
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет траектории центра упругого колеса
где ∆yс – траектория движения центра жесткого колеса Tn= 0 (начальное значение) Tk=2 (конечное значение) ht=0.0333 (шаг) С помощью выведенных (шаг 1.1) уравнений траектории движения центра жесткого колеса на участках A-B, B-C и C-D и формулы траектории центра упругого колеса ∆ys(t) при любом времени t составим таблицу в MicrosoftExcel и получим с помощью данных таблицы графическое изображение траектории движений центров жесткого и упругого колес. Анализируем полученный результат (графики траектории центра жесткого колеса и траектории центра упругого колеса) и сравним эти графики.
Таблица 4 Значения траекторий движения центров жесткого и упругого колес
Рис.5. Траектории: 1) центра жесткого колеса ∆ y с(t)(синяя линия) 2) центра упругого колеса ∆ ys (t)(красная линия) Вывод. Изрис. 5 видим, что траектория центра упругого колеса ∆ys(t): 1. Не имеет скачков скорости ее изменения; 2. Запаздывает на спуске и опережает при подъёме ∆yc(t) на величину Ts – эффективное время сглаживания траектории упругими колесами. Шаг 1. 4. Расчет сглаженной скорости изменения высоты центра упругого колеса График функции Wvs(τ), одновременносглаживающей и дифференцирующей зависимость от времени ∆yс(t) при (–2*ts ≤ τ ≤ 0)методом скользящего усреднения и дифференцирования. Для составления таблицы зависимости сглаженной скорости изменения высоты центра упругого колеса от τ (при при –2*Ts ≤ τ ≤ 0) в MicrosoftExcel воспользуемся формулой
 
Таблица 5 Значения скорости изменения высоты центра упругого колеса от τ
Рис. 6. Скорость Vys (t) изменения траектории центра упругого колеса Вывод. 1. Сглаживание графика функции Vys(t) действительно происходит благодаря амортизации. 2. Амортизация необходима из-за значительных величин скоростей жесткого колеса. 3. Скорость Этап 2 Расчет динамических характеристик Механической системы Согласно принятым допущениям при малых изменениях длины пружины Δ Lpr (t) реакция пружины ( Δ Fpr) находится по линейному закону Гука: Δ Fpr (t)= Kpr Δ Lpr (t)= Kpr [ Δ ys (t)- Δ ym (t)]. Здесь Кр r – коэффициент восстанавливающей силы упругой пружины; Δ ys (t) – ранее найденная временная зависимость относительной высоты оси упругого колеса. Δ ym (t) = ym (t)- ym (0) – изменение начальной высоты массивного тела относительно назальной высоты ym (0) массивного тела при t =0. При малых значениях Vd – скорости перемещения поршня силу Δ Fd (t) будем находить по линейному закону для силы сопротивления жидкого трения: Δ Fd (t) = – CdVd { t)= – Cd [ Vym (t) – Vys { t)] В этой формуле знак силы Δ Fd (t) противоположен Vd (t) – скорости изменения расстояния от поршня до дна корпуса демпфера. Здесь также обозначено: Vym (t) = d / dt [ Δ ym (t)] и Vys (t) = d / dt [ Δ ys (t)] – скорости изменения вертикальной координаты массивного тела и центра колеса. Из физических соображений найдем систему, двух дифференциальных уравнений относительно двух неизвестных функций Δ ym (t) и Vym (t): 1-е дифференциальное уравнение относительно Δ ym (t) и Vym получим из определения скорости тела: d / dt [ Δ ym (t)] = Vym (t) (1) 2-е дифференциальное уравнение получим из 2-го закона Ньютона. Произведение массы тела т на его ускорение d / dt [ Vym (t)] равно алгебраической сумме всех внешних сил, действующих на это тело.
d / dt [ Vym (t)]=(1/ m){ Kpr [ Δ ys (t)- Δ ym (t)]+ Cd [ Vys (t)- Vym (t)] (2)
Согласно принципу Даламбера, любое движущееся массивное тело находится в состоянии динамического (силового) равновесия, если сила инерции тела равна сумме всех внешних сил, действующих на это тело: ∆Fm(t)= ∆Fpr(t)+Fd(t), где ∆Fm(t) – сила инерции массивного тела, вычисляемая по2-му закону Ньютона: ∆Fm(t)=m*(d/dtVym(t)); Vym(t) –вертикальная составляющая скорости тела; ∆Fpr(t)Kpr*[∆ys(t) –∆ym(t)] – избыточная сила сжатия пружины (закон Гука); Fd(t)=Cd*[Vys(t) –Vym(t)] – сила сопротивления движению поршня в жидкости демпфера. Неизвестные функции ∆ym(t) иVym(t)=d/dt∆ym(t)находятся из дифференциального уравнения 2-го порядка: M*(d2/dt2∆ym(t))=Cd*(Vys(t) – d/dt∆ym(t))+Kpr*(∆ys(t) –∆ym(t))
Исходные данные необходимые для расчета динамических характеристик системы(подготовка данных для решения дифференциального уравнения) m =300 Масса тела по умолчанию m=300[кг] X С =1,6 Конечная продольная координата препятствия [м] Tprep =XС/Vx Tprep =2Время прохождения препятствия колесом [с] Tkoleb =1 Период собственных колебаний системы (Tkoleb) cTau =0,45 Отношение постоянной времени затухания колебаний (Tau) к периоду собственных колебаний (Tkoleb) (Tau<Tkoleb). Tau =cTau* Tkoleb Tau =0,45 Постоянная времени затухания колебаний [с] Расчет коэффициента демпфирования Cd: Cd=2m/Tau Cd=1333,33 [H*с/м] Расчет коэффициента упругости пружины Kpr: Kpr =m*[(2π/ Tkoleb)2+(1/Tau)2] Kpr=13333,33 [H/м] Собственные колебания массивного тела fcos 0(t)= e - t / Tau * cos (2 πt / Tkoleb) – реакция системы на единичное вертикальное смещение массивного тела на [1м] fsin 0(t)= e - t / Tau * sin (2 πt / Tkoleb) –реакция системы на единичную вертикальную скорость массивного тела [1м/c] Tkoleb=1 Период собственных колебаний [с]
[c] t=tn, ht..2* Tkoleb t=0,0.004..2 Tprep=2 Время прохождения препятствия колесом [с] Nt =60 Число расчетных шагов по времени tn =0 Начальное значение времени t tk =2 Конечное значение времени t шаг по времени: ht=(tk-tn)/Nt; ht=0,004 С помощью данных уравнений функций fcos 0(t) и fsin 0(t) при t=0,0.004..2составим таблицу зависимостей функций fcos 0(t) и fsin 0(t) от времени t вMicrosoftExcel. С помощью полученных данных таблицы построить графики функций зависимости fcos 0(t) и fsin 0(t) от времени t.
Таблица 6 Значения функций собственных колебаний массивного тела
Fcos0(t) | 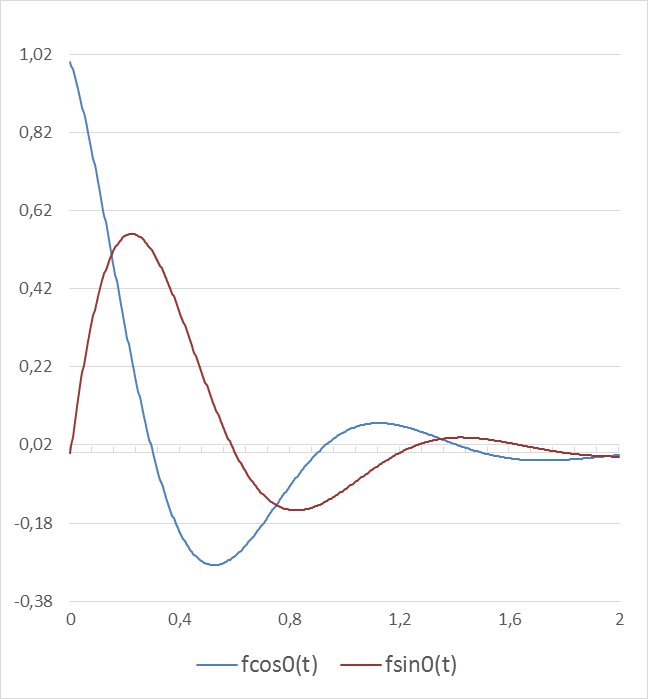 fsin0(t) fsin0(t)
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 1 | 0 | 1 | 0 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2 | 0,033333 | 0,914495 | 0,16125 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 3 | 0,066667 | 0,8103 | 0,294925 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 4 | 0,1 | 0,693459 | 0,400369 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 5 | 0,133333 | 0,569605 | 0,477956 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 6 | 0,166667 | 0,443831 | 0,528937 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 7 | 0,2 | 0,32059 | 0,555279 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 8 | 0,233333 | 0,203639 | 0,559495 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 9 | 0,266667 | 0,096009 | 0,544492 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 10 | 0,3 | 3,15E-17 | 0,513417 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5 7 | 1,866667 | -0,01484 | -0,0054 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5 8 | 1,9 | -0,0127 | -0,00733 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5 9 | 1,933333 | -0,01043 | -0,00875 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6 0 | 1,966667 | -0,00813 | -0,00969 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6 1 | 2 | -0,00587 | -0,01017 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Траекторию центра упругого колеса ∆ys(t) [мм] рассчитаем по формуле:
Траекторию центра упругого колеса ∆ys(t) [мм] рассчитаем по формуле: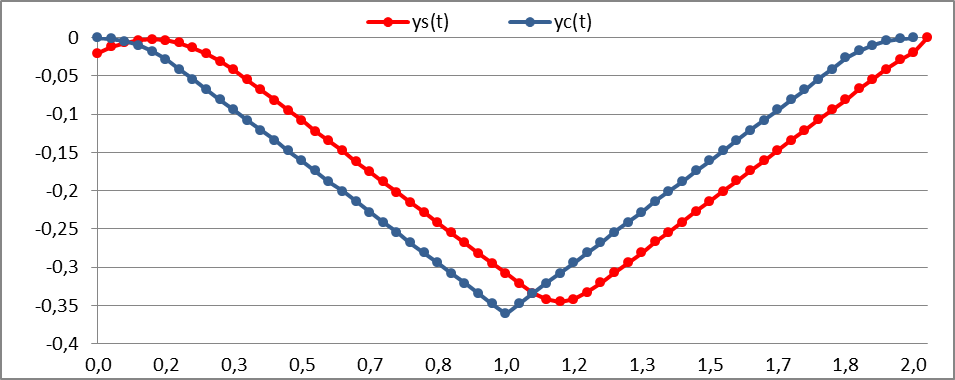
 и построим график функции Wvs(τ).
и построим график функции Wvs(τ).
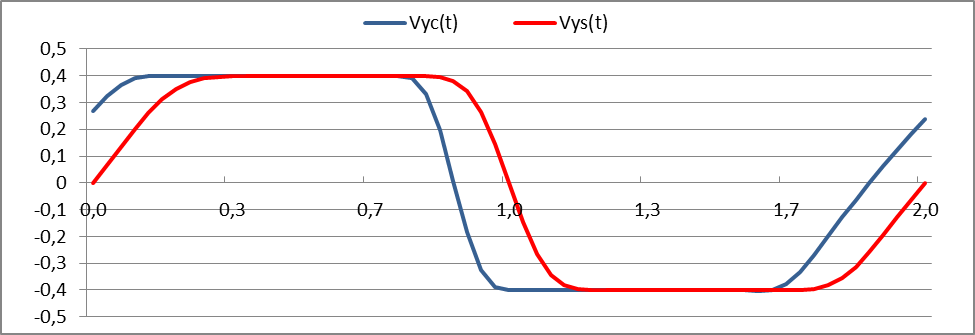
 упругого колеса запаздывает на время Ts – эффективное время сглаживания(с помощью этого моделируется пневматическая шина).
упругого колеса запаздывает на время Ts – эффективное время сглаживания(с помощью этого моделируется пневматическая шина).Рис 7.2 График собственных колебаний
массивного тела, полученный в приложении Excel
из приложения MathCAD
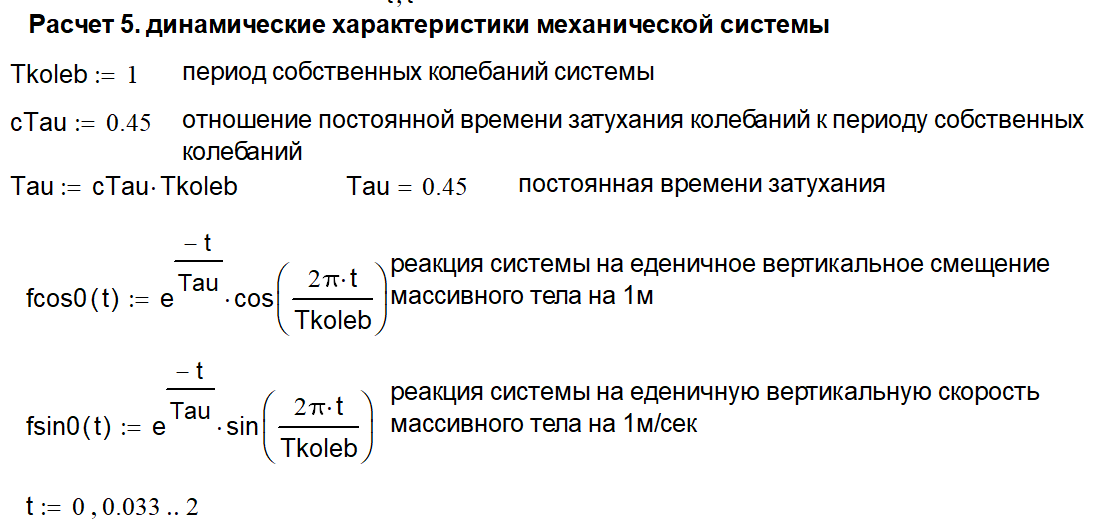

Рис 7.1 График собственных колебаний массивного тела, полученный в приложении MathCAD



