинетическая энергия всей системы:
Вычисление работы сил при спуске груза 1 на расстояние S
Работа сил тяжести груза 1:
Работа силы F:
Работа момента M:
Сумма работ всех сил:
|
|||||
|
|
Последнее изменение этой страницы: 2016-09-13; просмотров: 431; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.21.37.252 (0.007 с.) |