Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Измерение вторичного напряжения трансформатора. Внешняя характеристика.Содержание книги
Поиск на нашем сайте При колебаниях нагрузки трансформатора его вторичное напряжение Измерение вторичного напряжения трансформатора при увеличении нагрузки от х.х. до номинальной является важнейшей характеристикой трансформатора и определяется выражением
Рис. 1.37. К выводу формулы Для определения
Измерение вторичного напряжения (1.67) с учетом (1.68) примет вид
Обозначим (Uk.a./U1ном)100=Uk.a.; (Uk.p./U1ном)100=Uk.p., тогда выражение изменения вторичного напряжения трансформатора при увеличении нагрузки примет вид
Выражение (1.70) дает возможность определить изменение вторичного напряжения лишь при номинальной нагрузке трансформатора. При необходимости расчета измерение вторичного напряжения для любой нагрузки в выражение (1.70) следует ввести коэффициент нагрузки, представляющий собой относительное значение тока нагрузки b=I2/I2ном
из выражения (1.71) следует, что изменение вторичного напряжения
Рис. 1.38. Зависимость
На рис. 1.38, а представлен график зависимости
Из (1.72) следует, что наибольшее значение изменения напряжения Зависимость вторичного напряжения
Рис. 1.39. Внешние характеристики трансфоматора. Вид внешней характеристики (рис. 1.39) зависит от характера нагрузки трансформатора (cosj2). Внешнюю характеристику трансформатора можно построить по (1.72) путем расчета Пример 1.6. Для трансформатора, данные которого приведены в примерах 1.4 и 1.5, (см. § 1.11.), определить изменение вторичного напряжения при номинальной нагрузке (b=1) с коэффициентом мощности cosj2 = 1,8 для нагрузок двух характеров: активно-индуктивной и ативно-емкостной. Решение. Из примера 1.4 имеем: uk75 =5,4%; cosφk75=0,4; sinφk75 =0,92. По (1.72) при cosφ2 = 0,8 и sinφ2 = 0,6 получим: для активно-индуктивной нагрузки ∆U=5,4(0,4•0,8+0,92•0,6)=4,65%; для активно-емкостной нагрузки ∆U=5,4[0,4•0,8+0,92•(-0,6)]=-1,2%. В результате аналогичных расчетов, проделанных при β=0÷1,2, для нагрузок с cosφ2, равным 0,7; 0,8; 0,9 и 1,0, получены данные, по которым построены графики ∆U = f(β), представленные на рис 1 38, а. Наибольшее изменение напряжения соответствует активно-индуктивной нагрузке с cosφ2 = cosφk75 = 0,40 и коэффициенту нагрузки β = 1 (перегрузка трансформатора недопустима) ∆U тax = uk75= 5,4% (см рис. 1.38,6)
Устройство асинхронного двигателя (АД). Фазный и короткозамкнутый ротор. Принцип действия асинхронного двигателя (АД). Поместим между неподвижными катушками (рис.7.4) в области вращающегося магнитного поля укрепленный на оси подвижный металлический цилиндр – ротор. Пусть магнитное поле вращается «по часовой стрелке», тогда цилиндр относительно вращающегося магнитного поля вращается в обратном направлении. Учитывая это, по правилу правой руки найдем направление наведенных в цилиндре токов. На рисунке 7.4 направления наведенных токов (вдоль образующих цилиндра) показаны крестиками («от нас») и точками («к нам»). Применяя правило левой руки (рис. 7.1,б), получаем, что взаимодействие наведенных токов с магнитным полем порождает силы F, приводящие во вращательное движение ротор в том же направлении, в каком вращается магнитное поле. Частота вращения ротора
Рис. 7.4. К принципу действия асинхронного двигателя
Вращающееся магнитное поле, создаваемое тремя катушками, имеет два полюса и называется двухполюсным вращающимся магнитным полем (одна фаза полюсов). За один период синусоидального тока двухполюсное магнитное поле делает один оборот. Следовательно, при стандартной частоте f1 = 50 Гц это поле делает три тысячи оборотов в минуту. Скорость вращения ротора немногим меньше этой синхронной скорости. В тех случаях, когда требуется асинхронный двигатель с меньшей скоростью, применяется многополюсная обмотка статора, состоящая из шести, девяти и т.д. катушек. Соответственно вращающееся магнитное поле будет иметь две, три и т.д. пары полюсов. В общем случае, если поле имеет р пар полюсов, то его скорость вращения будет
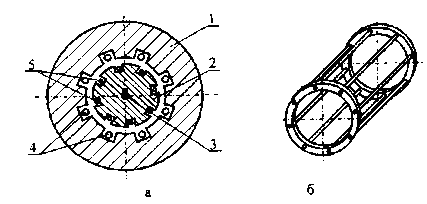
Устройство асинхронного двигателя. Магнитная система (магнитопровод) асинхронного двигателя состоит из двух частей: наружной неподвижной, имеющей форму полого цилиндра (рис. 8.5), и внутренней – вращающегося цилиндра. Обе части асинхронного двигателя собираются из листов электротехнической стали толщиной 0,5 мм. Эти листы для уменьшения потерь на вихревые токи изолированы друг от друга слоем лака. Неподвижная часть машины называется статором, а вращающаяся – ротором (от латинского stare – стоять и rotate – вращаться).
Рис. 7.5. Схема устройства асинхронного двигателя: поперечный разрез (а); обмотка ротора(б): 1 – статор; 2 – ротор; 3 – вал; 4 – витки обмотки статора; 5 – витки обмотки ротора
В пазах с внутренней стороны статора уложена трехфазная обмотка, токи которой возбуждают вращающееся магнитное поле машины. В пазах ротора размещена вторая обмотка, токи в которой индуктируются вращающимся магнитным полем. Магнитопровод статора заключен в массивный корпус, являющийся внешней частью машины, а магнитопровод ротора укреплен на валу. Роторы асинхронных двигателей изготавливаются двух видов: короткозамкнутые и с контактными кольцами. Первые из них проще по устройству и чаще применяются. Обмотка короткозамкнутого ротора представляет собой цилиндрическую клетку («беличье колесо») из медных шин или алюминиевых стержней, замкнутых накоротко на торцах двумя кольцами (рис.7.5,б). Стержни этой обмотки вставляются без изоляции в пазы магнитопровода. Применяется также способ заливки пазов магнитопровода ротора расплавленным алюминием с одновременной отливкой и замыкающих колец.
|
||
|
|
Последнее изменение этой страницы: 2016-08-14; просмотров: 893; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.89 (0.007 с.) |

 меняется. В этом можно убедится, воспользовавшись упрощенной схемой замещения трансформатора (см. рис. 1.35.), из которой следует, что
меняется. В этом можно убедится, воспользовавшись упрощенной схемой замещения трансформатора (см. рис. 1.35.), из которой следует, что 
 (1.67)
(1.67)

 , получим точку D. С некоторым допущением будем считать, что отрезок
, получим точку D. С некоторым допущением будем считать, что отрезок  представляет собой разность
представляет собой разность  , где
, где  , тогда
, тогда (1.68.)
(1.68.) (1.69)
(1.69) (1.70)
(1.70) (1.71)
(1.71) зависит не только от величины нагрузки трансформатора (b), но и от характера этой нагрузки (j2).
зависит не только от величины нагрузки трансформатора (b), но и от характера этой нагрузки (j2). при cosj2=const, а на рис. 1.38, б – график
при cosj2=const, а на рис. 1.38, б – график  при b=const. На этих графиках отрицательные значения
при b=const. На этих графиках отрицательные значения  получим еще одно выражение для расчета изменения вторичного напряжения при любой нагрузке:
получим еще одно выражение для расчета изменения вторичного напряжения при любой нагрузке: (1.72)
(1.72) имеет место при равенстве углов фазового сдвига j2=jк, тогда cos(jk-j2)=1.
имеет место при равенстве углов фазового сдвига j2=jк, тогда cos(jk-j2)=1. трансформатора от нагрузки
трансформатора от нагрузки  называют внешней характеристикой. Напомним, что в силовых трансформаторах за номинальное напряжение на зажимах вторичной обмотки в режиме х.х. при номинальном первичном напряжении (см. § 1.3.).
называют внешней характеристикой. Напомним, что в силовых трансформаторах за номинальное напряжение на зажимах вторичной обмотки в режиме х.х. при номинальном первичном напряжении (см. § 1.3.).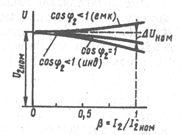
 меньше частоты вращения магнитного поля
меньше частоты вращения магнитного поля  , т.к. при одинаковых угловых скоростях относительная скорость ротора и вращающегося магнитного поля была бы равна нулю и в роторе не было бы наведенных ЭДС и токов. Следовательно, не было бы сил F, создающих вращающий момент. Рассмотренное простейшее устройство поясняет принцип действия асинхронных двигателей. Слово «асинхронный» (греч.) означает неодновременный. Этим словом подчеркивается различие в частотах вращающегося магнитного поля и ротора – подвижной части двигателя.
, т.к. при одинаковых угловых скоростях относительная скорость ротора и вращающегося магнитного поля была бы равна нулю и в роторе не было бы наведенных ЭДС и токов. Следовательно, не было бы сил F, создающих вращающий момент. Рассмотренное простейшее устройство поясняет принцип действия асинхронных двигателей. Слово «асинхронный» (греч.) означает неодновременный. Этим словом подчеркивается различие в частотах вращающегося магнитного поля и ротора – подвижной части двигателя.
 .
.