Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Методы расчетов плоских ферм.Содержание книги Поиск на нашем сайте
1)МЕТОД ВЫРЕЗАНИЯ УЗЛОВ- если вся ферма находится в равновесии, то и каждый её узел также находится в равновесии. Усилия во всех стержнях определяются последовательным вырезанием всех узлов фермы. Причём при переходе к следующему узлу выполняется аксиома сил действия и противодействия для усилий в стержнях, определённых ранее. можно рассчитывать усилия в стержнях только в таких узлах, в которых содержится не более двух стержней, усилия в которых неизвестны, независимо от того, сколько стержней закреплено в узле. Так как при расчёте усилий в стержнях, принадлежащих какому-либо узлу, заранее неизвестно, какие усилия в нем действуют сжимающие или растягивающие, то условно предполагается, что во всех рассеченных стержнях усилия растягивающие, то есть направленные в каждом стержне от узла. В результате расчета те усилия, которые будут иметь знак "+" окажутся растягивающими, со знаком "-" сжимающими недостатком является отсутствие текущего контроля правильности вычислений *2)ГРАФИЧЕСКИЙ МЕТОД ВЫРЕЗАНИЯ УЗЛОВ- то же что и МВР + Только вместо уравнений равновесия, записанных для каждого узла в аналитической форме, эти уравнения приводятся в векторном виде. Для того, чтобы найти искомые усилия, эти уравнения записываются в определенном порядке: сначала в векторной сумме идут векторы всех известных как внешних сил, приложенных к данному узлу, так и уже определенных векторов усилий в некоторых стержнях и только затем записываются векторы неизвестных еще усилий, которых не может быть больше двух. Условием равновесия каждого узла в векторном виде является замкнутость силового многоугольника, состоящего из действующих на узел внешних сил и усилий в стержнях, приложенных этому узлу. И дальше рассчитывается через силовой многоугольник. 3) МЕТОД СКВОЗНЫХ СЕЧЕНИЙ (МЕТОД РИТТЕРА)- Основная идея метода – если вся ферма находится в равновесии, то и любая её часть также сохраняет равновесие. При определении усилий в стержнях этим способом ферма рассекается сквозным сечением на две части, каждая из которых должна содержать не менее двух узлов. Классическим сквозным сечением является рассечение фермы по трем стержням. . Для определения искомых усилий одну из этих частей (как правило, более громоздкую) отбрасывают, а для оставшейся части записываются уравнения равновесия для плоской произвольной системы сил и теореме о трех моментах. Уравнения моментов записываются относительно так называемых точек Риттера. (пересечения линий действия усилий двух или более стержней) Основное достоинство этого метода заключается в том, что он позволяет независимо определить усилие в любом стержне фермы, если для него применим этот способ. Основной недостаток заключается в полном отсутствии контроля правильности вычисленных усилий в стержнях. Траектория,Перемещение,Путь. Траектория - это линия, которое описывает в пространстве тело, вследствие своего движения.(бывает фиксированной и нефиксированной) Путь — это длина участка траектории, пройденного точкой за определенный интервал времени. Путь — величина скалярная, т.е. не зависящая от выбора системы координат. Путь не может быть отрицательным и не может убывать со временем.. Равнодействующая сила при движении. На тело действует одновременно неск.сил. то их действие на движение тела можно заменить действием одной силы.Такую замену называют сложением сил. Данные силы наз.слогающими и составляют заменяющую их силу суммой равнодейств. Равнодейств.заменяет действ.несколкольких сил только по отношению к движению тела в целом равнод.сила сообщает то же ускорение что и все сост.действ на тело одновременно. А сила уравновешивающая равнод.уравновесит одновременно действие всех составляющих.
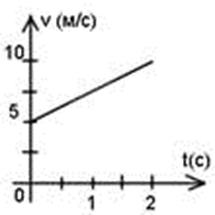
График движения, скорость и ускорение. График ускорения- графическое представление уравнения ускорения тела а = а(t).
График скорости- графическое представление уравнения скорости тела v = v(t).
Сложение сил и силовой многограник. Сложение сил. Сложение двух сил, приложенных в одной точке. Равнодействующая двух сил P1 и P2, направленных под углом Υ (фиг.17), по величине и направлению равна диагонали параллелограмма, построенного на этих силах (правило параллелограмма сил).
Сложение двух сходящихся сил. Так называются силы, линии действия которых пересекаются. Правило сложения двух сходящихся сил одинаково с правилом сложения двух сил, приложенных в одной точке, так как действие двух сходящихся сил Р1 и Р2, приложенных в точках А1 и А2 абсолютно твердого тела, можно заменить действием тех же сил, приложенных в точке пересечения их линий действия (фиг.18).
Сложение двух параллельных си л. Равнодействующая двух параллельных сил Р1 и Р2 (фиг.19, а и б), направленных в одну или в противоположные стороны, равна их алгебраической сумме R= Р1 ± Р2 и делит отрезок между точками приложения сил, внутренним или внешним образом, на части, обратно пропорциональные этим силам:
AC/P2=BC/P1=AB/R
Это правило неприменимо для равных по величине и противоположных по направлению сил. Силовой многогранник. В этом случае как и при суммировании обычных векторов начало каждого следующего вектора совмещается с коном предыдущего а сумма вектора получается «замыканием» главный вектор получается соединением начало первого вектора с концом последнего (конец и начало соединяем)
|
||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 690; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.135.208.236 (0.008 с.) |