
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Обслуговування засобів мікропроцесорної техніки. Калібрування мікропроцесорного регулятора.Содержание книги
Поиск на нашем сайте
Мета роботи: вивчення методики і набуття практичних навиків в визначенні технічного стану і регулюванні мікропроцесорних регуляторів ТРМ-8 Прилади та обладнання: 1. Двухканальний мікропроцесорний регулятор ТРМ-8 -1шт. 2. Блок ручого завдання та індикації БРЗ -1шт. 3.Інструкція на прилад ТРМ-8 -1шт.
Порядок виконання роботи
1. Вивчити призначення кожного з компонентів передньої панелі. 2. Вивчити методику переходу з автоматичного режиму на ручний і навпаки.
3. Навчитися конфігурувати входи А1 і А2. 4. Навчитись калібрувати входи А1 і А2.
При конфігуруванні входу А1 (пункт меню 3,0-3,7) ми можемо контролювати слідуючи параметри: “Тип датчика”(3,0), “Тип входу”(3,1), “Тип регулятора”(3,5) та інші. Аналогічно конфігурується вхід А2 (при виборів пунктів меню 4,0-4,7). 6,1-калібровка максимуму аналогового входу А1, 6,0-Калібровка нуля аналогового входу А1. При виборі параметрів 7,0 і 7,1 – калібровка входу А2. 5. За виконаною роботою зробити висновки. Лабораторна робота № 10 Обслуговування засобів мікропроцесорної техніки. Клібрування мікропроцесорного індикатора ІТМ-22. Мета роботи: Навчитись програмувати регулятор ІТМ-22 Прилади та обладнання: 1. Мікропроцесорний регулятор ІТМ-22 -1шт. 2. Блок ручого завдання та індикації БРЗ -1шт. 3.Інструкція на прилад ІТМ-22 -1шт. Порядок виконання роботи
1. Вивчити призначення кожного з компонентів передньої панелі. 2. Вивчити методику настройки параметрів вимірювального каналу. 3. Вивчити методику постройки конфігурації логічних зв’язків вимірювальних каналів: вхідного пристрою DO1, DO2, DO3, DO4. 4. Навчитись калібрувати входи2.
Настройка параметрів: Вимірювальні канали входа А1 пункта меню 1.00-1.11. Настроюємо параметри “сигналізація відхилення “max” “, “Тип шкали входа2”(1,07), “Метод лінійної індикації”(1,09), “Точність лінійного індикатора”(1,10) таінші. Аналагічно настроюється канал входа А2. Конфігурування вихідного пристрою DO1: Настраюємо такі три параметри: “Номер аналогового входа для управлыння дискретним виходом DO1”, “Логіка роботи”(не використовуєт’ся більше max і менше min) (3,01), “Установка min DO1”, Установка max DO1”. Аналогічно проводиться настройка DO2, DO3, DO4. Висновок:
Лабораторна робота № 11 Стендова повірка та наладка пневматичного та електричного виконавчих механізмів.
Мета роботи: вивчення методики та отримання практичних навиків в проведенні передмонтажної перевірки і підготовки до роботи багатообертового виконавчого механізму МЕМ-10Б. Прилади та обладнання: 1. Стенд електричних виконавчих механізмів. 2. Механізм виконавчий типу МЕМ-10Б. 3. Мегаомметр М1101. 4. Тестер ТЛ-4М. 5. Набір гайкових ключів. 6. Паспорт на механізм виконавчий багатообертовий типу МЕМ-10Б.
Порядок виконання роботи. 1. Ознайомитись з електричною схемою механізму (“ Паспорт”, стор. 6-7, мал. 3) і методикою його підготовки до роботи. 2. Виконати перевірку механізму і підготувати його до роботи в наступній послідовності: - зняти верхню кришку механізму і провести зовнішній огляд; - ослабити гайку на валу блоку датчиків до вільного обертання; - при настройці механізму з блоком БДИ-6 в діапазоні 0-90 за допомогою ключа сумістити риску 90 профільного кулачка з підшипником на важелі блоку датчиків, а потім виконати настройку дистанційного показчика положення ДУП; - виконати настройку кулачків мікровимикача блока датчиків; - подати живлення; - подачею відповідного сигналу на вхід виконавчого механізму привести його вихідний вал до руху за годинниковою стрілкою і перевірити відпрацювання мікровимикача В1 нажаттям його кнопки. Якщо механізм не зупиниться, необхідно поміняти місцями дві фази живлення електродвигуна; - аналогічним чином перевірити відпрацювання мікровимикача В3; - ввімкнути ланцюг керування в бік руху вихідного органу механізму за годинниковою стрілкою. При натиску на кнопку кінцевого вимикача В2; В4 за допомогою відкрутки, механізм повинен зупинятись; - встановити верхню кришку і закріпити. За виконаною роботою зробити висновок.
Мета роботи: вивчення методики і набуття практичних навиків в перевірці технічного стану, настройці і визначенні технічних характеристик пневматичного мембранного виконавчого механізму типу МИМ. Прилади та обладнання: 1. Мембранний виконавчий механізм МИМ - 1 шт. 2. Манометр зразковий - 1 шт. 3. Редуктор стиснутого повітря РДВ-1 - 1 шт. 4. Набір гаєчних ключів - 1 шт. 5. “ Справочник слесаря по контрольно- измерительньім приборам “ - 1 шт.
Порядок виконання роботи. 1. Ознайомитись з методикою передмонтажної перевірки механізмуМИМ (“ Справочник “, стор. 155-157). 2. Зібрати схему для перевірки механізму і виконати наступні операції: - перевірити і при необхідності відрегулювати відхилення дійсного максимального ходу штоку від умовного; - визначити основну похибку і варіацію виконавчого механізму; - визначити і при необхідності відрегулювати порог чутливості механізму.
Розрахункові формули: а) для перевірки ходу штоку: Х = [(P100-P0)-80]*100/80 б) основна похибка: = (Pp-Pд)*100/80 в) варіація: В = (Pд’-Pд”)*100/80
За отриманими результатами зробити висновок.
Мета роботи: вивчення методики і отримання практичних навиків в наладці однообертових виконавчих механізмів типу МЕО. Прилади та обладнання: 1. Виконавчий механізм типу МЕО. 2. Стенд для перевірки виконавчих механізмів. 3. Підручник “ Наладка приборов и систем автоматизации “ (Б.З.Барласов, В.И.Ильин). Порядок виконання роботи. 1. Ознайомитись з методикою перевірки і настройки виконавчого механізму типу МЕО. Замалювати принципову електричну схему механізму (Підручник, стор. 122, мал. 85,б, стор. 267-269). 2. Підключити МЕО до стенду і в відповідності з методикою, що вказана в підручнику, виконати наступні операції: - опробування дієздатності механізму; - настройку виконавчого механізму на заданий викладачем кут переміщення вихідного валу; - настройку індикатора положення регулюючого органу (ИПУ) на зміну сигналу від 0 до 100% діапазону в відповідності з переміщенням вихідного валу МЕО. За результатами роботи зробити висновок.
Список літератури:
[1] Михайлов Л.М. Проектирование, монтаж и эксплуатация систем автоматизации: Учеб. Пособие. – Л.: Изд-во Ленингр. Ун-та. 1978. – 248с. [2] Монтаж, эксплуатация и ремонт контрольно-измерительных и регулирующих приборов. А.Ф. Попов. М.; „Машиностроение”, 1969, стр.356. [3] Наладка приборов и средств автоматизации. Ученик для ароф.-техн. Училищ. М, „Высш. Школа”, 1975. [4] Справочник слесаря по контрольно – измерительным приборам. – К.: Тэхника, 1988. – 176с. Гресько А.А., Долгая Л.А. [К] Конспект лекцій.
|
|||||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 417; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.218.95.236 (0.01 с.) |

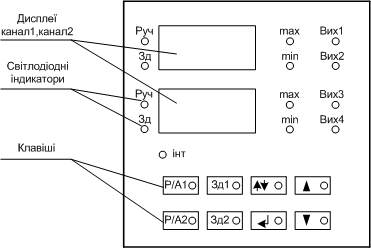


 Перехід з ручного режиму до автоматичного здійснюється натисканням клавіші “Р/А” і підтверджується клавішею. Клавішами і можна змінювати управління виконавчим механізмом.
Перехід з ручного режиму до автоматичного здійснюється натисканням клавіші “Р/А” і підтверджується клавішею. Клавішами і можна змінювати управління виконавчим механізмом.
 Калібровка: В режимі конфігурацій встановлюється параметр 110. До входа А1(А2) підключити джерело постійного струму. При сигналі 0мА(4мА) встановлюється “0” в технічних одиницях, що відповідає 0%. Натискуємо клавішу. Аналогічно встановлюємо параметр 11.1. Для настройки каналу А2 – параметри 12.0 і 12.1.
Калібровка: В режимі конфігурацій встановлюється параметр 110. До входа А1(А2) підключити джерело постійного струму. При сигналі 0мА(4мА) встановлюється “0” в технічних одиницях, що відповідає 0%. Натискуємо клавішу. Аналогічно встановлюємо параметр 11.1. Для настройки каналу А2 – параметри 12.0 і 12.1.


