Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Разработка схемы управления привода подъемаСодержание книги
Поиск на нашем сайте
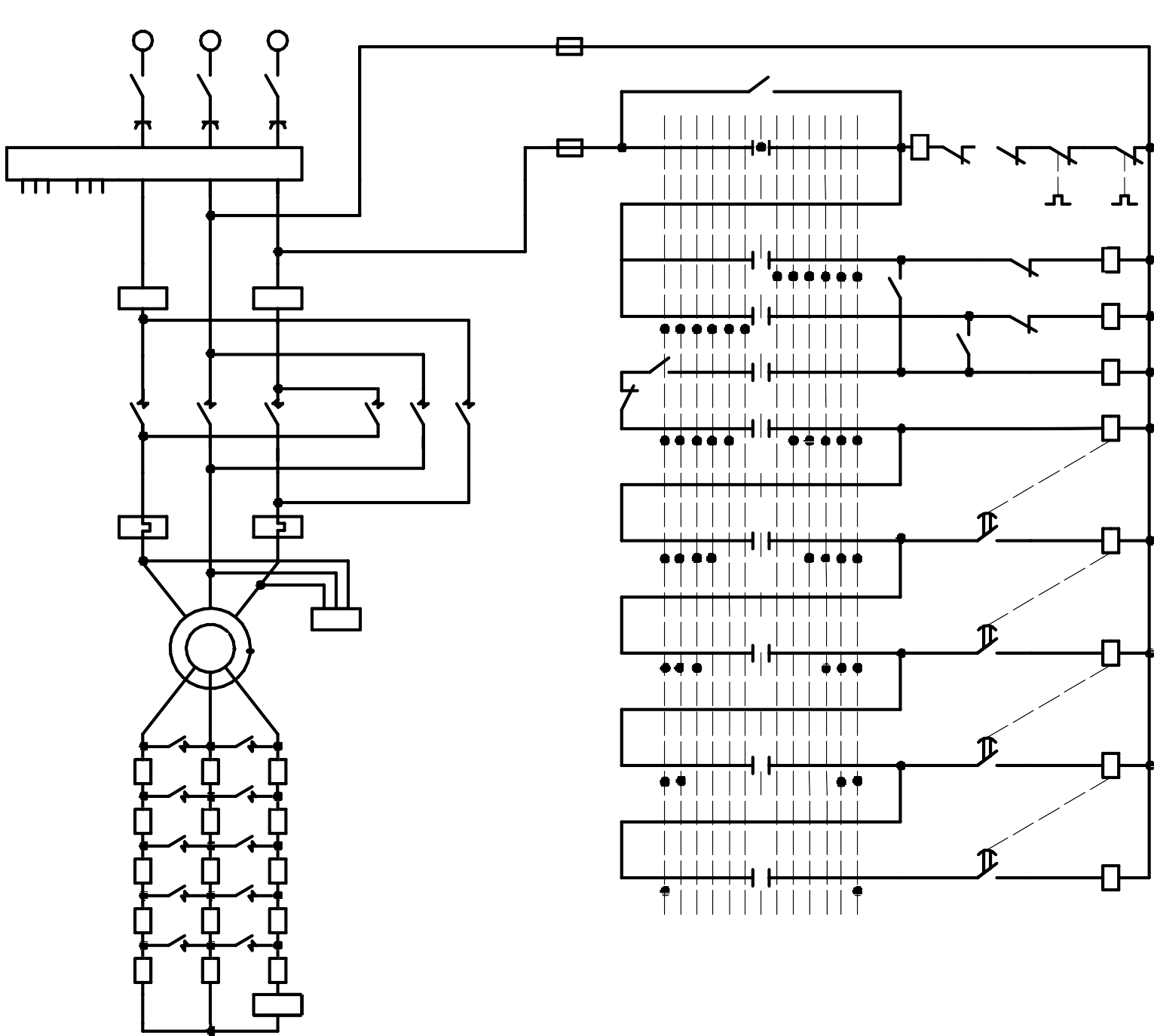
Схемы электроприводов с силовыми кулачковыми контроллерами и торможением противовключением широко применяются для тихоходных кранов малой и средней грузоподъемности при отсутствии специальных технологических требований в отношении точности остановки и посадки груза из-за простоты, надежности и невысокой стоимости (выше приведённые характеристики полностью удовлетворяет нашим условиям). Регулирование скорости подъема и спуска осуществляется путем изменения величины сопротивления резисторов, включенных в цепь ротора. На рис. 5 приведена схема асинхронного электропривода с кулачковым контроллером. Контроллер имеет шесть фиксированных положений для каждого направления движения и обеспечивает ступенчатый спуск, ступенчатое регулирование скорости, реверс и торможение.
Рисунок 5 - Принципиальная схема управления крана Подача питания на кран осуществляется ящиком с рубильником Q. От него питание подаётся на троллеи, с них – снимается через скользящий токосъёмник и подаётся на привод подъёма крана (троллеи, вводные и защитные устройства крана, а также управление другими приводами на схеме не показаны). Контакторы КМ1 и КМ2 обеспечивают подъём и спуск. Электромагнитные реле КА1 и КА2 выполняют максимально-токовую защиту (от КЗ), электротепловые реле КК1 и КК2 – защищают двигатель от перегрузки. Электромагнитный тормоз YB, работающий на растормаживание, предотвращает падение груза при пропадании питания в сети. Резисторы R1, R2 и RП обеспечивают регулирование скорости подъёма и спуска, а также используются при пуске. Основным элементом управления является командоконтроллер К0 – К5. С помощью перемещения его рукоятки выполняется переключение цепей управления, подающих питание на катушки контакторов и реле и, тем самым, регулирование скорости и переключение подъём-спуск. Например, в положении 2В получают питание катушки контакторов КМ1 и КМ. Контакторы срабатывают, замыкают свои контакта в силовой цепи. КМ1 подаёт питание на статор двигателя, обеспечивая его работу «Вперёд» (на подъём), КМ3 шунтирует (закорачивает) резисторы RП в роторных цепях, обеспечивая работу на второй характеристике (nо – Г – Д). Реле времени КТ1 и КТ2 обеспечивают выдержку времени при выведении резисторов R1 и R2 при пуске (более плавный разгон). Например, при работе в положении 2В (смотри выше) срабатывает реле времени КТ1 и начинает отсчёт выдержки времени. Выведение резистора R1 и последующий разгон будут возможны только после окончания выдержки и замыкания контакта КТ1. Реле КА3 контролирует ток в роторе и обеспечивает своевременное выведение резистора RП при реверсе. Реле KV1 обеспечивает отключение питания схемы управления и двигателя при любых аварийных режимах (КЗ, перегрузка) и нулевую защиту.
|
||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 164; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.41 (0.009 с.) |