Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система циклової синхронізації апаратури ІКМ – 30.Содержание книги
Поиск на нашем сайте
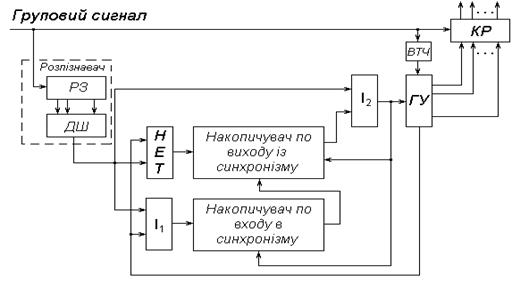
За принципом дії приймачі циклового синхросигналу можуть бути розділені на неадаптивні й адаптивні. У неадаптивних приймачах, ємності накопичувальних пристроїв відповідають передбаченій заздалегідь імовірності спотворення символів у лінійному тракті і не змінюються в процесі роботи. В адаптивних приймачах ємності накопичувальних пристроїв змінюються відповідно до зміни реальних значень цієї імовірності. Структурна схема неадаптивного приймача синхросигналу представлена на рис.4.4. Груповий цифровий потік надходить на вхід розпізнавача синхросигналу, що складається з регістра зрушення (РЗ) і дешифратора (Дш). Кожна комбінація символів, аналогічна синхронізуючій, викликає формування сигналу на виході Дш. Якщо система передачі знаходиться в стані синхронізму, то сигнал з виходу розпізнавача збігається за часом із сигналом з виходу генераторного устаткування (ГУ). При цьому на виході логічного елемента “НЕТ”, з'єднаного з накопичувачем по виходу із синхронізму, сигнал відсутній, а на виході логічного елемента “И1”, з'єднаного з накопичувачем по входу в синхронізм, формується сигнал, що відповідає моменту розпізнавання синхрокомбінації. У результаті накопичувач по входу в синхронізм (розрахований зазвичай на два-три слідуючих підряд імпульси) виявляється заповненим, а накопичувач по виходу із синхронізму (розрахований на чотири-шість слідуючих підряд імпульсів) - розряджений до нульового стану. Помилкові синхрогрупи, які формуються в груповому сигналі внаслідок випадкового сполучення одиниць і нулів, звичайно не збігаються, за часом із сигналом на виході генераторного устаткування, а отже, і не беруть участі у процесі накопичення.
Рис. 4.4 Структурна схема неадаптивного приймача синхросигналу
При короткочасних спотвореннях синхросигналу, які виникають або при збоях синхронізації в системах більш високого порядку, або під впливом завад, сигнал з виходу генераторного устаткування проходить через логічний елемент “НЕТ” на вхід накопичувача по виходу із синхронізму. Але якщо накопичувач не встигне заповнитися, то збою синхронізації не буде, і по першому ж сигналу з виходу накопичувача по входу в синхронізм здійснюється розрядження в нульовий стан накопичувача по виходу із синхронізму. При відсутності синхросигналу в r1 наступних підряд циклах (r1 - коефіцієнт накопичення в накопичувачі по виходу із синхронізму) логічний елемент “И2“ відкривається і перший же імпульс, який сформується на виході розпізнавача з помилкової синхрогрупи, переведе генераторне устаткування і накопичувач по входу в синхронізм у нульовий стан, а накопичувач по виходу із синхронізму - у стан, що відповідає r1 - 1 імпульсам на його вході. Якщо помилкова синхрогрупа сформується на тих самих позиціях у циклі менше, ніж r2 разів підряд (r2 - коефіцієнт накопичення накопичувача по входу в синхронізм), накопичувач по виходу із синхронізму виявиться заповненим і процес розпізнавання групового сигналу продовжиться до моменту формування наступної помилкової синхрогрупи. Відповідний їй сигнал з виходу розпізнавача, пройшовши через відкритий логічний елемент “И2”, встановить ГУ в новий стан. Цей процес триває доти, доки не буде знайдена правдива синхрогрупа. Якщо ж помилкова синхрогрупа сформується на тих самих позиціях у циклі r2 чи більш разів підряд, накопичувач по виходу із синхронізму переходить у нульовий стан і процес розпізнавання групового сигналу припиняється доти, доки знову не заповниться накопичувач по виходу із синхронізму. Звідси випливає, що ємність накопичувача по входу в синхронізм повинна бути обрана таким чином, щоб практично протягом усього часу пошуку стану синхронізму накопичувач по виходу із синхронізму залишався заповненим. При цьому не буде відбуватися істотного уповільнення процесу пошуку синхронізму.
Рис. 4.5. Діаграма роботи неадаптивного приймача синхросигналу При виявленні правдивого синхросигналу накопичувач по входу в синхронізм заповнюється і розряджає накопичувач по виходу із синхронізму в нульовий стан, у результаті чого забезпечується достатня інерційність системи циклової синхронізації в режимі утримання синхронізму. Таким чином, як видно з рис.4.5, у неадаптивному приймачі синхросигналу час відновлення синхронізму t в складається з часу накопичення по виходу із синхронізму t н.вих, часу нагромадження по входу в синхронізм t н.вх і часу пошуку синхросигналу t п. Канальний розподілювач (КР) вмикається по команді з ГУ, і призначений для розподілення групового сигналу по потрібним каналам. Недоліки такого способу побудови приймача циклового синхросигналу визначаються насамперед тим, що значення ємності накопичувачів по виходу із синхронізму і по входу в синхронізм фіксовані. Дійсно, при збільшенні імовірності спотворення символів у лінійному тракті час утримання стану синхронізму виявляється менше необхідного значення, а при зменшенні імовірності спотворення символів має місце запас по часу утримання синхронізму і, отже, необґрунтоване збільшення часу відновлення синхронізму. Оскільки значення імовірності спотворення символів у лінійному тракті протягом усього часу роботи ніколи не може бути точно встановлене заздалегідь, у неадаптивних приймачах циклового синхросигналу практично ніколи не можуть бути досягнуті оптимальні параметри часу відновлення синхронізму і завадостійкості. 4.3. Ключові запитання 4.3.1.Призначення та особливості циклової синхронізації 4.3.2.Назвіть основні параметри СЦС. 4.3.3.Перерахуйте методи побудови СЦС які ви знаєте, зрівняйте їх між собою. 4.3.4.Що таке ефективність використання каналу? 4.3.5. Які критерії використовуються в СЦС? 4.3.6.Як слід вибирати СК? 4.3.7.Як проходить передача данних у первинному цифровому потоці, поясніть його структуру. 4.3.8.В яких станах може знаходитися СЦС? 4.3.9.За допомогою діаграми станів та блок-схеми алгоритму СЦС поясніть її роботу 4.3.10.Поясніть структурну схему приймача синхросигналу. 4.4. Домашнє завдання: 4.4.1. Вивчити по вказаній літературі і даному методичному керівництву призначення, основні вимоги і принципи циклової синхронізації. 4.4.2.Вивчити методи побудови СЦС, переваги та недоліки методів СЦС. 4.4.3.Вивчити структуру первинного цифрового потоку. 4.4.4.Підготуватися до обговорення ключових запитань розділу 3. 4.4.5.Вивчивши структуру первинного цифрового потоку, визначити кількість тактів, яке буде потрібно для відновлення синхронізму (перехід системи із стану S0 в S1). 4.4.6.Аналогічно п. 4.5, розрахувати час втрати синхронізму (перехід системи із стану S3 в S0). 4.4.7.Підготувати протокол по виконанню роботи. 4.5. Лабораторне завдання:
4.5.1.Ознайомитися з середовищем MatLab. 4.5.2. Вивчити алгоритм роботи СЦС первинного цифрового потоку. 4.5.3.Ознайомитися з лабораторним стендом (включити ПК>запустити MatLab>запустити Simulink>відкрити файл SCS.smf). Схему лабораторного стенду занести до протоколу. 4.5.4.Ознайомитися з реалізацією та принципом роботи накопичувача по виходу із синхронізму. По можливості запропонувати свою структуру накопичувача по виходу із синхронізму в середовищі MatLab. 4.5.5.Перевірити роботу системи циклової синхронізації (натиснути на значок Start simulation). 4.5.6.Змінити ємність накопичувача по виходу із синхронізму (двічі нитиснути лівою клавішею “миші” на блок “Накопичувач по виходу із синхронізму”, після відкриття вікна вилучити тригери Т1, Т2; вихід логічної схеми “НЕТ” з’єднати з D ходом тригера Т3), та прослідкувати роботу СЦС. 4.5.7.Змінити синхрокомбінацію (двічі нитиснути лівою клавішею “миші” на блок “Формувач ГС” > за допомогою тригерів змінити синхрокомбінацію), та прослідкувати за роботою системи 4.5.8.Залишивши змінену синхрокомбінацію (відповідно п. 4.5.7) двічі нитиснути лівою клавішею “миші” на блок “Розпізнавач” та налаштувати регістр зсуву на нову синхрокомбінацією (відповідно до п. 4.5.7), прослідкувати роботу СЦС. 4.6.Опис лабораторного макету:
Лабораторний макет реалізований на ПК в середовищі MatLab відповідно до рекомендацій МСЕ G.732 для передачі первинного цифрового потоку зі швидкістю 2048 кбіт/с. Він містить: Формувач групового сигналу (ФГС), Розпізнавач (Р), Генераторне устаткування (ГУ), Канальний озподілювач (КР), Накопичувачі по входу в синхронізм та виходу із синхронізму (Нвх, Нвих), схеми логічних елементів. Кожен з блоків містить генератор імпульсів, який керує роботою тригерів, лічильників. У ФГС міститься вісім послідовно з’єднаних тригерів, які у потрібний момент (по сигналу із лічильника) видають у канал синхрокомбінацію (СК). Р, Нвих, Нвх виконують основні функції системи циклової синхронізації. Р реалізований на основі семи послідовно сполучених тригерів, які відіграють роль регістра зсуву, та схеми &, яка відіграє роль дешифратора. Нвих реалізований на основі шести послідовно сполучених тригерів, які послідовно заповнюються з приходом на вхід Нвих тактового імпульсу відмінного від нуля. Перехід Нвих в стан r-1 відбувається при приході тактового імпульсу відмінного від нуля на вхід!CLR тригера Т6. Нвх являє собою лічильник, який заповнюється при поступанні тактового імпульсу відмінного від нуля на його вхід, і лише після заповнення до вказаної ємності, на його виході з’являється тактовий імпульс, а сам лічильник переходить в нульовий стан. Структури вищеперелічених елементів можна переглянути, двічі натиснувши лівою клавішею “миші” на потрібному блоці. 4.7.Зміст протоколу: 4.7.1.Мета роботи. 4.7.2.Структурна схема СЦС. 4.7.3.Діаграма станів СЦС. 4.7.4.Письмові відповіді на завдання п.п. 4.5, 4.6. 4.7.5.Висновки по роботі. 4.8.Література: 4.8.1. Левин Л. С., Плоткин М. А. Цифровые системы передачи информации. – М.: Радио и связь, 1982. – 216 с. 4.8.2. Передача дискретных сообщений: Учебник для вузов/ В. П. Шувалов, Н. В. Захарченко, В. О. Шварцман и др.; Под ред. В. П. Шувалова. – М.: Радио и связь, - 1990 – 464с. 4.8.3. В. С. Гуров, Г. А. Емельянов, Н. Н. Етрухин, В. Г. Осипов / Передача дискретной информации и телеграфия. Учебник для институтов связи. Изд. 2-е доп., перераб., М., «Связь», - 1974 – 526 с. Лабораторна робота №5 “ ВИВЧЕННЯ ПРИСТРОЮ ПЕРЕТВОРЕННЯ СИГНАЛІВ З ЧМ” Мета роботи. 5.1.1 Вивчення структурної схеми і принципу дії пристрою перетворення сигналів з частотною модуляцією (ППС з ЧМ). 5.1.2 Вивчення вимог стандартів до середньо швидкісних модемів з ЧМ для ПДП по каналу ТЧ. 5.1.3 Набуття практичних навичок проектування СДЕЗ при роботі з бібліотекою Simulink програми Matlab та застосування найважливіших теоретичних знань з дисципліни СДЕЗ. Теоретичні положення. Принципи побудови ППС ЧМ. Сигнали з ЧМ одержали широке розповсюдження при передачі дискретних повідомлень по середньошвидкісним каналам різної природи (проводовим, повітряним та ін.). Це визначається їх високою завадостійкістю і незалежністю від рівня сигналу при зміні загасання каналу. Принцип ЧМ при передачі двійкових сигналів лежить в тому, що в залежності від модуляційного сигналу („1” чи „0”) формуються верхня f1 чи нижня f2 характеристичні частоти: f1=fср+ Основною частиною передатчика ЧМ-сигналу є частотний модулятор, який може бути виконаний різними способами. При реалізації пристроїв на дискретних елементах використовується LC-генератор, частотна модуляція виконується шляхом комутації елементів LC-контуру, тобто безпосередньо діючи на генератор, що знижує стабільність частоти. Зформований таким чином ЧМ сигнал не має розривів фази на границях елементів і характеризується порівняно компактним спектром. В сучасних системах передачі дискректних повідомлень з ЧМ як генератор використовується схема формування еталонних частот. Напруга генератора, частота якого стабілізована кварцовим резонатором (рис.5.2.1), поступає на каскад розділювачів частоти. З їх допомогою формуються частоти mf1 і mf2, в багато раз перевищуючі потрібні f1 і f2. Ці частоти подаються на комутатор, який в залежності від модулюючого сигналу („0” або „1”) пропускає на вихід частоту mf1 або mf2. Вона поступає на розділювач частоти з коефіцієнтом ділення m, на виході якого формується ЧМ – сигнал з заданими характеристичними частотами f2 і f1. Завдяки такій процедурі стрибок фази, що з’являється при комутації частот і приводить до розширення спектру сигналу, зменшується в m раз, що забезпечує спотворення ЧМ – сигналу, якими можна знехтувати.
Рис. 5.2.1. Кварцовий резонатор
Основною операцією прийому такого сигналу являється демодуляція, дозволяюча в залежності від частоти елемента сигналу на тактовому інтервалі (mf1 або mf2) відновити значення приймаємого двійкового символу („0” або „1”). В пристроях, виконаних на дискретних елементах, частотний демодулятор являє собою схему двохсмугового прийому, розділяючу прийнятий сигнал по частоті. Вона включає два ідентичних тракта, кожен з яких включає: смуговий фільтр на верхню f1 або нижню f2 характеристичні частоти; амплітудний детектор і фільтр нижніх частот, виділяючі огинаючу елемента сигналу з f1 або f2. Огинаючі сигналів обох трактів протифазно подаються на суматор і далі на пороговий пристрій, приймають рішення. В пристроях, збудованих на цифрових ІМС, частотний демодулятор використовує принцип виміру тривалості інтервалів між переходами через нуль. Таким чином, вимірювання частот замінюється вимірюванням півперіоду (періоду) прийнятого ЧМ – сигналу. Це вимірювання можна виконати різними способами, наприклад, заповнюючи інтервал високочастотними імпульсами і підраховуючи їх число. Знаючи f1 і f2, можна визначити відповідні числа високочастотних імпульсів і приймати рішення щодо кожного інтервалу, а потім - щодо елементу сигналу. Окрім основних вузлів - модулятора і демодулятора - передавач і приймач ППС ЧМ містять фільтри, підсилювачі, коректори, призначення і робота яких буде описана в розділі 5.3.
|
||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 354; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.99.192 (0.01 с.) |


 f, f2=fср-
f, f2=fср-