Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
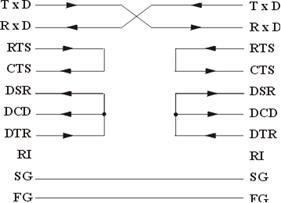
Рис.1.1 Схема 4-проводной линии связи для RS-232CСодержание книги
Поиск на нашем сайте
Состояние СТАРТ и СТОП
Процедура обмена начинается с того, что ведущий формирует состояние СТАРТ: генерирует переход сигнала линии SDA из ВЫСОКОГО состояния в НИЗКОЕ при ВЫСОКОМ уровне на линии SCL. Этот переход воспринимается всеми устройствами, подключенными к шине, как признак начала процедуры обмена. Генерация синхросигнала — это всегда обязанность ведущего; каждый ведущий генерирует свой собственный сигнал синхронизации при пересылке данных по шине. Процедура обмена завершается тем, что ведущий формирует состояние СТОП — переход состояния линии SDA из низкого состояния в ВЫСОКОЕ при ВЫСОКОМ состоянии линии SCL. Состояния СТАРТ и СТОП всегда вырабатываются ведущим. Считается, что шина занята после фиксации состояния СТАРТ. Шина считается освободившейся через некоторое время после фиксации состояния СТОП. При передаче посылок по шине I2C каждый ведущий генерирует свой синхросигнал на линии SCL. После формирования состояния СТАРТ, ведущий опускает состояние линии SCL в НИЗКОЕ состояние и выставляет на линию SDA старший бит первого байта сообщения. Количество байт в сообщении не ограничено. Спецификация шины I2C разрешает изменения на линии SDA только при НИЗКОМ уровне сигнала на линии SCL. Данные действительны и должны оставаться стабильными только во время ВЫСОКОГО состояния синхроимпульса. Для подтверждения приема байта от ведущего-передатчика ведомым-приемником в спецификации протокола обмена по шине I2C вводится специальный бит подтверждения, выставляемый на шину SDA после приема 8 бита данных.
Подтверждение
Таким образом передача 8 бит данных от передатчика к приемнику завершаются дополнительным циклом (формированием 9-го тактового импульса линии SCL), при котором приемник выставляет низкий уровень сигнала на линии SDA, как признак успешного приема байта.
Подтверждение при передаче данных обязательно, кроме случаев окончания передачи, ведомой стороной. Соответствующий импульс синхронизации генерируется ведущим. Передатчик отпускает (ВЫСОКОЕ) линию SDA на время синхроимпульса подтверждения. Приёмник должен удерживать линию SDA в течение ВЫСОКОГО состояния синхроимпульса подтверждения в стабильном НИЗКОМ состоянии.
В том случае, когда ведомый-приёмник не может подтвердить свой адрес (например, когда он выполняет в данный момент какие-либо функции реального времени), линия данных должна быть оставлена в ВЫСОКОМ состоянии. После этого ведущий может выдать сигнал СТОП для прерывания пересылки данных. Если в пересылке участвует ведущий-приёмник, то он должен сообщить об окончании передачи ведомому-передатчику путем не подтверждения последнего байта. Ведомый-передатчик должен освободить линию данных для того, чтобы позволить ведущему выдать сигнал СТОП или повторить сигнал СТАРТ.
Синхронизация выполняется с использованием подключения к линии SCL по правилу монтажного И. Это означает, что ведущий не имеет монопольного права на управление переходом линии SCL из НИЗКОГО состояния в ВЫСОКОЕ. В том случае, когда ведомому необходимо дополнительное время на обработку принятого бита, он имеет возможность удерживать линию SCL в низком состоянии до момента готовности к приему следующего бита. Таким образом, линия SCL будет находиться в НИЗКОМ состоянии на протяжении самого длинного НИЗКОГО периода синхросигналов.
Устройства с более коротким НИЗКИМ периодом будут входить в состояние ожидания на время, пока не кончится длинный период. Когда у всех задействованных устройств кончится НИЗКИЙ период синхросигнала, линия SCL перейдет в ВЫСОКОЕ состояние. Все устройства начнут проходить ВЫСОКИЙ период своих синхросигналов. Первое устройство, у которого кончится этот период, снова установит линию SCL в НИЗКОЕ состояние. Таким образом, НИЗКИЙ период синхролинии SCL определяется наидлиннейшим периодом синхронизации из всех задействованных устройств, а ВЫСОКИЙ период определяется самым коротким периодом синхронизации устройств.
Механизм синхронизации может быть использован приемниками как средство управления пересылкой данных на байтовом и битовом уровнях.
На уровне байта, если устройство может принимать байты данных с большой скоростью, но требует определенное время для сохранения принятого байта или подготовки к приему следующего, то оно может удерживать линию SCL в НИЗКОМ состоянии после приема и подтверждения байта, переводя, таким образом, передатчик в состояние ожидания.
На уровне битов, устройство, такое как микроконтроллер, без встроенных аппаратных цепей I2C или с ограниченными цепями, может замедлить частоту синхроимпульсов путем продления их НИЗКОГО периода. Таким образом, скорость передачи любого ведущего адаптируется к скорости медленного устройства.
Адресация в шине I2C
Каждое устройство, подключённое к шине, может быть программно адресовано по уникальному адресу. Для выбора приемника сообщения ведущий использует уникальную адресную компоненту в формате посылки. При использовании однотипных устройств, ИС часто имеют дополнительный селектор адреса, который может быть реализован как в виде дополнительных цифровых входов селектора адреса, так и в виде аналогового входа. При этом адреса таких однотипных устройств оказываются, разнесены в адресном пространстве устройств, подключенных к шине.
В обычном режиме используется 7-битная адресация.
Процедура адресации на шине I2C заключается в том, что первый байт после сигнала СТАРТ определяет, какой ведомый адресуется ведущим для проведения цикла обмена. Исключение составляет адрес «Общего вызова», который адресует все устройства на шине. Когда используется этот адрес, все устройства в теории должны послать сигнал подтверждения. Однако, устройства, которые могут обрабатывать «общий вызов», на практике встречаются редко.
Первые семь битов первого байта образуют адрес ведомого. Восьмой, младший бит, определяет направление пересылки данных. «Ноль» означает, что ведущий будет записывать информацию в выбранного ведомого. «Единица» означает, что ведущий будет считывать информацию из ведомого.
После того, как адрес послан, каждое устройство в системе сравнивает первые семь бит после сигнала СТАРТ со своим адресом. При совпадении устройство полагает себя выбранным как ведомый-приёмник или как ведомый-передатчик, в зависимости от бита направления.
Адрес ведомого может состоять из фиксированной и программируемой части. Часто случается, что в системе будет несколько однотипных устройств (к примеру, ИМС памяти, или драйверов светодиодных индикаторов), поэтому при помощи программируемой части адреса становится возможным подключить к шине максимально возможное количество таких устройств. Количество программируемых бит в адресе зависит от количества свободных выводов микросхемы. Иногда используется один вывод с аналоговой установкой программируемого диапазона адресов[1]. При этом в зависимости от потенциала на этом адресном выводе ИМС, возможно смещение адресного пространства драйвера так, чтобы однотипные ИМС не конфликтовали между собой на общей шине.
Все специализированные ИМС, поддерживающие работу в стандарте шины I2C, имеют набор фиксированных адресов, перечень которых указан производителем в описаниях контроллеров.
Комбинация бит 11110ХХ адреса зарезервирована для 10-битной адресации.
Как следует из спецификации шины, допускаются как простые форматы обмена, так и комбинированные, когда в промежутке от состояния СТАРТ до состояния СТОП ведущий и ведомый могут выступать и как приемник, и как передатчик данных. Комбинированные форматы могут быть использованы, например, для управления последовательной памятью.
Во время первого байта данных можно передавать адрес в памяти, который записывается во внутренний регистр-защелку. После повторения сигнала СТАРТа и адреса ведомого выдаются данные из памяти. Все решения об авто-инкременте или декременте адреса, к которому произошел предыдущий доступ, принимаются конструктором конкретного устройства. Поэтому, в любом случае лучший способ избежать неконтролируемой ситуации на шине перед использованием новой (или ранее не используемой) ИМС следует тщательно изучить ее описание (datasheet или reference manual), получив его с сайта производителя. Более того, производители часто размещают рядом более подробные инструкции по применению.
В любом случае, по спецификации шины все разрабатываемые устройства должны сбрасывать логику шины при получении сигнала СТАРТ или повторный СТАРТ и подготавливаться к приему адреса.
Тем не менее основные проблемы с использованием I2C шины возникают именно из-за того, что разработчики, «начинающие» работать с I2C шиной не учитывают того факта, что ведущий (часто — микропроцессор) не имеет монопольного права ни на одну из линий шины.
Преимущества
· необходим всего один микроконтроллер для управления набором устройств; · используется всего две линии ввода-вывода общего назначения; · стандарт предусматривает «горячее» подключение и отключение устройств в процессе работы системы · встроенный в микросхемы фильтр подавляет всплески, обеспечивая целостность данных.
Преимущества для конструкторов
· поскольку такие микросхемы подключаются непосредственно к шине без каких-либо дополнительных цепей, появляется возможность модификации и модернизации системы прототипа путем подключения и отключения устройств от шины. · блоки на функциональной схеме соответствуют микросхемам, переход от функциональной схемы к принципиальной происходит быстро. · нет нужды разрабатывать шинные интерфейсы, так как шина уже интегрирована в микросхемы. · интегрированные адресация устройств и протокол передачи данных позволяют системе быть полностью программно определяемой. · одни и те же типы микросхем могут быть часто использованы в разных приложениях. · время разработки снижается, так как конструкторы быстро знакомятся с часто используемыми функциональными блоками и соответствующими микросхемами. · микросхемы могут быть добавлены или убраны из системы без оказания влияния на другие микросхемы, подключенные к шине (если их работа независима). · простая диагностика сбоев и отладка; нарушения в работе могут быть немедленно отслежены.
· время разработки программного обеспечения может быть снижено за счет использования библиотеки повторно используемых программных модулей.
Последовательный интерфейс SPI
Введение
SPI - популярный интерфейс для последовательного обмена данными между микросхемами. Интерфейс SPI, наряду с I2C, относится к самым широко-используемым интерфейсам для соединения микросхем. Изначально он был придуман компанией Motorola, а в настоящее время используется в продукции многих производителей. Его наименование является аббревиатурой от 'Serial Peripheral Bus', что отражает его предназначение - шина для подключения внешних устройств. Шина SPI организована по принципу 'ведущий-подчиненный'. В качестве ведущего шины обычно выступает микроконтроллер, но им также может быть программируемая логика, DSP-контроллер или специализированная ИС. Подключенные к ведущему шины внешние устройства образуют подчиненных шины. В их роли выступают различного рода микросхемы, в т.ч. запоминающие устройства (EEPROM, Flash-память, SRAM), часы реального времени (RTC), АЦП/ЦАП, цифровые потенциометры, специализированные контроллеры и др.
Главным составным блоком интерфейса SPI является обычный сдвиговый регистр, сигналы синхронизации и ввода/вывода битового потока которого и образуют интерфейсные сигналы. Таким образом, протокол SPI правильнее назвать не протоколом передачи данных, а протоколом обмена данными между двумя сдвиговыми регистрами, каждый из которых одновременно выполняет и функцию приемника, и функцию передатчика. Непременным условием передачи данных по шине SPI является генерация сигнала синхронизации шины. Этот сигнал имеет право генерировать только ведущий шины и от этого сигнала полностью зависит работа подчиненного шины. Скорость передачи данных определяется св-ми ведущего и ведомого устройств (обычно достаточно высокая 50Мбит/сек).
Электрическое подключение
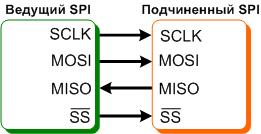
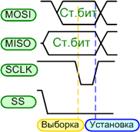
Существует три типа подключения к шине SPI, в каждом из которых участвуют четыре сигнала (их основное и альтернативные обозначения см. в табл. 1). Самое простое подключение, в котором участвуют только две микросхемы, показано на рисунке 1. Здесь, ведущий шины передает данные по линии MOSI синхронно со сгенерированным им же сигналом SCLK, а подчиненный захватывает переданные биты данных по определенным фронтам принятого сигнала синхронизации. Одновременно с этим подчиненный отправляет свою посылку данных. Представленную схему можно упростить исключением линии MISO, если используемая подчиненная ИС не предусматривает ответную передачу данных или в ней нет потребности. Одностороннюю передачу данных можно встретить у таких микросхем как ЦАП, цифровые потенциометры, программируемые усилители и драйверы. Таким образом, рассматриваемый вариант подключения подчиненной ИС требует 3 или 4 линии связи. Чтобы подчиненная ИС принимала и передавала данные, помимо наличия сигнала синхронизации, необходимо также, чтобы линия SS была переведена в низкое состояние. В противном случае, подчиненная ИС будет неактивна. Когда используется только одна внешняя ИС, может возникнуть соблазн исключения и линии SS за счет жесткой установки низкого уровня на входе выбора подчиненной микросхемы. Такое решение крайне нежелательно и может привести к сбоям или вообще невозможности передачи данных, т.к. вход выбора микросхемы служит для перевода ИС в её исходное состояние и иногда инициирует вывод первого бита данных.
Рис. 1. Простейшее подключение к шине SPI
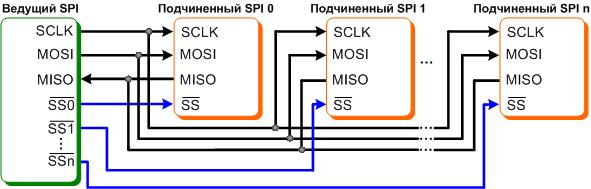
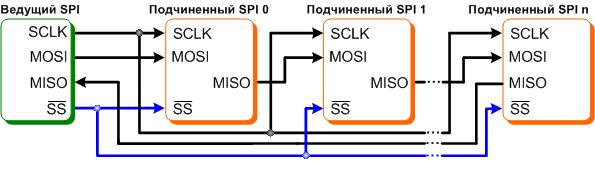
При необходимости подключения к шине SPI нескольких микросхем используется либо независимое (параллельное) подключение (рис. 2), либо каскадное (последовательное) (рис. 3). Независимое подключение более распространенное, т.к. достигается при использовании любых SPI-совместимых микросхем. Здесь, все сигналы, кроме выбора микросхем, соединены параллельно, а ведущий шины, переводом того или иного сигнала SS в низкое состояние, задает, с какой подчиненной ИС он будет обмениваться данными. Главным недостатком такого подключения является необходимость в дополнительных линиях для адресации подчиненных микросхем (общее число линий связи равно 3+n, где n-количество подчиненных микросхем). Каскадное включение избавлено от этого недостатка, т.к. здесь из нескольких микросхем образуется один большой сдвиговый регистр. Для этого выход передачи данных одной ИС соединяется со входом приема данных другой, как показано на рисунке 3. Входы выбора микросхем здесь соединены параллельно и, таким образом, общее число линий связи сохранено равным 4. Однако использование каскадного подключения возможно только в том случае, если его поддержка указана в документации на используемые микросхемы. Чтобы выяснить это, важно знать, что такое подключение по-английски называется 'daisy-chaining'.
Рис. 2. Независимое подключение к шине SPI
Рис. 3. Каскадное подключение к шине SPI
Протокол передачи
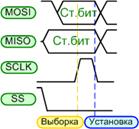
Протокол передачи по интерфейсу SPI предельно прост и, по сути, идентичен логике работы сдвигового регистра, которая заключается в выполнении операции сдвига и, соответственно, побитного ввода и вывода данных по определенным фронтам сигнала синхронизации. Установка данных при передаче и выборка при приеме всегда выполняются по противоположным фронтам синхронизации. Это необходимо для гарантирования выборки данных после надежного их установления. Если к этому учесть, что в качестве первого фронта в цикле передачи может выступать нарастающий или падающий фронт, то всего возможно четыре варианта логики работы интерфейса SPI. Эти варианты получили название режимов SPI и описываются двумя параметрами: CPOL - исходный уровень сигнала синхронизации (если CPOL=0, то линия синхронизации до начала цикла передачи и после его окончания имеет низкий уровень (т.е. первый фронт нарастающий, а последний - падающий), иначе, если CPOL=1, - высокий (т.е. первый фронт падающий, а последний - нарастающий)); CPHA - фаза синхронизации; от этого параметра зависит, в какой последовательности выполняется установка и выборка данных (если CPHA=0, то по переднему фронту в цикле синхронизации будет выполняться выборка данных, а затем, по заднему фронту, - установка данных; если же CPHA=1, то установка данных будет выполняться по переднему фронту в цикле синхронизации, а выборка - по заднему). Информация по режимам SPI обобщена в таблице 2.
Ведущая и подчиненная микросхемы, работающие в различных режимах SPI, являются несовместимыми, поэтому, перед выбором подчиненных микросхем важно уточнить, какие режимы поддерживаются ведущим шины. Аппаратные модули SPI, интегрированные в микроконтроллеры, в большинстве случаев поддерживают возможность выбора любого режима SPI и, поэтому, к ним возможно подключение любых подчиненных SPI-микросхем (относится только к независимому варианту подключения). Кроме того, протокол SPI в любом из режимов легко реализуется программно.
Cравнение с шиной I2C
Как уже упоминалось, для стыковки микросхем не меньшей популярностью пользуется 2-проводная последовательная шина I2C. Ниже можно ознакомиться с преимуществами, которая дает та или иная последовательная шина. I2C – параллельная шина, где на два провода может подключаться n-передач.
Преимущества шины SPI Преимущества шины I2C Предельная простота протокола передачи на физическом уровне обуславливает высокую надежность и быстродействие передачи. Предельное быстродействие шины SPI измеряется десятками мегагерц и, поэтому, она идеальна для потоковой передачи больших объемов данных и широко используется в высокоскоростных ЦАП/АЦП, драйверах светодиодных дисплеев и микросхемах памяти Шина I2C остается двухпроводной, независимо от количества подключенной к ней микросхем. Все линии шины SPI являются однонаправленными, что существенно упрощает решение задачи преобразования уровней и гальванической изоляции микросхем Возможность мультимастерной работы, когда к шине подключено несколько ведущих микросхем. Простота программной реализации протокола SPI. Протокол I2C является более стандартизованным, поэтому, пользователь I2C-микросхем более защищен от проблем несовместимости выбранных компонентов. Производные и совместимые протоколы · MICROWIRE. Протокол MICROWIRE компании National Semiconductor полностью идентичен протоколу SPI в режиме 0 (CPOL = 0, CPHA = 0). · 3-проводной интерфейс компании Maxim Отличие этого интерфейса состоит в том, что вместо полнодуплексной передачи по двум однонаправленным линиям здесь выполняется полудуплексная передача по одной двунаправленной линии DQ. · QSPI Более высокоуровневый протокол, чем SPI, позволяющий автоматизировать передачу данных без участия ЦПУ. Кроме того, интерфейс SPI является основой для построения ряда специализированных интерфейсов, в т.ч. отладочный интерфейс JTAG и интерфейсы карт Flash-памяти, в т.ч. SD и MMC. Одно из требований 2С – возможность неск. инициирующих устройств. Стартовый бит – служит сигналом занятости. Выходной каскад каждого устройства представляет собой схему с открытым коллектором => необходимо включить нагрузочный резистор. Логика соединения – «монтажное ИЛИ». После передачи стартового бита происходит передача адреса устройства (в SPI происходило просто по сигналу CS): 7 бит – адрес, 8й бит – бит подтверждения (если устройство передатчик, то 8 бит передает 1(рецессивное состояние) и одновременно считывает состояние того, что передается; 1- сигнал того, что необходимое устройство существует), следующие 8 бит - посылка команд устройству, след. бит – команда чтения или записи, после следует бит подтверждения, 8 бит – передача данных устройству. Ведущими устройствами , как правило, являются микроконтролллеры. Расстояние связи несколько шире, чем SPI (межплатная связь) – осуществлена связь между устройствами. Скорость: стандарт, высокая – 400 кбит/сек (кГц), ультравысокая - 2 Мбит/сек. Гальваническая изоляция сигналов –нет прямого перетекания сигналов из А в В (например, работа трансформатор) Табл. 1. Электрические сигналы шины SPI Ведущий шины Подчиненный шины Основное обозначение Альтернативное обозначение Описание Основное обозначение Альтернативное обозначение Описание MOSI DO, SDO, DOUT Выход последовательной передачи данных MOSI DI, SDI, DIN Вход последовательного приема данных MISO DI, SDI, DIN Вход последовательного приема данных MISO DO, SDO, DOUT Выход последовательной передачи данных SCLK DCLOCK, CLK, SCK Выход синхронизации передачи данных SCLK DCLOCK, CLK, SCK Вход синхронизации приема данных SS CS Выход выбора подчиненного (выбор микросхемы) SS CS Вход выбора подчиненного (выбор микросхемы) Табл. 2. Режимы SPI Режим SPI CPOL CPHA Временная диаграмма первого цикла синхронизации
Последовательный интерфейс RS-232
Широко используемый последовательный интерфейс синхронной и асинхронной передачи данных, определяемый стандартом EIA RS-232-C и рекомендациями V.24 CCITT. Изначально создавался для связи компьютера с терминалом. В настоящее время используется в самых различных применениях.
Интерфейс RS-232-C соединяет два устройства. Линия передачи первого устройства соединяется с линией приема второго и наоборот (полный дуплекс) Для управления соединенными устройствами используется программное подтверждение (введение в поток передаваемых данных соответствующих управляющих символов). Возможна организация аппаратного подтверждения путем организации дополнительных RS-232 линий для обеспечения функций определения статуса и управления.
Стандарт EIA RS-232-C, CCITT V.24 Скорость передачи 115 Кбит/с (максимум) Расстояние передачи 15 м (максимум) Характер сигнала несимметричный по напряжению Количество драйверов Количество приемников Схема соединения полный дуплекс, от точки к точке
Интерфейс RS-232C предназначен для подключения к компьютеру стандартных внешних устройств (принтера, сканера, модема, мыши и др.), а также для связи компьютеров между собой. Основными преимуществами использования RS-232C по сравнению с Centronics являются возможность передачи на значительно большие расстояния и гораздо более простой соединительный кабель. В то же время работать с ним несколько сложнее. Данные в RS-232C передаются в последовательном коде побайтно. Каждый байт обрамляется стартовым и стоповыми битами. Данные могут передаваться как в одну, так и в другую сторону (дуплексный режим).
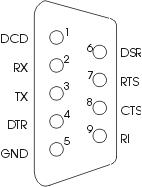
Компьютер имеет 25-контактный (DB25P) или 9-контактный (DB9P) разъем для подключения RS-232C. Назначение контактов разъема приведено в таблице.
Назначение сигналов следующее. FG - защитное заземление (экран). -TxD - данные, передаваемые компьютером в последовательном коде (логика отрицательная). -RxD - данные, принимаемые компьютером в последовательном коде (логика отрицательная). RTS - сигнал запроса передачи. Активен во все время передачи. CTS - сигнал сброса (очистки) для передачи. Активен во все время передачи. Говорит о готовности приемника. DSR - готовность данных. Используется для задания режима модема. SG - сигнальное заземление, нулевой провод. DCD - обнаружение несущей данных (детектирование принимаемого сигнала). DTR - готовность выходных данных. RI - индикатор вызова. Говорит о приеме модемом сигнала вызова по телефонной сети.
Наиболее часто используются трех- или четырехпроводная связь (для двунапрвленной передачи). Схема соединения для четырехпроводной линии связи показана на рисунке 1.1.
Для двухпроводной линии связи в случае только передачи из компьютера во внешнее устройство используются сигналы SG и TxD. Все 10 сигналов интерфейса задействуются только при соединении компьютера с модемом.
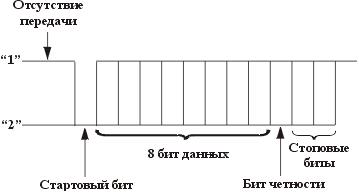
Формат передаваемых данных показан на рисунке 1.2. Собственно данные (5, 6, 7 или 8 бит) сопровождаются стартовым битом, битом четности и одним или двумя стоповыми битами. Получив стартовый бит, приемник выбирает из линии биты данных через определенные интервалы времени. Очень важно, чтобы тактовые частоты приемника и передатчика были одинаковыми, допустимое расхождение - не более 10%. Скорость передачи по RS-232C может выбираться из ряда: 110, 150, 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 бит/с.
Все сигналы RS-232C передаются специально выбранными уровнями, обеспечивающими высокую помехоустойчивость связи (рис.1.3.). Отметим, что данные передаются в инверсном коде (логической единице соответствует низкий уровень, логическому нулю - высокий уровень).
Для подключения произвольного УС к компьютеру через RS-232C обычно используют трех- или четырехпроводную линию связи (см. рис. 1.1), но можно задействовать и другие сигналы интерфейса.
|
|||||||||
|
|
Последнее изменение этой страницы: 2024-06-27; просмотров: 6; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.110.76 (0.012 с.) |