
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Векторная диаграмма трансформатора при холостом ходе.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Векторная диаграмма трансформатора при холостом ходе.
Рисунок 5.1 - Векторная диаграмма трансформатора при холостом ходе. Приложенное напряжение U1 уравновешивается наведенной ЭДС Е1 (Е1 ≈ U1). Обычно I0р>>I0а поэтому угол ф0 близок к π/2 cosφ0 при Х.Х. имеет малое значение и ток холостого тока является в основном реактивным током. Потери Р0 и I0 являются важными характеристиками трансформатора. Снижение этих величин уменьшает потери энергии и потребление реактивного тока. Это достигается путем применения электротехнической стали с уменьшенными магнитными свойствами - низкими удельными потерями и низкой удельной намагничивающей мощностью. Потери мощности XX трансформатора составляют 0,1...2% от номинальной мощности. Ток XX составляет 0,5... 10% от номинального тока. Большие числа относятся к трансформаторам малой мощности. Опыт холостого хода проводят для экспериментального определения потерь холостого хода Р0, тока холостого хода I0, cosφ0 и коэффициента трансформации. I0 = f (U1), P0= f (U1), cos φ0 = f (U1) эти зависимости называются характеристиками холостого хода. Характеристики Х.Х. - это зависимость cos φ0, I0, P0=f (U1). Опыт короткого замыкания. Вторая обмотка замыкается накоротко, к первичной подводится напряжение, при котором токи равны номинальным. Короткое замыкание при номинальном первичном напряжении является аварийным режимом, при котором токи в обмотках в несколько десятков раз превышают номинальные и опасны для работы трансформаторов. В опыте К.З. к трансформатору подводится пониженное напряжение U1, которое выбирается так, чтобы токи в обмотках были равны, или близки к номинальным, (обычно 3-15% от номинальногоU1н). Опыт К.З. имеет важное практическое значение К.З., и некоторые параметры схемы замещения. (Обычно оно составляет 3... 15% от U1н). При пониженном напряжении поток Ф мал, поэтому I12 ≈ 0. Уравнение трансформатора при КЗ:
Из уравнения (10.3) следует, что при К.З. токи в обмотках приведенного трансформатора равны по значению и противоположныпо направлению Из уравнения (10.2) определим ЭДС (
Подставим (10.4) в (10.1), получим
где Так как
Рисунок 10.1 - Схема замещения трансформатора при К.З. (из уравнения (10.5))
где U1ка- напряжение К.З. Рисунок 10.2 - Векторная диаграмма
Нормированное значение Uк, при котором I1 = I1ном и I2 = I2ном выражается в процентах:
Uк имеет активную и реактивную составляющую: Реактивная составляющая Uкp = U1 ∙ sin φ1к (10.8) Обычно Uк = 4... 15% (для силовых трансформаторов) В опытах К.З. из сети потребляется энергия, которая идет на покрытие внутренних потерь в трансформаторе (в обмотках и добавочные потери, которые составляют 0, 05... 0,15 от общих потерь). Потери, возникающие в трансформаторе при таком режиме, называются потерями короткого замыкания, практическое значение имеют эти потери при номинальных токах в обмотках. Добавочные потери обусловлены ~ магнитными полями рассеяния - и зависят от размеров проводников, их формы, устройства обмотки, для их уменьшения применяют транспозицию проводников. Потоки рассеяния частично замыкаются 2/3 стенки бака и другие стальные детали и индуцируют в них вихревые токи - которые вызывают конструктивные потери и так же относятся к потерям К.З. Главную часть К.З. составляют основные потери в обмотках, добавочные потери включают в основные потери в обмотках, добавочные потери включают в основные путем увеличения сопротивлений обмоток. Эквивалентные активные сопротивления первичной r1 и вторичной r2 обмоток обычно в 1,05 - 1,15 раза больше, чем сопротивление тех же обмоток при постоянном токе. Г.О. потери короткого замыкания при номинальных токах в обмотках:
Магнитные потери малы и ими пренебрегают
Вопрос 3 КПД трансформаторов. KПД трансформатора называется отношение активной мощности вторичной обмотки к активной мощности первичной обмотки. У силовых трансформаторов небольшой мощности КПД ~ 0,95, а у трансформаторов большой мощности (несколько Мегаволь-ампер) доходит до 0,995. KПД трансформаторов находится по формуле:
где ΣP - сумма потерь в трансформаторе: а) магнитные потери, вызванные прохождением потока 2/3 сердечник; б) электрические потери, возникающие при протекании тока по обмоткам. Так как Ф=соnst, при U1 = const и изменении нагрузки от холостого хода до номинальной, то магнитные потери в этом диапазоне постоянны и равны потерям Х.Х.Р. Электрические потери (основные, добавочные) пропорциональны I2. Их выражают 2/3 потери К.З. полученные при номинальном токе:
U2 ≈ U2ном= const, поэтому
где Sном = m 2 ∙ U2ном ∙ I2ном - номинальная мощность трансформатора т - число фаз. из (12.1) и (12.2) следует:
Максимум КПД можно определить:
Определение КПД при максимальной нагрузке β т:
У современных масляных трансформаторов в отношение Вопрос 4 АД при неподвижном роторе. Рассмотрим АД с обмотками на статоре и роторе. Ротор заторможен (S=1). Подключаем обмотку статора к трёхфазной питающей сети, к обмотке ротора подключаем сопротивление
При работе АД с заторможенным ротором в нём протекают процессы, как в трансформаторе. Электродвижущая сила, индуцируемая в обмотках статора и ротора:
Отношение ЭДС
где В коэффициент трансформации для АД входят обмоточные коэффициенты
АД при неподвижном роторе можно включитьпо схеме автотрансформатора. При этом он называется индукционным регулятором, в котором при
Векторная диаграмма для одной из фаз имеет вид. При повороте ротора с помощью червячной передачи угол
и тогда, постепенно поворачивая ротор, вторичноенапряжение можно изменять в пределах от 0 до
Рисунок 10.3
Характеристики К.З. Зависимость I1к = f(U1к) линейная, а соsφ1к = const
Опыт короткого замыкания проводят по схемам а) Однофазный
б) трех фазный
Рисунок 10.4 - Схемы короткого замыкания
Напряжение подводимое к первичной обмотке, плавно повышают от нуля до значения, при котором токи в обмотках будут равны номинальным и записывают показания их приборов. Для того чтобы в процессе опыта не менялось сопротивление гк, опыт проводят быстро, так как чтобы нагревание обмоток было незначительным, кроме того опыт следует проводить на длительно не работающем трансформаторе, в этом случае можно считать температуру обмоток равную температуре окружающей среды. По данным измерениям строят зависимости I1к = f(U1к), Р1к= f(U1к) и cosφ1к = f(U1к) -характеристики К.З. Для трехфазных трансформаторов зависимости строятся для средних фаз значения тока и напряжения.
Вопрос 5 ЭДС обмотки якоря машин постоянного тока. При вращении якоря в магнитном поле полюсов в проводниках обмотки якоря будет наводиться ЭДС. Распределение индукции магнитного поля в воздушном зазоре показано на рисунке (при холостом ходе, когда ток якоря равен нулю). ЭДС, наводимая в проводниках
где ЭДС Е между щетками противоположной полярности машины равна ЭДС одной параллельной ветви. В параллельную ветвь входят №12а проводников, где n – общее число активных проводников, 2а – число параллельных ветвей. Когда обмотка имеет шаг y1=
Е=
Среднее значение индукции находится из равенства потоков, которые пропорциональны площадям фигур, ограниченных кривой 1 и прямой 2. Тогда можно записать
Е=
Окружная скорость равна
υа=
Магнитный поток полюса
Ф=Вср
Тогда
Е=
Здесь Da – внешний диаметр якоря;
Сl=– Можно записать
Е=с
где с=
Поток Ф– это поток, который сцеплен с секцией при её симметричном расположении относительно полюса. При укороченном шаге y1< Скоростная характеристика. Зависимость n=f (Ia) при Uн=const и Iв=const Из уравнения ЭДС для электродвигателя
имеем
Как видно из выражения,частота вращения двигателя зависит от двух факторов — изменения тока нагрузки и потока. При увеличении тока нагрузки падение напряжения в сопротивлении цепи якоря увеличивается, а частота вращения двигателя уменьшается. Поперечная реакция якоря размагничивает двигатель, т.е. с ростом тока Ia уменьшается поток и, следовательно, увеличиваются обороты двигателя. Таким образом, оба фактора действуют в отношении оборотов машины встречно и вид скоростной характеристики будет определяется их результирующим действием. На рис. 2 показаны три разные скоростные характеристики двигателя (кривые 1,2,3). Кривая 1 — скоростная характеристика при преобладании влияния Ia∑r,кривая 2 — оба фактора приблизительно уравновешиваются, кривая 3 — преобладает фактор размагничивающего действия реакции якоря.
Рис. 2 — Характеристики двигателя параллельного возбуждения Ввиду того, что в реальных двигателях изменение потока Ф незначительно, скоростная характеристика является практически прямой линией. На ряде современных машин параллельного возбуждения для компенсации влияния поперечной реакции якоря устанавливается дополнительная стабилизирующая обмотка возбуждения, которая полностью или частично компенсирует влияние реакции якоря. Нормальной формой скоростной характеристики, при которой обеспечивается устойчивая работа двигателя, является характеристика вида кривой 1. Наклон характеристики определяется величиной сопротивления цепи якоря Σr без учета реакции якоря. Когда добавочных сопротивлений в цепь якоря не включено, характеристика называется естественной. Естественная характеристика двигателя параллельного возбуждения достаточно жесткая. Обычно, где no — частота вращения при холостом ходе. При включении в цепь якоря добавочных сопротивлений Rрг, наклон характеристик увеличивается, они становятся «мягкими» и называются искусственными или реостатными. Моментная характеристика – это зависимость М=f (Ia) при rв=const, U=Uн и Σr=const. В установившемся режиме работы двигателя согласно
имеем Mэм = M2+M0 = смIaФ. Если бы в процессе работы машины поток Ф не изменялся, то моментная характеристика представляла бы собой прямую (характеристика 4, рисунок 2). В действительности поток Ф с ростом тока Ia несколько уменьшается из-за размагничивающего действия реакции якоря, поэтому моментная характеристика слегка наклонена вниз (кривая 5). Характеристика полезного момента располагается ниже кривой электромагнитного момента на величину момента холостого хода (кривая 6). Характеристика КПД η=f (Ia) снимается при U=Uн, rв=const, Σr=const и имеет типичный для электродвигателей вид (характеристика 7 на рис. 2). КПД быстро растет при увеличении нагрузки от холостого хода до 0,25Рн, достигает максимального значения при Р=(0,5...0,75) Рн, а затем до Р=Рн остается почти неизменным. Обычно в двигателях малой мощности η=0,75...0,85, а в двигателях средней и большой мощности η=0,85...0,94. Механическая характеристика представляет зависимость n=f (M) при U=Uн, Iв=const и Σr=const. Аналитическое выражение для механической характеристики можно получить из уравнения ЭДС электродвигателя
Определив ток Iа из выражения М = сеIaФ и подставив это значение тока в выражение выше, получим
Если пренебречь реакцией якоря и считать, что поток Ф не изменяется, то механические характеристики электродвигателя параллельного возбуждения можно представить в виде прямых (рис. 3), наклон которых зависит от величины сопротивления Rрг включенного в цепь якоря. При Rрг=0 характеристика называется естественной.
Рис. 3 — Механические характеристики двигателя параллельного возбуждения Следует помнить, что при обрыве цепи возбуждения Iв=0 обороты двигателя n→∞, т.е. двигатель идет «вразнос», поэтому его необходимо немедленно отключить от сети.
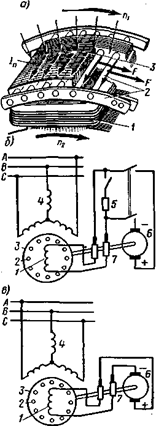
ПУСК СИНХРОННОГО ДВИГАТЕЛЯ Метод асинхронного пуска. Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т. е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, так как его ротор, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. В настоящее время для этой цели применяют метод асинхронного пуска. При этом методе синхронный двигатель пускают как асинхронный, для чего его снабжают специальной коротко-замкнутой пусковой обмоткой, выполненной по типу «беличья клетка». Чтобы увеличить сопротивление стержней, клетку изготовляют из латуни. При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле, которое, взаимодействуя с током I пв пусковой обмотке (рис. 6.48, а), создает электромагнитные силы F и увлекает за собой ротор. После разгона ротора до частоты вращения, близкой к синхронной, постоянный ток, проходящий по обмотке возбуждения, создает синхронизирующий момент, который втягивает ротор в синхронизм. Применяют две основные схемы пуска синхронного двигателя. При схеме, изображенной на рис. 6.48, б,обмотку возбуждения сначала замыкают на гасящий резистор, сопротивление которого R до б превышает в 8 — 12 раз активное сопротивление R в обмотки возбуждения. После разгона ротора до частоты вращения, близкой к синхронной (при s ≈ 0,05), обмотку возбуждения отключают от гасящего резистора и подключают к источнику постоянного тока (возбудителю), вследствие чего ротор втягивается в синхронизм. Осуществить пуск двигателя с разомкнутой обмоткой возбуждения нельзя, так как во время разгона ротора при s > 0 в ней вращающимся магнитным полем индуцируется ЭДС Е в = 4,44 f 2 w вФ m = 4,4 f 1 sw вФ m , где f 2 = f 1 s — частота изменения тока в обмотке возбуждения; w в — число витков обмотки возбуждения; Ф m — амплитуда магнитного потока вращающегося поля.
В начальный момент пуска при s = 1 из-за большого числа витков обмотки возбуждения ЭДС Е в может достигать весьма большого значения и вызвать пробой изоляции. При схеме, изображенной на рис. 6.48, в, обмотка возбуждения постоянно подключена к возбудителю, сопротивление которого по сравнению с сопротивлением R в весьма мало, поэтому эту обмотку в режиме асинхронного пуска можно считать замкнутой накоротко. С уменьшением скольжения до Одноосный эффект. Для анализа этого явления предположим сначала, что в двигателе отсутствует пусковая обмотка, а обмотка возбуждения замкнута накоротко. В результате при асинхронном пуске двигателя в обмотке возбуждения индуцируется ЭДС с частотой f 2 = f 1 s и по обмотке проходит переменный ток, создающий пульсирующее магнитное поле (обмотка возбуждения в этом случае является однофазной обмоткой переменного тока). Пульсирующее магнитное поле можно разложить на две составляющие: прямое и обратное вращающиеся магнитные поля ротора, которые характеризуются потоками Фпр и Фобр. Частота вращения каждого из этих полей относительно ротора (6.46) n р.пр = n 2 + n p = n 1 (1 - s) + n 1 s = n 1, где n 2 = n 1 (1 - s) — частота вращения ротора. Следовательно, оно вращается синхронно с полем статора; образуемый этим полем с током статора электромагнитный момент М пр изменяется в зависимости от скольжения так же, как и в трехфазном асинхронном двигателе (рис. 6.49, кривая 2). Обратное поле ротора вращается относительно статора с частотой (6.47) п р.обр = n 2 - n 1 = n 1 (1 - s) - n 1 s = n 1 (1 - 2s). При частотах вращения ротора n 2 < 0,5n 1, т. е. при s > 0,5, обратное поле, как видно из формулы (6.47), перемещается относительно статора в сторону, противоположную направлению вращения ротора; при n 2 = 0,5n 1, это поле неподвижно относительно статора; при n 2 > 0,5 (т. е. при s < 0,5) оно перемещается в ту же сторону, что и ротор.
В обмотке статора обратным полем индуцируется ЭДС с частотой f 1 (1 — 2s), для которой обмотка статора является короткозамкнутой. При этом по обмотке статора проходит соответствующий ток. Взаимодействуя с обратным полем ротора, этот ток создает электромагнитный момент М о6р. Так как направление момента зависит от направления вращения поля n р.обр относительно статора, то из формулы (6.47) следует, что он является знакопеременным и изменение его направления происходит при s = 0,5 (рис. 6.49, кривая 3). Таким образом, ток, индуцируемый в обмотке возбуждения при пуске двигателя, создает электромагнитный момент, который при частоте вращения, меньшей 0,5 n 1, является ускоряющим, а при большей частоте вращения — тормозящим. Особенно резко проявляется действие обратного поля при n ≈ 0,5 n 1. Наличие пусковой обмотки на роторе существенно уменьшает обратное магнитное поле и создаваемый им момент. Однако этот момент, складываясь с асинхронным моментом пусковой обмотки (кривая 1), создает в кривой результирующего пускового момента провал при частоте вращения, равной половине синхронной (кривая 4).Этот провал тем больше, чем больше ток в обмотке возбуждения. Очевидно, что включение гасящего сопротивления в цепь обмотки возбуждения (см. рис. 6.48, б) на период пуска уменьшает ток в этой обмотке и улучшает форму кривой пускового момента.
Вопрос 8 Механическая характеристика АД. График соответствующий уравнению:
имеет следующий вид
На графике можно выделить три возможных режима работы:генера-торный Нормальная работа двигателя обычно протекает на линейном участке. Здесь находится точка номинального режима работы. Номинальный момент Момент при скольжении S=1 называется пусковым Механическую характеристику можно представить в виде зависимости
Подставив
Вопрос 9 Максимальный момент соответствует критическому скольжению Момент при скольжении S=1 называется пусковым Механическую характеристику можно представить в виде зависимости
Подставив
11Современные способы регулирования частоты вращения электродвигателей постоянного тока Принципы регулирования частоты вращения в двигательном режиме, реализуются в четырех основных способах регулирования: 1) реостатно-контакторное регулирование; 2) регулирование по системе «генератор — двигатель»; 3) регулирование по системе «управляемый выпрямитель — двигатель»; 4) импульсное регулирование. Подробно эти способы регулирования исследуются в курсах электропривода и теории автоматического регулирования. Здесь же будут рассмотрены только основные положения, имеющие непосредственное отношение к теории электрических машин. Реостатно-контакторное регулирование. В настоящее время это управление широко применяется для регулирования частоты вращения двигателей малой и средней мощности, а иногда (на железнодорожном транспорте) и для мощных двигателей. Обычно при реостатно-контакторном управлении используются два метода регулирования: 1) при частотах вращения, меньших номинальной, в цепь якоря включают дополнительные сопротивления Рис. 7 28. Схема реостатно-контактивления; 2) при повышенных торного регулирования частоты вра-частотах вращения регулируют с последовательным ток возбуждения. Машины малой мощности при отсутствии автоматизированного управления имеют два ползунковых регулировочных реостата, один из которых включен в цепь якоря, а другой — в цепь возбуждения. При больших мощностях, а также при необходимости автоматизации процесса сопротивления изменяют ступенчато (рис. 7.28) с помощью контакторов. Если требуется точное регулирование, то контакторов должно быть очень много, вся установка становится громоздкой, дорогой и сравнительно малонадежной. Реостатно-контакторная система при двигателях с параллельным возбуждением позволяет в зоне высоких частот вращения осуществлять рекуперативное торможение путем увеличения тока возбуждения. В зоне низких частот вращения применяют реостатное торможение, причем регулирование тормозного усилия осуществляют с помощью той же реостатно-контакторной установки, которая регулирует двигательный режим, после соответствующего переключения схемы. В связи со сложностью автоматизации и большими расходами на ремонт и эксплуатацию реостатно-контакторное управление в настоящее время постепенно заменяют более совершенными системами управления. Регулирование по системе «генератор — двигатель». В этой установке (рис. 7.29) двигатель Д получает питание от автономного генератора Г с независимым возбуждением, который приводится во вращение каким-либо первичным двигателем ПД (например, электродвигателем, дизелем) Регулирование частоты вращения осуществляют изменением: 1) напряжения на якоре двигателя путем изменения тока возбуждения генератора /вГ;
Рис. 7 28. Схема реостатно-контакторного регулирования частоты вращения двигателя с последовательным возбуждением 2) магнитного потока двигателя путем регулирования тока возбуждения двигателя /в.д. Пуск в ход и получение низких частот вращения производят при максимальном токе возбуждения двига1еля, но при уменьшенном токе возбуждения генератора, т. е. при пониженном напряжении. Ослабление магнитного потока двигателя (уменьшение его тока возбуждения) производят только после того, как исчерпана возможность повышения напряжения, т. е. когда установлен максимальный ток возбуждения генератора. Изменение направления вращения двигателя производят переменой полярности подводимого к якорю напряжения, для чего меняют направление тока в обмотке возбуждения генератора. Система «генератор — двигатель» выгодно отличается тем, что в ней отсутствуют силовые контакторы, реостаты и т. п. Управление легко поддается автоматизации, так как осуществляется путем регулирования сравнительно небольших токов возбуждения. Установки типа «генератор — двигатель» широко распространены в промышленности и на транспорте, в тех устройствах, где требуется регулирование частоты вращения в широких пределах. В транспортных установках генератор приводится во вращение дизелем, в промышленности — трехфазным синхронным или асинхронным двигателем. Систему «генератор — двигатель» широко применяют в металлургической промышленности для привода прокатных станов с двигателями мощностью 10 МВт и более при диапазоне регулирования частоты вращения 1: 200 и точности поддержания заданной частоты вращения (погрешности) менее 1%. В рассматриваемой системе уменьшение частоты вращения производят с использованием рекуперативного торможения: сначала увеличивая ток возбуждения двигателя, а затем постепенно уменьшая ток возбуждения генератора, можно перевести двигатель в генераторный режим и быстро затормозить механизм. При этом накопленная кинетическая энергия якоря и механизма отдается в электрическую сеть. Если нагрузка толчкообразная, то иногда на валу первичного двигателя, вращающего генератор, ставят маховик, который уменьшает перегрузки первичного двигателя. Недостатки системы «генератор — двигатель» — большие масса, габариты, высокая стоимость установки; сравнительно низкий КПД (примерно 0,6...0,7), так как производится трехкратное преобразование энергии. Рис. 7.29. Схема «генератор—двигатель»
В последнее время на транспорте (в тепловозах, больших автомобилях, кораблях) вместо генератора постоянного тока в системе «генератор — двигатель» применяют синхронный генератор с полупроводниковым выпрямителем. Это позволяет снизить массу и уменьшить стоимость генератора. В промышленных установках такое усовершенство
|
||||||||
|
|
Последнее изменение этой страницы: 2016-07-16; просмотров: 1514; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.128.200.165 (0.014 с.) |


 = 0
= 0



 - сопротивление К.З.
- сопротивление К.З. , то из сопоставления (10.5) и (10.4) следует, что при К.З. в первичной обмотке трансформатора наводится ЭДС Е1к ≈ 0,5 U1к
, то из сопоставления (10.5) и (10.4) следует, что при К.З. в первичной обмотке трансформатора наводится ЭДС Е1к ≈ 0,5 U1к 









 , что дает β т = 0,4 ÷ 0,5. Характерной особенностью зависимости η = f(β), является малое изменение их КПД при значительных колебаниях нагрузки в зоне β> β т. На КПД трансформатора оказывает влияние характер нагрузки. С увеличением cosφ2, КПД возрастает, так как возрастает полезная активная мощность.
, что дает β т = 0,4 ÷ 0,5. Характерной особенностью зависимости η = f(β), является малое изменение их КПД при значительных колебаниях нагрузки в зоне β> β т. На КПД трансформатора оказывает влияние характер нагрузки. С увеличением cosφ2, КПД возрастает, так как возрастает полезная активная мощность. нагрузки. Тогда АД будет работать как трансформатор. Энергия, потребляемая обмоткой статора из сети напряжением
нагрузки. Тогда АД будет работать как трансформатор. Энергия, потребляемая обмоткой статора из сети напряжением  передаётся электромагнитным путём во вторичную цепь при напряжении
передаётся электромагнитным путём во вторичную цепь при напряжении  . Частоты в первичной и вторичной обмотках будут одинаковыми и равными:
. Частоты в первичной и вторичной обмотках будут одинаковыми и равными: .
.

 .
. ,
, коэффициент трансформации.
коэффициент трансформации. и
и  , которые учитывают пространственное расположение обмоток. Относительное смещение осей обмоток статора и ротора вызывают сдвиг по фазе ЭДС, индуцируемый в обмотках вращающимся полем статора. Если ротор повернуть на угол
, которые учитывают пространственное расположение обмоток. Относительное смещение осей обмоток статора и ротора вызывают сдвиг по фазе ЭДС, индуцируемый в обмотках вращающимся полем статора. Если ротор повернуть на угол  в сторону вращения магнитного поля, то магнитное поле при своём вращении будет набегать сначала на фазу
в сторону вращения магнитного поля, то магнитное поле при своём вращении будет набегать сначала на фазу  статора, а затем на фазу
статора, а затем на фазу  ротора. Вследствие этого ЭДС фазы
ротора. Вследствие этого ЭДС фазы  .
. const можно получить плавное регулирование вторичного напряжения. Напряжение
const можно получить плавное регулирование вторичного напряжения. Напряжение  будет геометрическиприбавляться ЭДС
будет геометрическиприбавляться ЭДС  , индуцируемая вращающимся полем в фазах вторичной обмотки, т.е
, индуцируемая вращающимся полем в фазах вторичной обмотки, т.е .
.

 изменяется и конец вектора
изменяется и конец вектора  перемещается по окружности радиусом
перемещается по окружности радиусом  ,
, . При этом будет изменяться угол сдвига между напряжениями
. При этом будет изменяться угол сдвига между напряжениями  . Включая обе обмотки последовательно или параллельно, АМпри неподвижном роторе можно использовать также в качестве регулируемого активного сопротивления.
. Включая обе обмотки последовательно или параллельно, АМпри неподвижном роторе можно использовать также в качестве регулируемого активного сопротивления.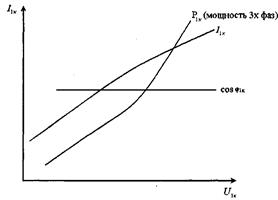



 Сх=
Сх=  υа,
υа, – индукция в данной точки полюсного деления.
– индукция в данной точки полюсного деления. , тогда
, тогда υа
υа  .
. υа
υа 
 .
. .
. или Е=Сl∙n∙Ф.
или Е=Сl∙n∙Ф. – полюсное деление;
– полюсное деление; – конструктивная постоянная машины.
– конструктивная постоянная машины. ,
, ;
; .
. и поток, сцепленный с секцией, уменьшается, в соответствии с чем уменьшается и ЭДС Е. Однако при реально применяемом укорочении шага в обмотках МПТ уменьшение ЭДС незначительное. Поэтому для её определения используются приведенные выше формулы.
и поток, сцепленный с секцией, уменьшается, в соответствии с чем уменьшается и ЭДС Е. Однако при реально применяемом укорочении шага в обмотках МПТ уменьшение ЭДС незначительное. Поэтому для её определения используются приведенные выше формулы.







 , (1)
, (1) .
.
 ; двигательный
; двигательный  и тормозной
и тормозной  .
. соответствует номинальному скольжению
соответствует номинальному скольжению  Максимальный момент соответствует критическому скольжению
Максимальный момент соответствует критическому скольжению  Кратность максимального момента кноминальному
Кратность максимального момента кноминальному  . Более высокие значения
. Более высокие значения  соответствуют АД с меньшим числом полюсов.
соответствуют АД с меньшим числом полюсов. . Кратность пускового момента к номинальному
. Кратность пускового момента к номинальному 
 . Для этого в уравнении (1)
. Для этого в уравнении (1)  заменяется на
заменяется на  . Для получения выражения для
. Для получения выражения для  необходимо уравнение (1) продифференцировать по S и приравнять нулю, то есть
необходимо уравнение (1) продифференцировать по S и приравнять нулю, то есть  . В результате получим:
. В результате получим: . (2)
. (2) в (1), получим:
в (1), получим: . (3)
. (3)




