Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выбор инструкции и её выполнение,Содержание книги
Поиск на нашем сайте
Билет 1 1. Управляющие ЭВМ, требования к ним по сравнению с ПК По аналогии с человеком управляющая ЭВМ выполняет функции его нервной системы, органы чувств человека – это датчики САУ, а руки и ноги – исполнительные элементы САУ. Быстрое развитие ЭВМ существенно изменило САУ в сторону цифровой техники, как и остальные области, например телекоммуникации (связь). Если сравнить типичные требования к ЭВМ в САПР и в управлении, то можно заметить большую разницу: 1. УЭВМ работают в реальном масштабе времени, например, при управлении движением объекта нужно вычислить координаты следующей точки его траектории в момент пребывания его в предыдущей точке; 2. надежность УЭВМ должна быть очень высокой, так как ошибку исправлять, как правило, бывает некогда или невозможно; в САПР исправление ошибок – обычная процедура; с другой стороны, в управлении потери от ошибки бывают очень большими, например на транспорте или в энергосистеме; 3. условия окружающей среды для УЭВМ часто бывают неблагоприятными, например, на подвижных транспортных средствах, особенно водных или на химическом производстве; вообще, автоматизацию нужно проводить в первую очередь там, где находиться человеку опасно для жизни или здоровья (на шахтах, под водой и т.д.); 4. УЭВМ, как правило, связана с одним определенным производственным механизмом и выполняет одну определенную программу, тогда как в САПР ЭВМ работает в мультипрограммном режиме под управлением сложной операционной системы, имеет накопители информации большого объема.
Если подытожить кратко, то управляющая ЭВМ должна иметь максимальное быстродействие и надежность при минимальной стоимости. Отсюда понятно, что в качестве УЭВМ используются небольшие ЭВМ, часто в одной микросхеме. Программа работы УЭВМ хранится в ПЗУ, что снимает проблему вирусов и не требуется дисков. Нередко УЭВМ имеет максимально простой интерфейс с человеком (несколько светодиодов и кнопок), может и вовсе его не иметь, так как связана только с управляемым объектом, например с электродвигателем. В качестве УЭВМ широко используются ПЛК, а также «цифровые сигнальные процессоры (ЦСП)» (digital signal processors - DSP), например TMS320, фирмы Texas Instruments [16,17], одной из старейших в области микроэлектроники, начало выпуска TMS320 - 1982 г. ЦСП широко используются также в звуковых системах, в том числе в ПК. В центре сквозного акустического тракта (рис. 18) находится ЭВМ, на входе которой включен АЦП (аналого-цифровой преобразователь), а на выходе – ЦАП (цифро-аналоговый преобразователь), это и есть основная схема ЦСП. Он существенно доработан с целью получения максимального быстродействия. TMS320 представляет собой целую серию различных микросхем, позволяющих строить самые разнообразные системы для многочисленных приложений. В этих системах используется как архитектура фон-Неймана, так и Гарвардская, дающая большее быстродействие. Аналогично в ПК также используются обе архитектуры – ОЗУ соответствует первой, а кэш первого уровня – второй. Основной вид операции в TMS320 A = BC + D, выполняемой за один такт, существенное достижение здесь в том, что за один такт выполняется умножение. Для многих практических задач управления используется 16-разрядное представление величин с фиксированной точкой (16-bit fixed-point). С целью повышения точности может применяться и 32-разрядное представление с плавающей точкой (32-bit floating-point), такое представление используется при работе со звуком. Для ускорения работы ЦСП применяется также конвейер команд (pipeline). TMS320 модификации C240 нашел применение в частотно-регулируемом приводе с асинхронным электродвигателем (Induction Motor). Управляющая программа разработана на языке ассемблера для TMS320. Переменные величины представлены 16 разрядами с фиксированной точкой. Работа программы синхронизирована прерываниями от внутреннего таймера. Программа занимает 3К слов в ПЗУ, объем ОЗУ данных – 544 слова. Используется 50% производительности TMS320, один цикл управляющей программы выполняется за 35 мс. Показатели привода: диапазон частоты вращения 0-12 000 об/мин, к.п.д. инвертора (power electronic stage) – 95%, к.п.д. всего привода > 85%. В качестве УЭВМ широко используются также ПЛК (программируемые логические контроллеры, PLC). Хотя их название предполагает в основном выполнение логических операций, они также могут выполнять арифметические операторы и во многом сходны с ЦСП. Один из употребительных языков их программирования – язык контактных схем («лестничных диаграмм») с логическими операторами (рис. 2). Как было указано для привода ЧРЭ SB-19, в системе одновременно могут работать и ЦСП и ПЛК. УЭВМ могут работать с большим количеством входной информации, что предполагает часто большое количество датчиков. По этой причине УЭВМ имеет развитый ввод/вывод стандартных типов: программный и по прерываниям, особенно от таймера. В каналах вола/вывода могут присутствовать ЦАП и АЦП. Предшественниками таких ЭВМ можно считать широко распространенные в70-х, 80-х годах прошлого века мини-ЭВМ, например 16 разрядную PDP-11. Такие мини-ЭВМ имели размер одного шкафа, что было большим прогрессом по сравнению с десятками шкафов других ЭВМ, называемых теперь “main frame”. Мини-ЭВМ широко применялись в автоматизации научных экспериментов, имели хорошо развитый ввод/вывод, для подключения многочисленных датчиков (измерительных приборов). Регистры внешних устройств и ячейки ОЗУ входили в единое адресное пространство, что позволяло программе работать с ними по единой системе адресации. ЭВМ PDP-11 и более мощные WAX производились фирмой DEC, одной из ведущих в мире. Однако позже она потеряла финансовую самостоятельность и вошла в состав фирмы НР. Существует также тенденция использования в управлении на всех его уровнях электроники персональных компьютеров (ПК) (процессоров, чипсета и т.д.) в виде одноплатных «промышленных ЭВМ (Industrial Computer)» и многоплатных ЭВМ, аналогично ПЭВМ. Конструкция промышленной ЭВМ существенно отличается от обычной в сторону высокой надежности, например промышленный компьютер PEAK 870VL2 на базе Pentium 4 фирмы Nexcom [18]. Они имеют прочную, закрытую оболочку, стойкую против влаги, газов, вибрации и т.д. Вопросы использования таких ЭВМ при размере программ в несколько килобайт, как выше для TMS320, требует серьезного экономического обоснования. Здесь многое зависит от перспектив расширения работ, если намечается построение большой системы, то использование промышленных ЭВМ может быть выгодным, поскольку нужно будет сразу закладывать построение цифровой инфраструктуры (Digital Infrastructure) в виде надежной и производительной компьютерной сети, сети энергоснабжения, помещений, обучения специалистов и т.д. Немаловажный фактор здесь – экономия времени на расширение системы. Это можно представить как взгляд на систему сверху, что соответствует планомерному построению интегрированной САПР. Часто доминирует взгляд на построение системы снизу, когда начинают создавать простейшие САУ нижнего уровня. Экономически целесообразно учитывать сразу оба взгляда, чтобы в будущем избежать переделок системы. Датчики угла поворота вала У них имеются следующие характеристики: 1. зависимость выхода от входа, например, в нагревателе использован датчик температуры с коэффициентом передачи К= 0,05 вольта на градус С или К=0,05 В/оС; наличие постоянного коэффициента передачи называют термином «линейность», что соответствует графику зависимости в виде прямой линии; 2. точность преобразования входной величины в выходную; 3. время преобразования; 4. способ установки датчика на объекте управления; 5. обычные характеристики любого устройства – надежность, размеры, масса, стоимость. В отличие от исполнительных элементов, которых по типу сравнительно немного, датчиков существует великое множество. Поэтому их желательно классифицировать по различным признакам: 1. воспринимаемой на входе физической величине, которая совпадает с управляемым параметром объекта управления; например при управлении температурой эта величина воспринимается на входе; выходная величина, как правило, - электрический сигнал в виде напряжения или тока; 2. типу сигнала на выходе – аналоговый или дискретный, последний может быть цифровым, как у любого цифрового (двоичного) устройства, например ЭВМ; 3. физическому принципу работы, обычно физическому явлению, используемому для преобразования входной величины в электрическую. У всех датчиков существуют общие требования к их работе: 1. способность работы в условиях объекта управления, а эти условия часто бывают неблагоприятными, например, конечный выключатель обливается смазывающе-охлаждающей жидкостью в зоне резания металла на станке, на него падает металлическая стружка и т.д.; 2. удобное и надежное крепление на объекте управления и электрическое соединение с системой управления; 3. высокая надежность работы, достоверность; 4. обеспечение требуемой точности в течение длительного времени, как у измерительных приборов; 5. датчик не должен сам искажать состояние объекта управления, например не должен его нагревать.
Очень большой класс датчиков называют: «датчик приближения», или «бесконтактный выключатель», или «сенсор». Эти датчики дают на выходе одну логическую величину (один разряд «0 или 1») в зависимости от наличия или отсутствия материального тела около датчика, наличия или отсутствия света, магнитного поля и т.д. Например, на рис.1 такой датчик используется в качестве конечного выключателя. Движущийся объект или элемент, входя в зону чувствительности бесконтактного выключателя, вызывает его срабатывание. Узел коммутации может подавать сигнал на вход контроллера, обмотку реле, пускателя или другую нагрузку. Отсутствие механического контакта между взаимодействующим объектом и чувствительным элементом, а также электронная коммутация нагрузки обеспечивают надежность работы бесконтактного выключателя. В зависимости от вида чувствительного элемента эти выключатели подразделяются на индуктивные, емкостные, оптические и ультразвуковые. На рис. 55 показан пример различных бесконтактных выключателей. В автоматизированном электроприводе традиционно используются датчики угловой частоты вращения, называемые «тахогенераторами». Они представляют собой небольшую электрическую машину постоянного тока (рис. 47), которая механически соединена с выходным валом привода и дает на своем выходе напряжение, пропорциональное частоте вращения, как видно из выражения (1). С внедрением цифровых систем стали использоваться импульсные (инкрементные) и кодовые датчики угла поворота, показанные ниже [14]. Импульсный датчик представляет собой диск с радиальными прорезями, пересекающими тонкий луч света. Каждая прорезь дает импульс света на фотоэлемент, который преобразует его в электрический импульс. Счетчик этих импульсов накапливает текущее значение угла поворота. Если вал вращается в обе стороны, то учитывается направление вращения и используется реверсивный счетчик импульсов: импульсы в положительном направлении вращения подаются на вход +1 счетчика (инкремент), импульсы в отрицательном направлении вращения подаются на вход -1 (декремент). Частота импульсов дает частоту вращения вала. Диск кодового датчика представляет собой фотомаску с концентрическими кругами прозрачных и темных участков. Каждый круг соответствует одному двоичному разряду кода, например кода Грея. В этом коде соседние значения отличаются только по одному разряду, чтобы избежать известного явления гонок. Этот код затем может преобразовываться в двоичное число угла поворота или частоты вращения. Билет 2 1. Упрощенный критерий оценки ЭВМ, блок-схема «машины фон-Неймана», сравнение с Гарвардской архитектурой Количественной оценкой надежности ЭВМ, содержащей элементы, отказ которых приводит к отказу всей машины, могут служить следующие показатели: - вероятность безотказной работы за определенное время при данных условиях эксплуатации; - наработка ЭВМ на отказ; - среднее время восстановления машины и др.
Процессор выставляет число, хранящееся в регистре счётчика команд, на шину адреса, и отдаёт памяти команду чтения; Выставленное число является для памяти адресом; память, получив адрес и команду чтения, выставляет содержимое, хранящееся по этому адресу, на шину данных, и сообщает о готовности; Процессор получает число с шины данных, интерпретирует его как команду (машинную инструкцию) из своей системы команд и исполняет её; Если последняя команда не является командой перехода, процессор увеличивает на единицу (в предположении, что длина каждой команды равна единице) число, хранящееся в счётчике команд; в результате там образуется адрес следующей команды; Снова выполняется п. 1. Данный цикл выполняется неизменно, и именно он называется процессом (откуда и произошло название устройства). Во время процесса процессор считывает последовательность команд, содержащихся в памяти, и исполняет их. Такая последовательность команд называется программой и представляет алгоритм полезной работы процессора. Очерёдность считывания команд изменяется в случае, если процессор считывает команду перехода — тогда адрес следующей команды может оказаться другим. Другим примером изменения процесса может служить случай получения команды останова или переключение в режим обработки аппаратного прерывания. Гарвардская архитектура — архитектура ЭВМ, отличительными признаками которой являются: Выборку двух операндов, Идея, реализованная Эйкеном, заключалась в физическом разделении линий передачи команд и данных. В первом компьютере Эйкена «Марк I» для хранения инструкций использовалась перфорированная лента, а для работы с данными — электромеханические регистры. Это позволяло одновременно пересылать и обрабатывать команды и данные, благодаря чему значительно повышалось общее быстродействие компьютера. В Гарвардской архитектуре характеристики устройств памяти для инструкций и памяти для данных не требуется иметь общими. В частности, ширина слова, тайминги, технология реализации и структура адресов памяти могут различаться. В некоторых системах инструкции могут хранится в памяти только для чтения, в то время как, для сохранения данных обычно требуется память с возможностью чтения и записи. В некоторых системах требуется значительно больше памяти для инструкций, чем памяти для данных (поскольку данные обычно могут подгружатся с внешней или более медленной памяти). Такая потребность увеличивает битность (ширину) шины адреса памяти инструкций по сравнению с шиной адреса памяти данных. Архитектура была разработана Говардом Эйкеном в конце 1930-х годов в Гарвардском университете. Отличие от архитектуры фон Неймана В чистой архитектуре фон Неймана процессор одномоментно может либо читать инструкцию, либо читать/записывать единицу данных из/в памяти. То и другое не может происходить одновременно, поскольку инструкции и данные используют одну и ту же системную шину. А в компьютере с использованием гарвардской архитектуры процессор может читать инструкции и выполнять доступ к памяти данных в то же самое время, даже без кэш-памяти. Таким образом, компьютер с гарвардской архитектурой может быть быстрее (при определенной сложности схемы), поскольку доставка инструкций и доступ к данным не претендуют на один и тот же канал памяти. Также машина гарвардской архитектуры имеет различные адресные пространства для команд и данных. Так, нулевой адрес инструкций — это не то же самое, что и нулевой адрес данных. Нулевой адрес инструкций может определятся двадцатичетырехбитным значением, в то время как нулевой адрес данных может выглядеть как восьмибитный байт, который не являются частью этого двадцатичетырехбитного значения. Асинхронный двигатель Наибольшее распространение в промышленности получил асинхронный двигатель переменного тока с короткозамкнутым ротором (squirrel-cage induction motor). Честь его изобретения принадлежит М. Доливо-Добровольскому в 1890 г. Такой двигатель имеет ряд достоинств: высокий к.п.д., высокую надежность, простоту конструкции, низкую стоимость. Его недостатки - сложность регулирования частоты вращения и большие пусковые токи. В настоящее время эти недостатки преодолены, благодаря современным электронным средствам коммутации и управления с помощью ЭВМ, удешевившим частотное управление приводом (рассматривается в дальнейшем). 3 фазы напряжения и тока, подаваемые по трем проводам. Изначально на электростанции турбогенераторы создают переменное напряжение, вращая электромагнит ротора внутри 3-х фазной обмотки статора. На рис. 52 внизу показаны различные положения вращающегося ротора (полюса магнита Ю и С в соответствии со стрелкой компаса) и соответственно значения каждой из 3-х фаз тока: I1, I2, I3. Для удобства представления каждая синусоида изображается вращающимся вектором, при этом она получается как проекция на вертикальную координатную ось. Эти 3 синусоиды принято изображать, как на рис.53, а фазы обозначать латинскими буквами А, В, С. Рисунок 52. Получение 3-х фазного тока в генераторе
Рисунок 53. Трехфазная система напряжений и токов
Когда трехфазный ток попадает в аналогичную генератору трехфазную обмотку статора электродвигателя, то он также создает вращающееся магнитное поле. Но ротор двигателя построен совершенно иначе. У него изначально нет никаких магнитов, в роторе помещены короткозамкнутые толстые проводники. При включении электродвигателя в сеть вращающееся магнитное поле пересекает проводники ротора, наводя (индуцируя) в них э.д.с. (отсюда англ. название “induction motor”). Эта э.д.с. вызывает токи, которые создают магнитный поток ротора, сцепляющийся с вращающимся полем статора, которое увлекает за собой ротор и он начинает вращаться. В первый момент пуска поле статора вращается относительно ротора с максимальной частотой ω0 = 2 π f, где: f – частота электросети, равная 50 Гц (в Европе). Постепенно ротор раскручивается, разница частот вращения ротора ω1 и поля статора: ω0 – ω1 уменьшается, но она не может сравняться с нулем. Причина здесь в том, что при нулевой разнице поле статора не будет пересекать проводники ротора, не будет токов ротора и не будет сцепления ротора с полем статора. Относительную разницу частот вращения ротора и поля статора принято называть “скольжением” s = (ω0 – ω1) / ω0; 1 ≥ s ≥0. В момент пуска асинхронный короткозамкнутый двигатель потребляет большой пусковой ток, при этом s = 1. Он похож на трансформатор, у которого накоротко замкнута вторичная обмотка, в которой течет большой ток короткого замыкания (соответственно в названии двигателя “короткозамкнутый ротор”). По мере раскручивания ротора, ток в нем уменьшается, уменьшается и ток статора, потребляемый от электросети. Из-за больших бросков тока пуск асинхронного короткозамкнутого двигателя, особенно большой мощности, создает проблемы для другого оборудования, подключенного к сети, так как в сети падает напряжение. Применение частотного регулирования скорости двигателя снимает проблемы пуска. На рис.48 справа показана механическая характеристика асинхронного двигателя. В момент пуска при неподвижном роторе двигатель развивает пусковой момент Мп, показанный точкой на горизонтальной оси при ω = 0. Двигатель может раскручиваться, если момент сопротивления от нагрузки меньше Мп. На рис. 48 Мн обозначает номинальный момент нагрузки, на который рассчитан двигатель. Частота вращения растет и устанавливается в верхней точке на вертикали Мн, при этом существует некоторое скольжение. Если снять момент нагрузки М=0, то установится так называемый режим холостого хода, когда скольжение уменьшится почти до нуля, и ротор будет вращаться почти с максимальной частотой ω0. Синхронный двигатель По принципу обратимости электрических машин данный двигатель имеет то же устройство, что и синхронный генератор переменного тока на рис.52. У него такая же обмотка статора, как и у асинхронного двигателя, но ротор обычно представляет собой постоянный магнит, который жестко притягивается к вращающемуся полю статора без всякого скольжения. Частота его вращения ω0 = 2 π f независимо от момента нагрузки, поэтому он называется синхронным. Это ценно для системы управления, однако у него очень малый пусковой момент, значительно меньше, чем у асинхронного, поэтому в его роторе помещают часто еще и короткозамкнутую обмотку. Таким образом, он становится также и асинхронным при пуске. Билет 3 1. Контроллер памяти, шина процессора Контроллер памяти — цифровая схема, управляющая потоком данных к и от оперативной памяти. Может представлять собой отдельную микросхему или быть интегрирована в более сложную микросхему, например, в северный мост, микропроцессор или систему на кристалле. Контроллер памяти содержит логические цепи, необходимые для проведения операций чтения и записи в DRAM, а также для обновления хранимых в DRAM данных. Без периодических обновлений чипы памяти DRAM теряют информацию, так как разряжаются токами утечки конденсаторы, хранящие биты. Типичное время надежного хранения информации составляет доли секунды, но не менее 64 миллисекунд согласно стандартам JEDEC. На более длительных периодах времени информация сохраняется лишь частично. DRAM (Dynamic random access memory, Динамическая память с произвольным доступом) — тип энергозависимой полупроводниковой памяти спроизвольным доступом; DRAM широко используемая в качестве оперативной памяти современных компьютеров, а также в качестве постоянного хранилища информации в системах, требовательных к задержкам. Физически DRAM состоит из ячеек, созданных в полупроводниковом материале, в каждой из которых можно хранить определённый объём данных, строку от 1 до 4 бит. Совокупность ячеек такой памяти образуют условный «прямоугольник», состоящий из определённого количества строк и столбцов. Один такой «прямоугольник» называется страницей, а совокупность страниц называется банком. Весь набор ячеек условно делится на несколько областей. Как запоминающее устройство, DRAM представляет собой модуль памяти различных конструктивов, состоящий из электрической платы, на которой расположены микросхемы памяти и разъёма, необходимого для подключения модуля к материнской плате. В большинстве современных x86-систем (то есть компьютеров на базе x86-процессоров), процессор как устройство к памяти обращаться вообще не может, так как не имеет в своем составе соответствующих узлов. Поэтому он обращается к «промежуточному» специализированному устройству, называемому контроллером памяти, а уже тот, в свою очередь — к микросхемам ОЗУ, размещенным на модулях памяти. Модули вы наверняка видели — это такие длинные узкие текстолитовые «планочки» (фактически — небольшие платы) с некоторым количеством микросхем на них, вставляемые в специальные разъемы на системной плате. Роль контроллера ОЗУ, таким образом, проста: он служит своего рода «мостом»* между памятью и использующими ее устройствами (кстати, к ним относится не только процессор, но об этом — чуть позже). Как правило, контроллер памяти входит в состав чипсета — набора микросхем, являющегося основой системной платы. От быстродействия контроллера во многом зависит скорость обмена данными между процессором и памятью, это один из важнейших компонентов, влияющих на общую производительность компьютера. * — кстати, контроллер памяти физически находится в микросхеме чипсета, традиционно называемой «северным мостом». Процессорная шина Любой процессор обязательно оснащён процессорной шиной, которую в среде x86 CPU принято называть FSB (Front Side Bus). Эта шина служит каналом связи между процессором и всеми остальными устройствами в компьютере: памятью, видеокартой, жёстким диском, и так далее. Впрочем, как мы уже знаем из предыдущего раздела, между собственно памятью и процессором находится контроллер памяти. Соответственно: процессор посредством FSB связывается с контроллером памяти, а уже тот, в свою очередь, по специальной шине (назовём её, не мудрствуя лукаво, «шиной памяти») — с модулями ОЗУ на плате. Однако, повторимся: поскольку «внешняя» шина у классического x86 CPU всего одна, она используется не только для работы с памятью, но и для общения процессора со всеми остальными устройствами 2. Логарифмическая шкала, децибелы Диапазон мощностей, напряжений и токов, встречающихся в радиотехнике, слишком широк, чтобы выражать их в линейном масштабе. Поэтому на практике пользуются логарифмической шкалой, где основной единицей является децибел (1дБ равен 0,1 Б). Децибел определяет не величину мощности, напряжения или тока, а отношение между двумя значениями каждой из этих величин, при этом для соблюдения точности необходимо, чтобы эти две величины сравнивались при одинаковых значениях импеданса. Отношение выходной мощности усилителя ко входной, традиционно задается [1] в логарифмической величине - децибел: G (dB)=10 log(Pout / Pin).
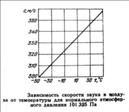
Переход к логарифмическим функциям можно обосновать рядом причин: 1. возможностью на сравнительно небольшом пространстве графика показывать большой диапазон значений величин; ниже показано два графика, первый с равномерной шкалой, второй с логарифмической
Рисунок 17. Некоторые параметры звуковых волн в воздухе
2. операции умножения коэффициентов заменять операцией сложения, как например на логарифмической линейке, которая в прошлом очень часто использовалась инженерами для вычислений, но была заменена калькулятором и ЭВМ; 3. логарифмической зависимостью ощущения громкости звука от звукового давления, например при увеличении звукового давления в 2 раза мы ощутим увеличение громкости в 0,3 раз [6], здесь берется логарифм без множителя 10. Децибелы можно представить как десятичный порядок отношения чисел, увеличенный в 10 раз. Некоторое представление об этом дает таблица 1. Таблица 1 Значения децибел G для некоторых значений отношения K двух чисел
Поскольку мощность P = U2 ∙R, то при задании усиления по напряжению в децибелах справедлива формула G (dB)=10 log(Pout / Pin)= 10 log(U2out ∙ R /(U2 in ∙ R))= 20 log(Uout / U in). Можно задавать коэффициент усиления и как обычное отношение не в децибелах. Билет 4 1. Архитектура как совместимость с кодом Архитектура процессора — количественная составляющая компонентов микроархитектуры вычислительной машины (процессора компьютера) (например, регистр флагов илирегистры процессора), рассматриваемая IT-специалистами в аспекте прикладной деятельности. С точки зрения программиста — совместимость с определённым набором команд (например, процессоры, совместимые с командами Intel х86), их структуры (например, систем адресации или организации регистровой памяти) и способа исполнения (например, счетчик команд). Наверняка вы часто встречались с термином «x86», или «Intel-совместимый процессор» (или «IBM PC compatible» — но это уже по отношению к компьютеру). Иногда также встречается термин «Pentium-совместимый» (почему именно Pentium — вы поймете сами чуть позже). Что за всеми этими названиями скрывается на самом деле? На данный момент наиболее корректно с точки зрения автора выглядит следующая простая формулировка: современный x86-процессор — это процессор, способный корректно исполнять машинный код архитектуры IA32 (архитектура 32-битных процессоров Intel). В первом приближении это код, исполняемый процессором i80386 (известным в народе как «386-й»), окончательно же основной набор команд IA32 сформировался с выходом процессора Intel Pentium Pro. Что означает «основной набор» и какие есть еще? Для начала ответим на первую часть вопроса. «Основной» в данном случае означает то, что с помощью исключительно этого набора команд, может быть написана любая программа, которая вообще может быть написана для процессора архитектуры x86 (или IA32, если вам так больше нравится). Кроме того, у архитектуры IA32 существуют «официальные» расширения (дополнительные наборы команд) от разработчика самой архитектуры, компании Intel: MMX, SSE, SSE2 и SSE3. Также существуют «неофициальные» (не от Intel) расширенные наборы команд: EMMX, 3DNow! и Extended 3DNow! — их разработала компания AMD. Впрочем, «официальность» и «неофициальность» в данном случае понятие относительное — де-факто все сводится к тому, что некоторые расширения набора команд Intel как разработчик изначального набора признает, а некоторые — нет, разработчики же программного обеспечения используют то, что им лучше всего подходит. В отношении расширенных наборов команд существует одно простое правило хорошего тона: прежде чем их использовать, программа должна проверить, поддерживает ли их процессор. Иногда отступления от этого правила встречаются (и могут приводить к неправильному функционированию программ), но объективно это является проблемой некорректно написанного программного обеспечения, а не процессора. Для чего предназначены дополнительные наборы команд? В первую очередь — для увеличения быстродействия при выполнении некоторых операций. Одна команда из дополнительного набора, как правило, выполняет действие, для которого понадобилась бы небольшая программа, состоящая из команд основного набора. Опять-таки, как правило, одна команда выполняется процессором быстрее, чем заменяющая ее последовательность. Однако в 99% случаев, ничего такого, чего нельзя было бы сделать с помощью основных команд, с помощью команд из дополнительного набора сделать нельзя. Таким образом, упомянутая выше проверка программой поддержки дополнительных наборов команд процессором, должна выполнять очень простую функцию: если, например, процессор поддерживает SSE — значит, считать будем быстро и с помощью команд из набора SSE. Если нет — будем считать медленнее, с помощью команд из основного набора. Корректно написанная программа обязана действовать именно так. Впрочем, сейчас практически никто не проверяет у процессора наличие поддержки MMX, так как все CPU, вышедшие за последние 5 лет, этот набор поддерживают гарантированно. Для справки приведем табличку, на которой обобщена информация о поддержке различных расширенных наборов команд различными десктопными (предназначенными для настольных ПК) процессорами. На данный момент всё популярное десктопное программное обеспечение (операционные системы Windows и Linux, офисные пакеты, компьютерные игры, и прочее) разрабатывается именно для x86-процессоров. Оно выполняется (за исключением «дурно воспитанных» программ) на любом x86-процессоре, независимо от того, кто его произвел. Поэтому вместо ориентированных на разработчика изначальной архитектуры терминов «Intel-совместимый» или «Pentium-совместимый», стали употреблять нейтральное название: «x86-совместимый процессор», «процессор с архитектурой x86». В данном случае под «архитектурой» понимается совместимость с определённым набором команд, то есть, можно сказать, «архитектура процессора с точки зрения программиста». Есть и другая трактовка того же термина. Существуют также полевые транзисторы с управляющим p-n переходом в затворе. Здесь применяется прием создания изоляции с помощью p-n перехода, смещенного обратным напряжением (повышающим потенциальный барьер). В этом случае диод p-n перехода включен в обратном направлении и не проводит ток.
Билет 5 Сигнальные процессоры и ПЛК См Билет 1 Цифровой сигнальный процессор (англ. Digital signal processor, DSP; сигнальный микропроцессор, СМП; процессор цифровых сигналов, ПЦС) — специализированныймикропроцессор, предназначенный для цифровой обработки сигналов (обычно в реальном масштабе времени). Особенности архитектуры: Архитектура сигнальных процессоров, по сравнению с микропроцессорами настольных компьютеров, имеет некоторые особенности: Гарвардская архитектура (разделение памяти команд и данных), как правило модифицированная; Большинство сигнальных процессоров имеют встроенную оперативную память, из которой может осуществляться выборка нескольких машинных слов одновременно. Нередко встроено сразу несколько видов оперативной памяти, например, в силу Гарвардской архитектуры бывает отдельная память для инструкций и отдельная — для данных. Некоторые сигнальные процессоры обладают одним или д |
||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 314; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.132.178 (0.018 с.) |

 Архитектура фон Неймана (англ. von Neumann architecture) — широко известный принцип совместного хранения программ и данных впамяти компьютера. Отличительной особенностью архитектуры фон Неймана является то, что инструкции и данные хранятся в одной и той же памяти.
Архитектура фон Неймана (англ. von Neumann architecture) — широко известный принцип совместного хранения программ и данных впамяти компьютера. Отличительной особенностью архитектуры фон Неймана является то, что инструкции и данные хранятся в одной и той же памяти.


 Схематический разрез такого транзистора показан на рис. 25 слева, для случая n-канала. Повышение напряжения на затворе вследствие высокого обратного сопротивления p-n перехода затвора практически не создает тока затвора. Оно отталкивает дырки в подложке между истоком и стоком, но привлекает электроны, создающие токопроводящий канал. Такой полевой транзистор аналогичен электронно-вакуумному триоду (рис.7) и схема его включения также аналогична, она приведена в центре рис.25. Справа на рис. 25 показан полевой транзистор с р-каналом, в нем полярности питания и смещения меняются на противоположные. Полевые транзисторы создают значительно меньший шум, чем биполярные, поэтому их применяют в первых (входных) каскадах усилителей, где сигнал мал, например, на выходе микрофона. Усилительные свойства полевых транзисторов задаются параметром “крутизна характеристики” мА/В – изменение тока исток-сток в миллиамперах на изменение напряжения исток-затвор в вольтах (это аналогично электронным лампам), например 8 ма/в для полевых транзисторов типа 2П 305. Полевые транзисторы всех типов имеют высокое входное сопротивление, значительно большее, чем биполярные транзисторы. По этой причине входные токи у них очень малы, что не нагружает источники сигнала. Это свойство позволяет работать с малыми токами и соответственно с малым потреблением энергии, что снижает нагревание и потребление энергии от источников питания. В больших интегральных цифровых схемах, таких как процессоры, это особенно ценно. Кроме того для цифровых схем создается дополнительная свобода проектирования, так как выход одного элемента можно подключать на входы многих других элементов (разветвление сигнала – fan out). Необходимо отметить, что кружок в условном графическом обозначении транзистора изображает оболочку (защитный корпус), как на рис. 12 и 25. В интегральных схемах имеется общая оболочка для многих транзисторов, поэтому для отдельных транзисторов кружки не ставятся, как, например, на рис. 24.
Схематический разрез такого транзистора показан на рис. 25 слева, для случая n-канала. Повышение напряжения на затворе вследствие высокого обратного сопротивления p-n перехода затвора практически не создает тока затвора. Оно отталкивает дырки в подложке между истоком и стоком, но привлекает электроны, создающие токопроводящий канал. Такой полевой транзистор аналогичен электронно-вакуумному триоду (рис.7) и схема его включения также аналогична, она приведена в центре рис.25. Справа на рис. 25 показан полевой транзистор с р-каналом, в нем полярности питания и смещения меняются на противоположные. Полевые транзисторы создают значительно меньший шум, чем биполярные, поэтому их применяют в первых (входных) каскадах усилителей, где сигнал мал, например, на выходе микрофона. Усилительные свойства полевых транзисторов задаются параметром “крутизна характеристики” мА/В – изменение тока исток-сток в миллиамперах на изменение напряжения исток-затвор в вольтах (это аналогично электронным лампам), например 8 ма/в для полевых транзисторов типа 2П 305. Полевые транзисторы всех типов имеют высокое входное сопротивление, значительно большее, чем биполярные транзисторы. По этой причине входные токи у них очень малы, что не нагружает источники сигнала. Это свойство позволяет работать с малыми токами и соответственно с малым потреблением энергии, что снижает нагревание и потребление энергии от источников питания. В больших интегральных цифровых схемах, таких как процессоры, это особенно ценно. Кроме того для цифровых схем создается дополнительная свобода проектирования, так как выход одного элемента можно подключать на входы многих других элементов (разветвление сигнала – fan out). Необходимо отметить, что кружок в условном графическом обозначении транзистора изображает оболочку (защитный корпус), как на рис. 12 и 25. В интегральных схемах имеется общая оболочка для многих транзисторов, поэтому для отдельных транзисторов кружки не ставятся, как, например, на рис. 24.