
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Скоростью равномерного движения в среднем участкеСодержание книги
Поиск на нашем сайте
Отклонением точки останова от заданного значения, называемой точностью останова (правильнее было бы «неточностью останова»). Иногда ставится задача минимизации одного из параметров при ограничениях на другие параметры: например, минимизировать затраченное время (п.1) при отклонении (5) не более заданного значения. Практическое решение подобных задач часто осложняется такими условиями, как случайные помехи, называемыми иногда «возмущениями», например, перемещения в условиях вибрации, толчков, изменений температуры и т.д. Один из ярких примеров возмущений – качка судна во время волнения при стрельбе из орудий. Следует отметить, что уменьшение влияния возмущений является основной задачей систем управления с отрицательной обратной связью. В принципе, отрицательная обратная связь ослабляет всякие отклонения от цели, так как усиленное рассогласование действует на объект управления, возвращая его в заданное состояние. Рассмотренная ранее схема управления ПИД для нагревателя служит для решения указанной задачи минимизации времени при заданной точности. То же самое применимо к управлению движениями объектов. Минимизация времени движения предполагает увеличение скорости движения и соответственно ускорений и усилий при заданной массе объекта. Это требует увеличения мощности исполнительных элементов, а она, как правило, ограничена. Это касается не только разгона, но и торможения, когда нужно убрать кинетическую энергию, сообщенную объекту при разгоне. При недостаточной мощности торможения объект в силу инерции перебегает дальше заданной точки останова. Чтобы исключить или уменьшить перебег, нужно правильно выбрать начало торможения.
Рисунок 44. Завершение движения. На рис.44 слева показано 2 случая завершения движения: 1 – плавный подход к заданному значению Uo (асимптотический), 2 – колебательный. Второй происходит быстрее, но за счет инерции возникает перебег, который нужно исправлять и возвращаться назад и т.д. Справа показана типичная форма импульсов цифрового электронного устройства. Эти правила мы знаем и чувствуем с раннего возраста, однако у человека может не хватить скорости реакции, тогда как автоматические устройства, в том числе с управляющими ЭВМ успевают решать задачи. Кроме того, они работают точнее, благодаря применению математических методов расчета, управляющих устройств, построенных на их основе, и управляющих ЭВМ, в программах которых учтены различные факторы.
Билет 15 Система SCADA Это международный стандарт на построение АСУ, включая САУ. Можно сказать, что в нем учтены ранее указанные взгляды на построение системы снизу и сверху. В этом стандарте накоплен опыт построения АСУ с учетом перспективы развития компьютерных сетей, с учетом использования самого разнообразного оборудования и модульного принципа построения систем. Следует иметь в виду, что в настоящее время производится очень большой ассортимент различного оборудования, в том числе и электронного, многочисленными предприятиями (фирмами), но оно недостаточно стандартизовано. Такое нестандартное оборудование одних фирм не стыкуется с аналогичным оборудованием других фирм, что создает у пользователей зависимость от производителей и не всегда выгодно пользователям. Применение стандартного оборудования устраняет эти трудности для пользователей. Рассмотрим простой пример системы [1], показанной на рис. 61. На артезианской скважине, расположенной за чертой города, установлен насос (pump), который должен обеспечить определенный объем воды в единицу времени - расход (л/мин - flow). Датчик F-1 измеряет текущее значение расхода, а УЭВМ (PLC-1), изменяя частоту вращения электродвигателя насоса, поддерживает заданное значение (setpoint) расхода. Вода от насоса поступает в бак, где другая САУ с PLC- 2 поддерживает определенный уровень воды в баке, измеряемый датчиком L (level), открывая или закрывая вентиль (valve) V-2, подающий воду потребителям. В системе SCADA указанные САУ образуют нижний уровень управления. УЭВМ в виде ПЛК (PLC), цифровых сигнальных процессоров (DSP) или других ЭВМ называются в общем виде RTU (Remote Terminal Unit – удаленное терминальное устройство). Эти устройства связаны с центром управления по компьютерной сети, ЭВМ центра получает и накапливает данные о расходе воды в колодце и об уровне воды в баке. Эта ЭВМ показывает данные управляющему персоналу, который на основании этих и других данных (например, об ожидаемом расходе воды, об ожидаемой погоде и т.д.) принимает решение о заданных значениях (setpoint) расхода и уровня в текущее время и передает их по сети в RTU. Сокращение SCADA расшифровывается как “supervisory control and data acquisition” – «управление и сбор данных». Это название предполагает управление с участием человека (АСУ), поэтому важной частью является HMI (Human-Machine Interface) – интерфейс человек-ЭВМ. Сюда входят различные графические средства отображения информации (видеоподсистема ПК с экранами и программным обеспечением), средства ввода информации. На экранах обычно наглядно показывается схема управляемых объектов, как на рис. 61, и текущие значения управляемых параметров. Для облегчения принятия решений персоналом имеется еще база данных, например о предыстории событий, а также различные системы принятия решений.
Как и в любой реальной системе управления, большое внимание уделяется вопросам безопасности и надежности работы. Всегда существует опасность аварий, поэтому предусматриваются меры по обнаружению и устранению аварийных ситуаций, например, может отказать электродвигатель насоса вследствие исчезновения напряжения в электросети и т.д. В этом случае нужно принимать срочные меры, например, включить насос с другого колодца. Это может предпринять центр управления. В системе SCADA специально предусмотрены средства аварийной сигнализации и возможности устранения последствий аварий, например, дублирование (резервирование). SCADA предполагает охват объектов на значительном пространстве, например в системе водоснабжения городом, как в данном примере. Поэтому одной из важнейших ее функцией является передача данных. В настоящее время здесь используются последние достижения в области компьютерных сетей и стандартные решения на базе Internet (TCP/IP-based SCADA networks) и Ethernet. Поскольку Internet – глобальная сеть, то возникает угроза вмешательства извне в работу системы управления. Особенно опасны злонамеренные вмешательства, например со стороны хакеров. Против этого применяются стандартные меры информационной безопасности (Information Security): специальные промышленные брандмауэры (specialized industrial firewall) и VPN, а также усовершенствованное шифрование сообщений (Advanced Encryption) [1]. Сквозной акустический такт Рассмотрим полную задачу записи и воспроизведения звука с помощью ЭВМ, как показано на рис.18. Слева в микрофон поступает звук, справа из громкоговорителя его слушают. См. приложение. Необходимо добиться максимального совпадения обоих звуков, разница между этими звуками является искажением звука. Высокое качество звука означает минимальные искажения и называется высокой верностью воспроизведения (high fidelity – HF). Поскольку этот вопрос непростой, обратимся сначала к свойствам самого слушателя. Схема внутреннего уха человека, так называемой улитки, в развернутом виде показана на рис.19 [6]. Ее можно представить как рупор, свернутый наподобие музыкальной трубы (волторны) для компактности. Улитка состоит из отдельных волокон, каждое из которых колеблется, отзываясь на звук определенной частоты (резонирует). На рис. 19 показаны резонансные частоты волокон (f, Герцы) в зависимости от расстояния от начала улитки (t, мм).
Рисунок 19. Свойства слуха человека Колебания каждого волокна раздражают свое нервное окончание, которое посылает сигналы в мозг человека. Всего этих окончаний более 20000. Эти сигналы анализируются в мозгу, создавая слуховые восприятия. Можно представить, что наше ухо разлагает звук на отдельные колебания определенных частот. Воспринимаемый слухом частотный диапазон составляет 16…20 Гц – 20 000 Гц. В этом диапазоне человек запоминает 100 - 150 градаций частоты. Наш слух очень тонко воспринимает малейшие изменения звука, которые даже трудно воспринять и создать приборами, например, звуки электронных музыкальных инструментов пока еще существенно уступают по красоте акустическим музыкальным инструментам, не говоря уже о голосе человека.
Аналогично сказанному о внутреннем ухе, при математическом анализе звуковых колебаний их представляют в виде суммы отдельных синусоидальных функций (гармоник), каждая из которых имеет свою амплитуду, частоту и фазу. Это соответствует разложению исходной функции в ряд Фурье [7]. Напряжение на выходе микрофона, воспринимающего звук, описывается формулой n U(t) = ∑ Ai ∙ sin (i∙ω∙t + Ψi) i=1 где: U(t) - текущее значение напряжение на выходе микрофона, i - номер составляющего гармонического (синусоидального) колебания (гармоники); n - максимальный номер; t - время; Ai - амплитуда гармоники; ω - угловая частота первой гармоники; Ψi - начальная фаза гармоники. Считается, что фазу гармоники человек не воспринимает при оценке тембра звука, так как фаза звука используется для определения направления источника звука (бинауральный эффект). Одна и та же звуковая волна поступает в оба уха человека с некоторым сдвигом во времени, так как наши уши разнесены на расстояние более 10 см. Этого достаточно, чтобы воспринимался сдвиг по фазе звуковых сигналов в обоих ушах. Далее наша нервная система создает у нас чувство направления на источник звука, иногда приходится поворачивать голову, чтобы точнее определить место источника звука. При этом на низких частотах при длинах звуковых волн значительно больших расстояния между нашими ушами разница по фазе между обоими звуковыми сигналами в каждом ухе невелика. Поэтому местоположение источника низких звуков определить значительно труднее, чем высоких звуков. Это используется в объемных акустических системах для экономии низкочастотных каналов, особенно низкочастотных громкоговорителей (subwoofer). Можно иметь только один мощный низкочастотный громкоговоритель и несколько среднечастотных (woofer) и высокочастотных (tweeter) громкоговорителей. Билет 16 1. Асинхронный электродвигатель (принцип работы, достоинства, относительный недостаток, скольжение)
См Билет 2 2. Физический принцип работы флеш-памяти, основные параметры См Билет 7 Билет 17 1. График движения между двумя точками, торможение См. Билет 12 Терморегулирование Задачи терморегулирования очень распространены: наши жилища, электростанции, котельные, литейное и химическое производство, металлургия и т.д. На рис. 30 показан внешний вид и схема применения одного из типичных терморегуляторов ТРМ251 [10], а на рис. 31 приведены его технические характеристики. ТРМ251 рассчитан на работу в компьютерной сети и содержит в себе микропроцессор. Рисунок 31. Технические характеристики терморегулятора ТРМ251 Билет 18 1. Пример системы управления с отрицательной обратной связью. Рассмотрим пример такой системы из области теплотехники, скажем, небольшой лабораторный электронагреватель. Его можно получить из стабилизатора напряжения по рис.27, если увеличить максимальное выходное напряжение до 30 В, а в цепь обратной связи включить преобразователь температуры в электрическое напряжение, который называется обычно “датчиком температуры”. Коэффициент передачи такого датчика в данном примере Кос=0,05 В/ 0С. Структурная схема системы на рис.28 будет иметь классический вид рис.13. В отличие от предыдущего примера здесь в контур управления дополнительно включены: камера нагревания и датчик температуры, имеющие коэффициент передачи, зависящий от времени, что в общем виде называется передаточной функцией [9]. Эта функция учитывает инерционность указанных элементов. Напряжение с выхода датчика подадим на инвертирующий вход 9 операционного усилителя, а на прямой вход 10 подадим напряжение U1, изображающее заданную температуру, например 500С. Заданное значение управляемого параметра называют “уставка”. Тогда U1=Кос∙ 50=2,5В. Коэффициент усиления примем К=20. Непосредственное нагревание камеры нагревателя создает резистор нагрузки Rн = 10 ом, по которому протекает ток Iн. Этот резистор можно считать исполнительным элементом.
Первоначальную температуру нагревателя в выключенном состоянии примем 200С. При включении нагревателя значение рассогласования ε = U1 – Uос = 2,5В –200∙ 0,05 В/ 0 = 1,5 В. Напряжение на резисторе нагревателя Uн = ε ∙ К = 1,5В ∙ 20 = 30В, ток через него Iн = 30В/10ом = 3 А. Выделяемая мощность Р = 30В ∙ 3А = 90 Вт, которая идет на нагревание камеры нагревателя. Ее температура начинает расти, соответственно растет напряжение на выходе датчика температуры, рассогласование начинает падать, напряжение Uн на резисторе Rн тоже начинает падать. В квадрат раз падает мощность на Rн, Рн = Uн2/Rн, скорость нагревания уменьшается. Этот процесс показан на графике справа как кривая 1. При заданной температуре 500С потери энергии в нагревателе вследствие ухода в окружающую среду составляют около
зависимости коэффициента передачи от частоты сигнала, эта зависимость называется амплитудно-частотной характеристикой (АЧХ), например на рис.21,
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 285; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.225.235.157 (0.011 с.) |




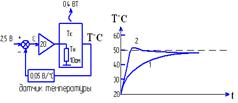 Рисунок 28. Нагреватель с САУ
Рисунок 28. Нагреватель с САУ = 0,4 Вт. Для получения такой мощности на Rн = 10 ом требуется напряжение U =
= 0,4 Вт. Для получения такой мощности на Rн = 10 ом требуется напряжение U =  = 2В. Этому соответствует рассогласование ε = 2В/К=2В/20=0,1В, тогда напряжение обратной связи Uос=U1- ε = 2,5В – 0,1В = 2,4В. Этому соответствует температура нагревателя 2,4В/Кос = 2,4/0,05 = 480С. Таким образом рост температуры остановится на 480С, произойдет недогрев, неточность системы составит 20С (4%). Нетрудно увидеть, что повышение коэффициента усиления в 2 раза с К=20 до К=40 повысит точность системы в 2 раза, получим неточность 10С (2%). Эту постоянную неточность можно снизить еще, если интегрировать рассогласование в установившемся режиме и затем использовать этот интеграл. Нечто аналогичное мы бы делали при ручном управлении, добавляя к заданной температуре 10С, то есть устанавливая заданную температуру не 500С, а 510С. Нам может захотеться ускорить процесс нагревания. Например, если бы нагреватель продолжал, как сначала, выделять 90 Вт, то график пошел бы по кривой 2, что значительно быстрее. Но как остановить процесс нагревания? Если выключить нагреватель в момент достижения заданной температуры, то некоторое время он будет продолжать негревание камеры, так как температура внутри него Тн гораздо больше, чем в камере Тк. В противном случае теплоэнергия не переходила бы от него в камеру. Однако в этом случае происходит перегрев камеры. Это может оказаться недопустимым с точки зрения проводимого химического процесса в камере. Кривая 1 соответствует варианту очень осторожного нагревания, который дает именно отрицательная обратная связь и постоянство коэффициента К (пропорциональность). Для повышения скорости работы нагревателя и точности работы системы управления учитывают величину скорости изменения рассогласования, то есть дифференцируют рассогласование по времени. Здесь необходимо учитывать влияние такого фактора, как инерционность объекта управления, обусловленную тем, что: теплоемкость камеры с ее содержимым и ограниченная мощность нагревателя затягивают процесс нагревания и после отключения нагревателя он продолжает греть некоторое время. При управлении движениями объектов (промышленных роботов, станков с ЧПУ) также приходится учитывать их инерционность (это рассматривается в дальнейшем). В рассматриваемых системах управления получила широкое распространения так называемая схема ПИД (пропорциональная, интегральная, дифференциальная), которая повышает скорость и точность работы. Основное представление о ней мы получили из примера электронагревателя (рис. 28). Можно сказать, что система автоматического управления ПИД была реализована схемно путем соединения основных элементов в замкнутую систему с отрицательной обратной связью в соответствии с рис.13. Для учета интеграла и производной от рассогласования применяют специальные схемные решения, например, целые замкнутые контуры со своими датчиками и корректирующие элементы схем. Система управления с обратной связью подвержена самовозбуждению, аналогично усилителям, рассмотренным ранее. Связанные с этим вопросы относятся к устойчивости систем управления. Условия и причины самовозбуждения были рассмотрены ранее на рис.15 и 16. Существует несколько методов анализа устойчивости, они предусматривают построение и анализ двух зависимостей для разомкнутой системы в заданном диапазоне частот:
= 2В. Этому соответствует рассогласование ε = 2В/К=2В/20=0,1В, тогда напряжение обратной связи Uос=U1- ε = 2,5В – 0,1В = 2,4В. Этому соответствует температура нагревателя 2,4В/Кос = 2,4/0,05 = 480С. Таким образом рост температуры остановится на 480С, произойдет недогрев, неточность системы составит 20С (4%). Нетрудно увидеть, что повышение коэффициента усиления в 2 раза с К=20 до К=40 повысит точность системы в 2 раза, получим неточность 10С (2%). Эту постоянную неточность можно снизить еще, если интегрировать рассогласование в установившемся режиме и затем использовать этот интеграл. Нечто аналогичное мы бы делали при ручном управлении, добавляя к заданной температуре 10С, то есть устанавливая заданную температуру не 500С, а 510С. Нам может захотеться ускорить процесс нагревания. Например, если бы нагреватель продолжал, как сначала, выделять 90 Вт, то график пошел бы по кривой 2, что значительно быстрее. Но как остановить процесс нагревания? Если выключить нагреватель в момент достижения заданной температуры, то некоторое время он будет продолжать негревание камеры, так как температура внутри него Тн гораздо больше, чем в камере Тк. В противном случае теплоэнергия не переходила бы от него в камеру. Однако в этом случае происходит перегрев камеры. Это может оказаться недопустимым с точки зрения проводимого химического процесса в камере. Кривая 1 соответствует варианту очень осторожного нагревания, который дает именно отрицательная обратная связь и постоянство коэффициента К (пропорциональность). Для повышения скорости работы нагревателя и точности работы системы управления учитывают величину скорости изменения рассогласования, то есть дифференцируют рассогласование по времени. Здесь необходимо учитывать влияние такого фактора, как инерционность объекта управления, обусловленную тем, что: теплоемкость камеры с ее содержимым и ограниченная мощность нагревателя затягивают процесс нагревания и после отключения нагревателя он продолжает греть некоторое время. При управлении движениями объектов (промышленных роботов, станков с ЧПУ) также приходится учитывать их инерционность (это рассматривается в дальнейшем). В рассматриваемых системах управления получила широкое распространения так называемая схема ПИД (пропорциональная, интегральная, дифференциальная), которая повышает скорость и точность работы. Основное представление о ней мы получили из примера электронагревателя (рис. 28). Можно сказать, что система автоматического управления ПИД была реализована схемно путем соединения основных элементов в замкнутую систему с отрицательной обратной связью в соответствии с рис.13. Для учета интеграла и производной от рассогласования применяют специальные схемные решения, например, целые замкнутые контуры со своими датчиками и корректирующие элементы схем. Система управления с обратной связью подвержена самовозбуждению, аналогично усилителям, рассмотренным ранее. Связанные с этим вопросы относятся к устойчивости систем управления. Условия и причины самовозбуждения были рассмотрены ранее на рис.15 и 16. Существует несколько методов анализа устойчивости, они предусматривают построение и анализ двух зависимостей для разомкнутой системы в заданном диапазоне частот:


