Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Математическая модель задачи
Математической моделью задачи называется набор формул, уравнений, систем алгебраических или дифференциальных уравнений, отражающих физические процессы и законы, использованные в физической модели. В данной работе эти математические выражения отражают перечисленные выше физические законы. Этапы выполнения курсовой работы Работа в целом состоит из следующих взаимно связанных подзадач: 1. Расчет траектории центра жесткого колеса (относительные координаты траектории ΔY с (X) и зависимость от времени Δyc (t) с учетом только формы препятствия, радиуса колеса R и горизонтальной скорости Vx). 2. Расчет сглаженной траектории оси упругого колеса (зависимость от времени Δys (t) и скорость ее изменения Vs (t) = d / dt [ Ays (t)]). 3. Расчет координат Δym (t), вертикальной составляющей скорости Vym (t) массивного тела, а также вертикальной составляющей его ускорения am (t). 4. Исследование кинематических и динамических характеристик системы при изменении одного из ее параметров (по варианту27). Вся курсовая работа выполнена в 3 этапа. Для выполнения каждого этапа работы использована своя группа исходных данных, а также результаты выполнения предыдущих этапов. На каждом этапе работы часть исходных данных задается непосредственно, а другие – вычисляются либо через коэффициенты пропорциональности уже заданных или вычисленных величин, либо по другим формулам.
Этап 1 3.1 Расчет координат центра упругого колеса и скорости их изменения по участкам траектории центра жесткого колеса Исходные данные для расчета кинематических характеристик системы: R=0.33 Радиус колеса, [м]; H=0.4 Высота препятствия, [м]; L=4*H; L=1.6 Длина препятствия, [м]; Vx=0.8 Горизонтальная скорость системы, [м/с]; cLs=0.4; Ls=cLs*R; Ls=0.132 Длина сцепления колеса с опорой, [м]; Ts=Ls; Ts=0.132Эффективное время сглаживания траектории центра жесткого колеса, [с]; Xk=1.6 Конечное значение продольной координаты по умолчанию [м] tk=Xk/Vxtk=2 Конечное значение времени наблюдения [с] при расчете кинематики системы Шаг 1. 1. Расчет координаты точек
из приложения AutodeskInventor
Рис. 2. Эскиз ожидаемой траектории центра жесткого колеса 1.1.1 Расчет точки координат
Таким образом, координаты точки
1.1.2 Расчет точки координат
Таким образом, координаты точки
1.1.3 Расчет точки координат
Таким образом, координаты точки
1.1.4 Расчет точки координат
Таким образом, координаты точки Шаг 1. 2. Расчет уравненийтраектории ∆ Y (x) участков
1.2.1 Расчет уравнения траектории 1-го участка
Вывод: т.к. результаты расчетов ∆Y(x) на границах 1-го участка совпадают с заданными, а в центре участка значение ∆Y(x)совпадает с чертежом, то функция ∆Y(x) найдена верно. 1.2.2 Расчет уравнения траектории 1-го участка Используя метод линейной интерполяции
Вывод: т.к. результаты расчетов ∆Y(x) на границах 2-го участка совпадают с заданными, а в центре участка значение ∆Y(x)совпадает с чертежом, то функция ∆Y(x) найдена верно. 1.2.3 Расчет уравнения траектории 1-го участка Используя метод линейной интерполяции
Вывод: т.к. результаты расчетов ∆Y(x) на границах 3-го участка совпадают с заданными, а в центре участка значение ∆Y(x)совпадает с чертежом, то функция ∆Y(x) найдена верно. 1.2.1 Расчет уравнения траектории 1-го участка
Вывод: т.к. результаты расчетов ∆Y(x) на границах 1-го участка совпадают с заданными, а в центре участка значение ∆Y(x) совпадает с чертежом, то функция ∆Y(x) найдена верно.
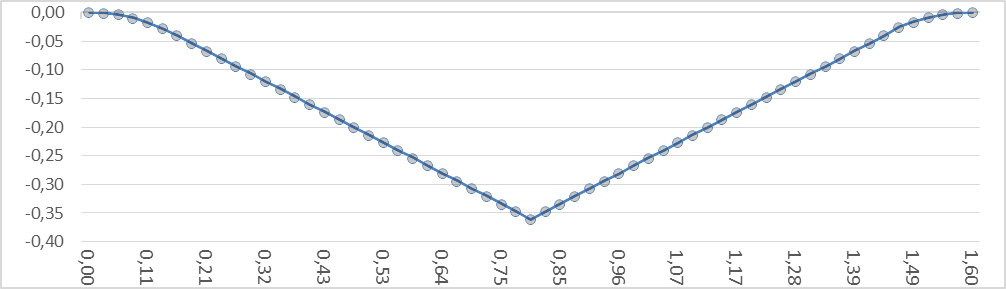
С помощью полученных уравнений (шаг 1.2)траектории движения центра жесткого колеса научастках
Таблица 1 Значения координат перемещения центра жесткого колеса
Рис. 2. Траектория движения центра жесткого колеса Вывод. Из графика траектории движения жесткого колеса видно: 1. Траектория более сглаженная и плавная, чем само препятствие. 2. График траектории движения жесткого колеса соответствует реальной траектории движения жесткого колеса. 3. При преодолении препятствия жестким колесом происходит сглаживание острых углов препятствия.
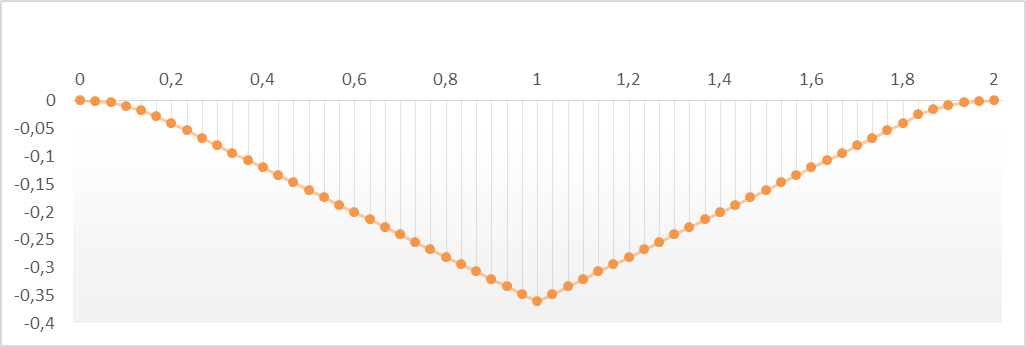
Шаг 1. 2. Расчет зависимости от времени высоты центра жесткого колеса ∆ yc (t). Функция зависимости от времени высоты [м] оси жесткого колеса при любом времени t: ∆yc(t)= ∆Yc(t*Vx) tn=0(начальное значение времениt) tk= 2 (конечное значение времениt) ht=(tk-tn)/60 (шаг времениt) ht=0.033333333 tc = tn, ht..tk С помощью выведенных (шаг 1.1) уравнений траектории движения центра жесткого колеса на участках A-B, B-Cи C-D и формулы зависимости от времени высоты оси жесткого колеса ∆yc(t)= ∆Yc(t*Vx) при любом времени t составим таблицу в MicrosoftExcel и получим графическое изображение зависимости высоты центра жесткого колеса от времени.
Таблица 2 Значения высоты центра жесткого колеса от времени
Рис 3. Зависимость высоты центра жесткого колеса от времени Вывод. из графика зависимость высоты центра жесткого колеса от времени видно:
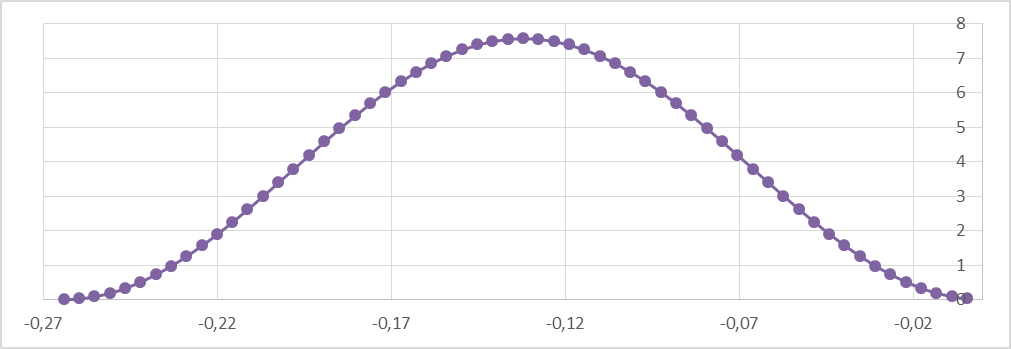
1. Траектория более растянута по сравнению с траекторией Рис2. Шаг 1. 3. Расчет траектории центра упругого колеса ∆ ys (t) График функции Wys(τ),сглаживающей зависимости от времени∆yc(t) – высоты центра упругого колеса (–2*Ts ≤ τ ≤ 0): ПРОВЕРКА нормировки Wys(τ) (вручную)
Наши данные: Ts=0,132 (эффективное время сглаживания траектории упругими колесами)
hτ=Ts/60 hτ=0,0022τn= – 2*TSτn= –0,264 τk=0 τ=τn, τn+hτ.. τk Cоставим таблицу в MicrosoftExcel и получим графическое изображение сглаживающей функцииWys(τ). Таблица 3 Значения сглаживающей функции
Рис. 4.Сглаживающая весовая функцияW ys (τ) Вывод. На графике видно, что функция Wys(τ) действительно является сглаживающей (сглаживает зависимость высоты центра упругого колеса от времени) Ts – эффективное время сглаживания траектории упругими колесами).
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 50; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.216.124.145 (0.109 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 (центра жесткого колеса) при преодолении препятствия относительно его положения при соприкосновении колеса с препятствием
(центра жесткого колеса) при преодолении препятствия относительно его положения при соприкосновении колеса с препятствием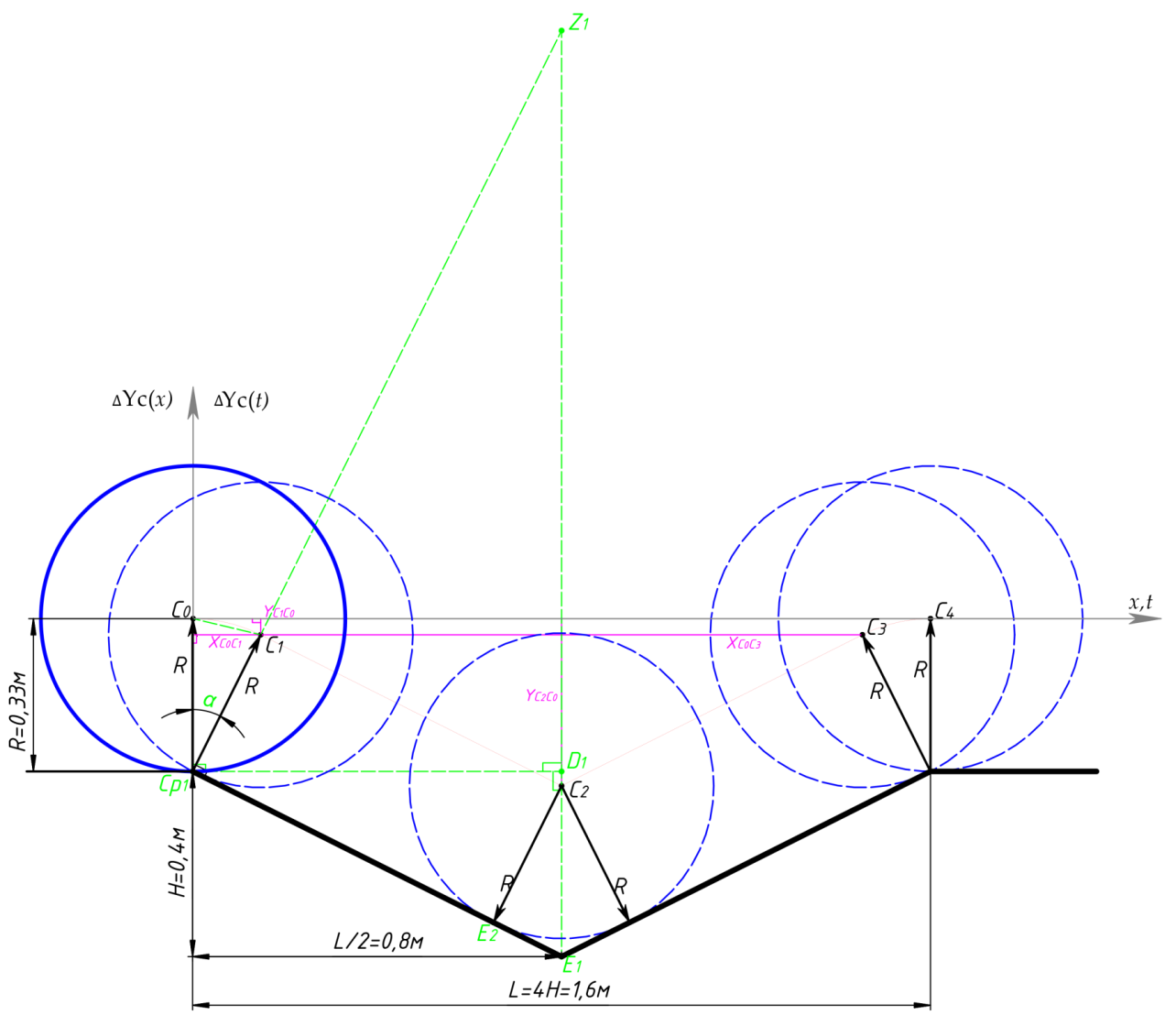
 :
:  2)
2)  ;
;  ;
; 

 3)
3) 
 4)
4) 
 5) По теореме Пифагора
5) По теореме Пифагора 

 (
( )
) :
: 
 По теореме синусов
По теореме синусов  7)
7)  8)
8) 
 (
( )
) :
:  10)
10) 
 (
( )
) :
:  12)
12) 
 (
( )
)

 :
: 2)
2) 






 :
: 4)
4) 





 :
: 6)
6) 





 :
: 8)
8) 




 составим таблицу в MicrosoftExcel и построим график траектории движения центра жесткого колеса.
составим таблицу в MicrosoftExcel и построим график траектории движения центра жесткого колеса.