
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Материальная точка сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока какая-нибудь сила не изменит этого состояния.Стр 1 из 4Следующая ⇒
КИНЕТИКА При изучении кинематики движения тел считалось заданным, и нас не интересовали причины возникновения или вызывающие изменение движения. Перейдём теперь к изучению причин, определяющих механическое движение. Раздел механики, изучающий эти вопросы, составляет основное содержание механики и носит название кинетики. ОСНОВНЫЕ ПОНЯТИЯ КИНЕТИКИ Причиной, вызывающей или изменяющей движение тел является действие других тел. Мерой этого взаимодействия тел является сила. Силу можно рассматривать, как меру механического взаимодействия материальных тел. Сила изменяет или вызывает движение тела или его деформацию. Понятие силы принадлежит к первичным понятиям механики и поэтому не имеет исчерпывающе полного определения. Физическая природа силы часто бывает неизвестной. Механика констатирует только реальность силы как меры действия другого тела на данное тело, не интересуясь физической сущностью того взаимодействия. Повседневный опыт убеждает нас в том, что сила характеризуется не только своей величиной, но и направлением своего действия. Следовательно, силу можно изобразить в виде вектора определенного модуля и определённого направления. Линия, на которой лежит вектор силы, называется линией действия силы. Точка материального тела, к которой приложена сила, называется точкой приложения силы. Всё многообразие сил, встречающихся в природе и технике, можно разделить на два класса. К первому классу отнесём силы, возникающие при непосредственном соприкосновении материальных тел, а ко второму – так называемые индукционные силы, или силы дальнодействия, т.е. силы взаимодействия материальных тел, находящихся на расстоянии друг от друга. К последним относятся электростатические, электромагнитные и гравитационные силы. Введение дальнодействующих сил является характерным для ньютоновской механики. В рамках ньютоновской механики никакие серьёзные попытки к объяснению природы этих сил не предпринимались. Вторым центральным понятием кинетики является понятие массы. Известно, что все тела взаимодействуют посредствам гравитационных сил. Способность тел к такому взаимодействию характеризуется тяжёлой или гравитационной массой тела, входящей в закон всемирного тяготения Ньютона: чем больше масса тела, тем сильнее оно взаимодействует с другим телом.
С другой стороны известно, что тела сопротивляются изменению движения под действием сил (обладает инертностью). Это свойство тел отражается инертной массой. Точными опытами (точность 5 . 10 -9) венгерским учёным Этвешем в 1889-1908 годах было установлено, что тяжёлая (гравитационная масса) и инертная массы пропорциональны друг другу. Соответствующим выбором системы единиц их можно сделать равными. Опыты Этвеша подтвердили принцип, который А.Эйнштейн использовал при создании общей теории относительности (принцип эквивалентности). Единицей измерения массы в СИ принят 1 килограмм: [ m ]=[1 кг ]. Эталон единицы массы представляет собой цилиндр из сплава платины и иридия. Эталон хранится в международной «Палате мер и весов» в городе Севре близ Парижа. С большой степенью точности (0,2%) масса 1 дм3 дистиллированной воды при 3,98О С равна 1 килограмму. Аксиомы механики Сформулируем основные законы механики, они были получены на основе обобщения наблюдений природы многими поколениями учёных. Они получили свою законченную формулировку в 1686 году И.Ньютоном. Аксиомы являются гениальной догадкой, а их проверка осуществляется по всей совокупности следствий, полученных из этих систем аксиом. Аксиомы Ньютона относятся к материальной точке. АКСИОМА I. ЗАКОН ИНЕРЦИИ ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ Опираясь на аксиомы механики, динамика разрабатывает главным образом следствия из второй аксиомы, которую поэтому называют основным законом динамики. Основной закон динамики сформулирован для одной материальной точки. Движение материальной точки под действием приложенных к ней сил представляет значительный интерес, так как целый ряд задач механики можно свести к задаче о движении материальной точки. Раздел динамики, в котором объектом изучения является материальная точка, называется динамикой материальной точки. Вторая аксиома механики полностью заключает в себе всё содержание этого раздела и нашей задачей является лишь представление в явном виде её следствий и приложений к решению конкретных задач.
ДВЕ ЗАДАЧИ ДИНАМИКИ МАТЕРИАЛЬНОЙ ТОЧКИ Динамика материальной точки решает две задачи: 1. По заданному закону движения определить действующие на материальную точку силы. 2. По известным силам, действующим на материальную точку найти закон движения. Характеристика сил Сила в общем случае зависит от времени, положения точки и скорости:
Однако в ряде практических случаев сила оказывается функцией лишь одного из этих аргументов. Вместе с тем часто встречаются случаи, когда сила зависит от 1. СИЛЫ, ЗАВИСЯЩИЕ ТОЛЬКО ОТ ВРЕМЕНИ: Со стороны электрического поля напряжённостью
К силам этого класса, но действующим между материальными телами можно отнести, например, двигатель с возвратно-поступательным движением своих частей действует на фундамент. Во многих случаях такие силы имеют периодический характер и поэтому представляются тригонометрическими функциями. 2. СИЛЫ, ЗАВИСЯЩИЕ ТОЛЬКО ОТ СКОРОСТИ ТОЧКИ: С такими силами мы чаще всего встречаемся тогда, когда рассматриваем движение тела в сопротивляющейся среде. Сила сопротивления со стороны среды возникает только тогда, когда имеется движение тела относительно среды. Когда относительная скорость обращается в нуль, сила сопротивления исчезает. Направлена эта сила противоположно скорости движения тела. Сила сопротивления зависит от скорости, эта зависимость в общем случае носит сложный характер. Однако, при медленном относительном движении тела силы сопротивления пропорционально скорости:
где λ – коэффициент пропорциональности, зависящий от свойств среды (в случае движения материальных тел λ зависит от формы и размеров тела). При более высоких скоростях движения такая зависимость оказывается неверной. В этом случае имеет место квадратичный или гидравлический закон сопротивления:
где, k – коэффициент пропорциональности зависящий от тех же факторов, что и При очень больших скоростях движения этот закон становится более сложным, но с достаточной степенью точности можно считать, что сила сопротивления движению точки в жидкости или газе зависит только от скорости и направлена противоположно ей. СИЛЫ, ЗАВИСЯЩИЕ ТОЛЬКО ОТ ПОЛОЖЕНИЯ ТОЧКИ: Особо важное значение имеют два типа сил этого класса: силы упругости и гравитационные силы. а) СИЛЫ УПРУГОСТИ
Для цилиндрической пружины
Знак «–» означает, что сила Одно векторное уравнение, выражающее закон Гука, эквивалентно трем уравнениям в проекциях:
Если положение точки М при отсутствии деформации совпадает с началом системы координат 0, предыдущие уравнения запишутся в виде:
Если с осью симметрии пружины совместить одну из осей декартовой системы координат (например, с осью 0X), мы получим одномерный случай для рассматриваемой задачи:
б) ГРАВИТАЦИОННЫЕ СИЛЫ
Рассмотрим точки 1 и 2
Если одна материальная точка неподвижна, то поместив её в начало системы координат:
здесь K и N – количество ячеек.
При
В итоге: И законы сохранения Общие теоремы динамики материальной точки есть логическое следствие основного закона динамики материальных тел:
ТЕОРЕМА ОБ ИЗМЕНЕНИИ И ЗАКОН СОХРАНЕНИЯ ИМПУЛЬСА МАТЕРИАЛЬНОЙ ТОЧКИ Перепишем основной закон динамики материальной точки, используя определение ускорения: Интегрируя данное уравнение по промежутку времени ∆t = t2 – t1, получим интегральную формулировку теоремы об изменения импульса материальной точки:
В проекциях на оси координат:
Из уравнения Если ТЕОРЕМА ОБ ИЗМЕНЕНИИ И ЗАКОН СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА МАТЕРИАЛЬНОЙ ТОЧКИ Моментом силы относительно произвольной точки О называют вектор
Модуль момента силы:
Момент силы направлен перпендикулярно плоскости, в которой находятся вектора  и и  . .
Здесь плечо силы – длина перпендикуляра, опущенного из начала вектора Совместив начало вектора
Аналогично моменту силы введём понятие момента импульса материальной точки:
Умножим левую и правую часть уравнения, выражающее теорему об изменении импульса материальной точки
Следовательно:
Если действует несколько сил, то:
В проекциях на оси декартовой системы координат:
Из теоремы об изменении момента импульса материальной точки следует: если момент сил, действующих на материальную точку равен нулю Работа силы. Мощность
Элементарной работой силы
В обозначении элементарной работы использована буква δ, а не d, чтобы отметить, что в общем случае линейная функция дифференциалов координат не является полным дифференциалом какой-либо функции координат. Определение элементарной работы показывает, что работа может быть: положительной, отрицательной, равной нулю в зависимости от угла
При этом мы использовали соотношение В декартовой системе координат:
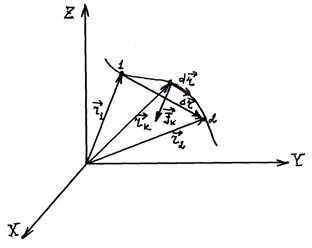
Перейдём к определению работы на конечном перемещении. Пусть точка под действием приложенной к ней силы перемещается за некоторый промежуток времени из положения 1 в положение 2. Разобьем участок траектории 1-2 на n элементов, каждому из которых будет соответствовать свой вектор перемещения Тогда работа силы при перемещении материальной точки
Знак
Точное выражение для работы на конечном участке можно получить, если перейти к пределу при условии, что
Если сила постоянная
Размерность работы:
Единица измерения работы:
Скалярную величину, которая определяет работу силы в единицу времени называют мощностью:
Размерность мощности:
Единица измерения мощности в СИ ватт:
а) РАБОТА СИЛЫ ТЯЖЕСТИ: Пусть материальная точка движется под действием силы тяжести Вычислим работу силы тяжести при перемещении материальной точки из положения 1 в положение 2:
Отсюда видно, что работа силы тяжести может быть положительной, отрицательной, равной нулю. Работа силы тяжести не зависит от формы траектории, а определяется только начальным и конечным положением материальной точки. б) РАБОТА СИЛЫ УПРУГОСТИ: Вычислим работу силы упругости, которая подчиняется закону Гука:
Это соотношение показывает, что при увеличении деформации (r2>r1) работа силы упругости отрицательна, а при уменьшении деформации (r2<r1) – положительна. В одномерном случае:
В данном примере, как и в случае силы тяжести, работа зависит только от начального и конечного положения материальной точки и не зависит от пройденного этим телом пути под действием этих сил. в) РАБОТА СИЛЫ ТРЕНИЯ Сила трения характерна тем, что её вектор всегда направлен в сторону противоположную движению:
Вычислим работу силы трения:
Если модуль силы трения постоянен, то:
В данной формуле РАБОТА КОНСЕРВАТИВНЫХ СИЛ Силовое воздействие одних материальных тел на другие может осуществляться при непосредственном контакте (силы трения) или на расстоянии (гравитационные, электромагнитные силы). Воздействие на расстоянии осуществляется посредством особой формы материи, называемой физическим полем. Физическими полями называют также силовыми. О силовом поле говорят, если каждой точке пространства можно поставить в соответствие силу, действующую на материальную точку. В механике Ньютона предполагается, что силовое воздействие передаётся от одного тела к другому мгновенно. В любой точке пространства занятого силовым полем на материальную точку действует некоторая сила. Если сила, действующая на материальную точку, зависит только от положения этой точки в пространстве и не зависит от времени, то такое поле называют стационарным. Примером стационарных полей могут служить гравитационное поле Земли или поле неподвижного электрического заряда. Среди стационарных полей особый интерес представляют такие поля, для которых элементарная работа сил поля может быть найдена как бесконечно малое изменение (дифференциал) некоторой скалярной функции координат U (x, y, z). Такие поля называют потенциальными полями.
Полный дифференциал функции имеет вид
Сопоставляя записанные выражения, получаем:
Функцию U (x, y, z) называют силовой или потенциальной функцией. Ясно, что силовая функция U (x, y, z) определяется с точностью до константы. Вектор, компоненты которого представляют собой частные производные некоторые скалярной функции по координатам, называют градиентом этой функции:
Так как в потенциальном поле элементарная работа есть полный дифференциал от силовой функции Это означает, что работа сил потенциального поля не зависит от траектории точки и от закона ее движения, а зависит только от значения силовой функции в начальном и конечном положении материальной точки и равна разности этих значений. Если точка будет перемещаться по замкнутому пути, то работа сил потенциального поля будет равна нулю, так как координаты начального и конечного положений точки при этом совпадают:
Поэтому равенство нулю работы на замкнутом пути служит признаком потенциального поля. В частности, если сила постоянна, то она обязательно потенциальна:
Силы, образующие потенциальное поле, называют консервативными силами. Результат, полученный при вычислении работы силы тяжести, показывает, что работа этой силы не зависит от пути, а определяется только начальными и конечными координатами материальной точки. Это означает, что поле силы тяжести является потенциальной, а сила тяжести является консервативной силой. В результат вычисления работы силы трения явно входит длина пути материальной почки. Это значит, что сила не является консервативной. Кинетическая энергия твёрдого тела при произвольном движении равна сумме кинетической энергии поступательного движения со скоростью центра масс и кинетической энергии вращения вокруг мгновенной оси, проходящей вокруг центра масс. МОМЕНТЫ ИНЕРЦИИ ТВЁРДЫХ ТЕЛ
1) Момент инерции тонкостенного однородного цилиндра массы m и радиусом R относительно его оси симметрии:
получаем
С учётом
4) Момент инерции однородного шара массы m радиусом R относительно оси, проходящей через его середину. Приведём конечный результат без вывода:
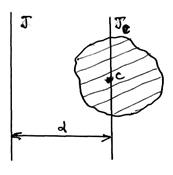
В случае, когда момент инерции необходимо найти относительно произвольной оси задача существенно упрощается, если для её решения воспользоваться теоремой Штейнера. Момент инерции тела относительно произвольной оси равен сумме момента инерции относительно оси, параллельной данной и проходящей через центр масс тела и произведения массы тела m на квадрат расстояния между осями.
Пример: в соответствии с теоремой Штейнера найдем момент инерции КИНЕТИКА При изучении кинематики движения тел считалось заданным, и нас не интересовали причины возникновения или вызывающие изменение движения. Перейдём теперь к изучению причин, определяющих механическое движение. Раздел механики, изучающий эти вопросы, составляет основное содержание механики и носит название кинетики. ОСНОВНЫЕ ПОНЯТИЯ КИНЕТИКИ Причиной, вызывающей или изменяющей движение тел является действие других тел. Мерой этого взаимодействия тел является сила. Силу можно рассматривать, как меру механического взаимодействия материальных тел. Сила изменяет или вызывает движение тела или его деформацию. Понятие силы принадлежит к первичным понятиям механики и поэтому не имеет исчерпывающе полного определения. Физическая природа силы часто бывает неизвестной. Механика констатирует только реальность силы как меры действия другого тела на данное тело, не интересуясь физической сущностью того взаимодействия. Повседневный опыт убеждает нас в том, что сила характеризуется не только своей величиной, но и направлением своего действия. Следовательно, силу можно изобразить в виде вектора определенного модуля и определённого направления. Линия, на которой лежит вектор силы, называется линией действия силы. Точка материального тела, к которой приложена сила, называется точкой приложения силы. Всё многообразие сил, встречающихся в природе и технике, можно разделить на два класса. К первому классу отнесём силы, возникающие при непосредственном соприкосновении материальных тел, а ко второму – так называемые индукционные силы, или силы дальнодействия, т.е. силы взаимодействия материальных тел, находящихся на расстоянии друг от друга. К последним относятся электростатические, электромагнитные и гравитационные силы. Введение дальнодействующих сил является характерным для ньютоновской механики. В рамках ньютоновской механики никакие серьёзные попытки к объяснению природы этих сил не предпринимались. Вторым центральным понятием кинетики является понятие массы. Известно, что все тела взаимодействуют посредствам гравитационных сил. Способность тел к такому взаимодействию характеризуется тяжёлой или гравитационной массой тела, входящей в закон всемирного тяготения Ньютона: чем больше масса тела, тем сильнее оно взаимодействует с другим телом. С другой стороны известно, что тела сопротивляются изменению движения под действием сил (обладает инертностью). Это свойство тел отражается инертной массой. Точными опытами (точность 5 . 10 -9) венгерским учёным Этвешем в 1889-1908 годах было установлено, что тяжёлая (гравитационная масса) и инертная массы пропорциональны друг другу. Соответствующим выбором системы единиц их можно сделать равными. Опыты Этвеша подтвердили принцип, который А.Эйнштейн использовал при создании общей теории относительности (принцип эквивалентности). Единицей измерения массы в СИ принят 1 килограмм: [ m ]=[1 кг ]. Эталон единицы массы представляет собой цилиндр из сплава платины и иридия. Эталон хранится в международной «Палате мер и весов» в городе Севре близ Парижа. С большой степенью точности (0,2%) масса 1 дм3 дистиллированной воды при 3,98О С равна 1 килограмму. Аксиомы механики Сформулируем основные законы механики, они были получены на основе обобщения наблюдений природы многими поколениями учёных. Они получили свою законченную формулировку в 1686 году И.Ньютоном. Аксиомы являются гениальной догадкой, а их проверка осуществляется по всей совокупности следствий, полученных из этих систем аксиом. Аксиомы Ньютона относятся к материальной точке. АКСИОМА I. ЗАКОН ИНЕРЦИИ Материальная точка сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока какая-нибудь сила не изменит этого состояния. Эта аксиома устанавливает, что для движения с постоянной по величине и направлению скоростью не требуется никаких сил. Этим вопрос о законе инерции не исчерпывается. Закон этот говорит о покое или равномерном прямолинейном движении. Поэтому сразу возникает вопрос: какая при этом имеется ввиду система координат? Рассматриваемый закон верен не во всех координатных системах. На аксиому 1 следует смотреть как на аксиому, определяющую ту систему координат, в которой справедливы законы механики. Эта система удовлетворять требованию, чтобы всякая материальная точка двигалась относительно неё прямолинейно и равномерно когда на эту точку не действуют силы. Такая система называется инерциальной. В ней справедливо утверждение, что сила является единственной причиной, изменяющей движение тела. Система, в которой, несмотря на отсутствие сил, материальная точка изменяет движение, называется неинерциальной. В частности, если говорить строго, такой является система координат, связанная с Землёй. С большой точностью система координат связанная с Солнцем и «неподвижными» звёздами является инерциальной. АКСИОМА II. ОСНОВНОЙ ЗАКОН МЕХАНИКИ В инерциальной системе координат сила, действующая на материальную точку, вызывает ускорение, пропорциональное этой силе и направленное вдоль линии её действия: Эта аксиома является основным законом динамики, связывающим динамический элемент (силу) с кинетическим элементом (ускорением). АКСИОМА III. ЗАКОН ДЕЙСТВИЯ И ПРОТИВОДЕЙСТВИЯ
Эта аксиома не содержит кинематических элементов, а значит – она справедлива для любой координатной системы (инерциальной или неинерциальной). Она открывает возможность изучения реальных тел. АКСИОМА IV. ПРИНЦИП НЕЗАВИСИМОСТИ ДЕЙСТВИЯ СИЛ
|
|||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 729; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.217.144.32 (0.138 с.) |

 , но практически её можно считать функцией лишь одной из этих переменных, т.к. остальные слабо влияют на движение. Познакомимся с некоторыми категориями сил.
, но практически её можно считать функцией лишь одной из этих переменных, т.к. остальные слабо влияют на движение. Познакомимся с некоторыми категориями сил.
 на точечный электрический заряд действует сила
на точечный электрический заряд действует сила  . Если напряжённость электрического поля зависит только от времени
. Если напряжённость электрического поля зависит только от времени  , то сила, действующая на точечный заряд, будет зависеть от времени:
, то сила, действующая на точечный заряд, будет зависеть от времени:

 ,
, ,
, .
.
 Силы упругости возникают при деформации упругих тел. Примером упругой силы может служить сила, возникающая при деформации пружины. Когда пружина находится в свободном состоянии – эта сила равна нулю. Но если пружину растянуть или сжать, то появляется сила, старающаяся вернуть её в первоначальное состояние.
Силы упругости возникают при деформации упругих тел. Примером упругой силы может служить сила, возникающая при деформации пружины. Когда пружина находится в свободном состоянии – эта сила равна нулю. Но если пружину растянуть или сжать, то появляется сила, старающаяся вернуть её в первоначальное состояние. , где ∆ l – удлинение, k – коэффициент пропорциональности – коэффициент жёсткости пружины.
, где ∆ l – удлинение, k – коэффициент пропорциональности – коэффициент жёсткости пружины. Зависимость F ~ | l | не является обязательным признаком силы упругости (например, для конической пружины такая зависимость не является линейной.) Однако в большей части практических задач приходиться рассматривать упругую силу пропорциональную деформации.
Зависимость F ~ | l | не является обязательным признаком силы упругости (например, для конической пружины такая зависимость не является линейной.) Однако в большей части практических задач приходиться рассматривать упругую силу пропорциональную деформации. Точка закрепления N неподвижна относительно XYZ.
Точка закрепления N неподвижна относительно XYZ.  – радиус-вектор точки М при отсутствии деформации пружины
– радиус-вектор точки М при отсутствии деформации пружины  – радиус-вектор точки М при наличии деформации пружины. Для силы упругости
– радиус-вектор точки М при наличии деформации пружины. Для силы упругости  – закон Гука.
– закон Гука. .
. – закон Гука.
– закон Гука.

 Гравитационные силы – силы, определяемые законом всемирного тяготения, открытым И.Ньютоном (1678 г.): две материальные точки притягиваются друг к другу с силой пропорциональной массам этих материальных точек и обратно пропорциональной квадрату расстояние между ними:
Гравитационные силы – силы, определяемые законом всемирного тяготения, открытым И.Ньютоном (1678 г.): две материальные точки притягиваются друг к другу с силой пропорциональной массам этих материальных точек и обратно пропорциональной квадрату расстояние между ними: или
или  , где
, где  – вектор, проведенный от материальной точки массой mj к материальной точке массой mi,
– вектор, проведенный от материальной точки массой mj к материальной точке массой mi,  – радиус-вектор, определяемый положение точки пространства, в которой находится материальная точка массой mi,
– радиус-вектор, определяемый положение точки пространства, в которой находится материальная точка массой mi,  – радиус-вектор, определяемый положение точки пространства, в которой находится материальная точка массой mj,
– радиус-вектор, определяемый положение точки пространства, в которой находится материальная точка массой mj,  =6,67 . 10 - 11 Н . м2/кг2 – гравитационная постоянная (впервые определена в 1798 г. Генри Кавендишем.)
=6,67 . 10 - 11 Н . м2/кг2 – гравитационная постоянная (впервые определена в 1798 г. Генри Кавендишем.)

 Такую зависимость силы от положения точки имеем и в случае взаимодействия двух точечных электрических зарядов. Однако в этом случае могут действовать как силы притяжения, так и силы отталкивания:
Такую зависимость силы от положения точки имеем и в случае взаимодействия двух точечных электрических зарядов. Однако в этом случае могут действовать как силы притяжения, так и силы отталкивания: ,
, – электрические заряды, которые могут быть как положительными, так и отрицательными; k – коэффициент пропорциональности, который зависит от выбора системы единиц.
– электрические заряды, которые могут быть как положительными, так и отрицательными; k – коэффициент пропорциональности, который зависит от выбора системы единиц. Определим гравитационную силу взаимодействия двух материальных тел.
Определим гравитационную силу взаимодействия двух материальных тел.
 ,
,




 . Общие теоремы позволяют ввести ряд новых физических понятий, что позволяет полнее раскрыть закономерности механического движения.
. Общие теоремы позволяют ввести ряд новых физических понятий, что позволяет полнее раскрыть закономерности механического движения. . Т.к. m = const, то:
. Т.к. m = const, то:  . Вектор
. Вектор  – называют импульсом материальной точки или количеством движения материальной точки.
– называют импульсом материальной точки или количеством движения материальной точки.  – дифференциальная форма теоремы об изменении импульса материальной точки: дифференциал импульса материальной точки равен элементарному импульсу силы, приложенной к ней.
– дифференциальная форма теоремы об изменении импульса материальной точки: дифференциал импульса материальной точки равен элементарному импульсу силы, приложенной к ней.

 следует, что если
следует, что если  , то
, то  . В случае, когда на материальную точку действует несколько сил:
. В случае, когда на материальную точку действует несколько сил:  .
. =0, то
=0, то  . Закон сохранения импульса материальной точки: если равнодействующая сил, приложенных к материальной точке равна нулю, то импульс материальной точки остаётся постоянным.
. Закон сохранения импульса материальной точки: если равнодействующая сил, приложенных к материальной точке равна нулю, то импульс материальной точки остаётся постоянным. , определяемый формулой
, определяемый формулой , где
, где 



 , слева векторно на радиус-вектор точки:
, слева векторно на радиус-вектор точки:

 – теорема об изменении момента импульса материальной точки в дифференциальной форме: производная по времени от момента импульса материальной точки равна моменту силы, действующей на материальную точку.
– теорема об изменении момента импульса материальной точки в дифференциальной форме: производная по времени от момента импульса материальной точки равна моменту силы, действующей на материальную точку.
 , то момент импульса материальной точки сохраняется
, то момент импульса материальной точки сохраняется  – закон сохранения момента импульса материальной точки.
– закон сохранения момента импульса материальной точки.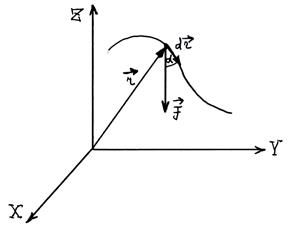 Пусть некоторая сила
Пусть некоторая сила  действует на материальную точку, которая перемещается под действием этой силы.
действует на материальную точку, которая перемещается под действием этой силы. материальной точки:
материальной точки:
 .
.
 Выражение для элементарной работы можно записать и в другом виде, используя, что,
Выражение для элементарной работы можно записать и в другом виде, используя, что,  :
:
 .
.
 . Когда материальная точка занимает k -тое положение на нее действует сила
. Когда материальная точка занимает k -тое положение на нее действует сила  .
.
 означает, что сила, действующая на материальную точку при перемещении на
означает, что сила, действующая на материальную точку при перемещении на  .
.
 , то величину
, то величину 


 .
.

 ПРИМЕРЫ ВЫЧИСЛЕНИЯ РАБОТЫ
ПРИМЕРЫ ВЫЧИСЛЕНИЯ РАБОТЫ .
.

 (положение материальной точки при отсутствии силы упругости совпадает с началом системы координат).
(положение материальной точки при отсутствии силы упругости совпадает с началом системы координат).


 , т.к.
, т.к.  >0, то
>0, то  .
. , всегда <0.
, всегда <0.
 – путь, пройденный материальной точкой за время от t 1 до t 2. Таким образом, работа силы трения зависит от пройденного материальной точкой пути.
– путь, пройденный материальной точкой за время от t 1 до t 2. Таким образом, работа силы трения зависит от пройденного материальной точкой пути. .
. .
.

 , то работа при перемещении материальной точки из положения 1 в положение 2 будет равна:
, то работа при перемещении материальной точки из положения 1 в положение 2 будет равна:  .
.
 , если
, если  Момент инерции твёрдого
Момент инерции твёрдого  тела есть характеристика самого тела вне зависимости от его вращения. Величины
тела есть характеристика самого тела вне зависимости от его вращения. Величины  и R есть функции координат; интегрирование осуществляется по всему объёму. В общем случае неоднородного (
и R есть функции координат; интегрирование осуществляется по всему объёму. В общем случае неоднородного ( . С учетом
. С учетом  ,
,
 2) Момент инерции сплошного однородного цилиндра массы m радиусом R и высотой H относительно его оси симметрии:
2) Момент инерции сплошного однородного цилиндра массы m радиусом R и высотой H относительно его оси симметрии:  . Разобьем цилиндр на бесконечно тонкие слои:
. Разобьем цилиндр на бесконечно тонкие слои: .
. , получаем:
, получаем: 
 3) Момент инерции тонкого однородного стержня массы m длиной ℓ относительно оси проходящей через его конец перпендикулярно его оси:
3) Момент инерции тонкого однородного стержня массы m длиной ℓ относительно оси проходящей через его конец перпендикулярно его оси:  .
. С учётом
С учётом  , получаем
, получаем 

 Теорема Штейнера
Теорема Штейнера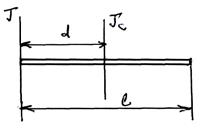

 тонкого однородного стержня относительно оси, проходящей через центр масс, если известен момент инерции
тонкого однородного стержня относительно оси, проходящей через центр масс, если известен момент инерции  относительно оси, проходящей через конец стержня. Учтём, что
относительно оси, проходящей через конец стержня. Учтём, что  :
:  . Получим:
. Получим:  .
. , где
, где  – ускорение материальной точки, m – коэффициент пропорциональности, который называют инертной массой материальной точки.
– ускорение материальной точки, m – коэффициент пропорциональности, который называют инертной массой материальной точки. Силы действия друг на друга двух материальных точек равны по модулю, направлены в противоположные стороны и имеют общую линию действия. Согласно этому закону возникновение силы обусловлено наличием по крайней мере двух материальных точек.
Силы действия друг на друга двух материальных точек равны по модулю, направлены в противоположные стороны и имеют общую линию действия. Согласно этому закону возникновение силы обусловлено наличием по крайней мере двух материальных точек.


