Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Датчики дискретных параметровСодержание книги
Поиск на нашем сайте
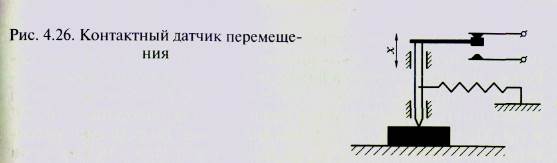
К основным дискретным параметрам, преобразуемым датчиками в электрические сигналы, можно отнести состояние объекта («включен —выключен», «открыт—закрыт» и т.д.) и количество объектов. Частным случаем параметра «состояние» можно считать параметр «код» (операции, позиции и т.д.), который, как и состояние, определяется по некоторому признаку или набору признаков.Как уже говорилось ранее, любой аналоговый (т.е. непрерывный) параметр может быть дискретизирован, т.е. представлен набором значений, отличающихся одно от другого на определенную величину. Предположим, что суппорт обрабатывающего станка может иметь фиксированные значения угла поворота 0, 10, 20° и т.д. Угол поворота — величина аналоговая, но если пронумеровать положения суппорта, то мы будем иметь дело с дискретными величинами — кодами позиций: 1, 2, 3 и т.д. Для получения информации о том, на какой угол повернут суппорт в данный момент, можно использовать датчик углового перемещения, но если на суппорте есть указатель, по которому можно определить код позиции суппорта, то проще использовать датчик состояния. Разница между датчиками состояния и количества заключается в следующем. Датчик состояния формирует электрический сигнал, однозначно соответствующий одному из двух или нескольких признаков состояния объекта. Например, двигатель включен — на выходе датчика есть сигнал; двигатель выключен — на выходе датчика сигнала нет. И наличие, и отсутствие сигнала содержат информацию о состоянии объекта. Датчик количества формирует сигнал при наличии единственного признака (например, при наличии изделия на конвейере), после чего он возвращается в исходное состояние. При каждом очередном появлении этого признака формируется новый сигнал, т.е. именно в наличии этого сигнала заключается полезная информация. Сигналы с датчика количества поступают на устройство обработки дискретных сигналов — счетчик, который подсчитывает количество поступивших сигналов, а значит, количество объектов, с которыми связан датчик. Сигналы с датчика состояния поступают на другое устройство — регистр, по которому оператор или управляющее устройство судят о состоянии объекта, с которым связан датчик. Простейший датчик дискретных параметров — контактный (рис. 4.26). Его дискретный входной параметр — перемещение; дискретная выходная величина — сопротивление электрической цепи, которое может быть или равным нулю (контакты замкнуты), или бесконечно большим (контакты разомкнуты). Дискретность входного параметра означает, что датчик воспринимает только два значения перемещения движущегося штока относительно его начального положения: либо перемещение меньше определенного значения и контакт разомкнут, либо больше и контакт замкнут. Такой датчик может использоваться, например, как концевой выключатель цепи управления движущимся элементом, достигшим крайнего положения, или для контроля предельно допустимого размера деталей на конвейере. Погрешность его может быть очень маленькой — около 1 мкм. 100
Широко используются для преобразования дискретных сигналов оптические датчики. В подразд. 4.2.3 была рассмотрена работа оптического датчика как преобразователя аналоговой величины (углового перемещения), работающего в дискретном режиме. Но он может использоваться также и как датчик состояния, и как датчик количества. В первом случае объект, состояние которого контролируется, должен быть снабжен непрозрачным «флажком», который при одном состоянии объекта перекрывает поток света от источника к приемнику излучения, а при другом его состоянии пропускает этот поток. Соответственно в цепи приемника излучения либо нет тока, либо он есть. Роль флажка может выполнять и сам контролируемый объект. В режиме датчика количества источник и приемник излучения располагаются так, что каждый очередной объект, подлежащий счету, перекрывает оптический канал и очередной сигнал с приемника излучения передается на счетчик. Оптические датчики удобны тем, что в них отсутствует механический контакт с контролируемым объектом. Они широко используются не только для измерения и контроля технологических параметров, но и для защиты обслуживающего персонала от попадания в опасную зону. В такой ситуации сигнал с датчика может не только предупредить персонал об опасности, но при необходимости автоматически отключить оборудование во избежание травмирования людей. Комбинация дискретного контактного датчика с первичными механическими преобразователями позволяет создавать дискретные датчики аналоговых параметров, называемые релейными. Контактный датчик размещается рядом с механическим преобразователем, выходной величиной которого является перемещение (например, пружинным преобразователем силы, сильфонным преобразователем давления или биметаллическим — температуры). По достижении заданного значения параметра перемещающийся элемент замыкает контакты датчика, формируя выходной сигнал. При изменении параметра в обратном направлении контакты снова размыкаются, причем обычно имеется небольшая разница в значениях параметров, соответствующих замыканию и размыканию контактов (гистерезис). 101
Контрольные вопросы 1. Дайте определение датчика. 2. Почему именно в электрический сигнал датчик преобразует технологический параметр? 3. Какие датчики называются активными? Назовите их. 4. Назовите основные выходные параметры пассивного датчика. 5. Перечислите основные характеристики датчиков. 6. Перечислите виды датчиков перемещения. Что является их входной и выходной величиной? 7. Назовите основные датчики деформации, силы. Что является их входной и выходной величиной? 8. Назовите основные датчики температуры. Что является их входной и выходной величиной? 9. Назовите основные датчики дискретных параметров. Какие принципы положены в основу их работы?
Г ЛАВА 5 УСТРОЙСТВА ПРЕОБРАЗОВАНИЯ СИГНАЛОВ Если человек сильно утомлен, то может не заметить, например, идущего ему навстречу приятеля или не услышать с первого раза звонок в дверь. Но ведь его датчики — глаза и уши — получили информацию и преобразовали ее в сигналы, поступившие в нервную систему. Почему же мозг не отреагировал на эти сигналы? Возможно, потому, что они оказались слишком слабыми — из-за переутомления ваша нервная система не обеспечила необходимое усиление этих сигналов или не смогла выделить их на фоне других поступивших сигналов (помех). В технических системах тоже возможны ситуации, когда сигналы датчиков слишком слабые, сопровождаются помехами, поэтому в них большое внимание уделяют устройствам преобразования сигналов. Эти устройства обеспечивают: • передачу информационных сигналов от датчиков к аппаратуре обработки сигналов и управляющих сигналов к исполнительным механизмам; • предварительную обработку (нормализацию) сигналов датчиков; • усиление сигналов; • коммутирование сигналов; • преобразование аналоговой величины в дискретную, и наоборот; • подсчет событий; • хранение информации; • формирование управляющих сигналов для исполнительных механизмов. Переходные устройства Современные системы управления технологическими процессами включают в себя сотни датчиков и исполнительных механизмов. Каждый из них надо подключить к аппаратуре управления, расположенной во многих случаях на большом удалении от технологического оборудования. Прокладывать от каждого датчика отдельный кабель на такое расстояние дорого и громоздко, гораздо дешевле и компактнее использовать многожильные кабели. Но ведь для подключения одного датчика достаточно всего 2...4 провода. Компромиссом в этой ситуации является разделение соединительных линий на участки, на каждом из которых используется оптимальный вид кабеля, а стыковка участков обеспечивается соответствующими соединительными устройствами — разъемами и клеммными колодками. Датчики, расположенные на оборудовании близко друг от друга, объединяются в группы, и хотя от каждого датчика идет 2-или 4-жильный кабель, от всей группы сигналы передаются уже по многожильным (до нескольких десятков жил) кабелям. Стыковка кабелей производится с помощью клеммных колодок (рис. 5.1). Аналогично подключаются и исполнительные механизмы. Кабели, провода, разъемы и клеммные колодки составляют группу переходных устройств. Выходная цепь датчика заканчивается обычно 2- или 4-контактным разъемом. Ответная часть разъема соединяется с клемм-ной колодкой, располагаемой непосредственно на технологическом оборудовании или вблизи него. Клеммные колодки, содержащие набор клемм, позволяют подключать соединительные провода, как правило, под винт. Концы проводов должны быть облу-жены. В качестве соединительных проводов для датчиков используются 2- или 4-жильные кабели управления соответствующего сечения (обычно 0,35 или 0,50 мм2). Для подключения исполнительных механизмов используют кабели, имеющие от 4 до 10 жил, поскольку по ним не только передаются сигналы управления, но и принимаются сигналы с датчиков состояния ИМ. Ко второй стороне клеммных колодок подключаются информационные (передающие сигналы от датчиков) и управляющие Рис 5.1 клеммная колодка. 104 Рис. 5.2. Бронированный (а) и экранированный (б) кабели (передающие управляющие сигналы к ИМ) кабели. Это многожильные кабели, соединяющие технологическое оборудование с аппаратурой управления, которая обычно размещается в непосредственной близости от ЭВМ и на значительном расстоянии от технологического оборудования (до нескольких километров). На пути от технологического оборудования до аппаратуры управления сигналы претерпевают различные изменения, вызываемые воздействием внешних электрических и магнитных полей. Если эти воздействия сильны, то полезная информация искажается и приходит к аппаратуре управления с ошибками. Для устранения или уменьшения ошибок принимают определенные меры. Это, в первую очередь, правильный выбор типа кабелей и выбор способа их прокладки. В качестве информационных и управляющих кабелей основное применение нашли кабели марки КУПВ и КУПР — кабели управления в поливинилхлоридной и резиновой изоляции. Сечение жил кабелей 0,35, 0,50, 0,75 и 1,00 мм2; количество изолированных многопроволочных медных жил — от 4 до 37. Промышленностью выпускаются кабели с общим экраном из переплетенных медных проводов или алюминиевой фольги, с отдельными экранированными жилами и витыми парами жил. Для защиты от механических повреждений кабели могут покрываться сверху броней из стальной проволоки — бронированные кабели (рис. 5.2, а). Общий медный экран (рис. 5.2, б) защищает передаваемые по жилам сигналы от внешних переменных электрических полей. Кабели с отдельными экранированными жилами (рис. 5.3, а) используют для исключения взаимного влияния сигналов, передаваемых в одном кабеле. Это особенно касается маломощных сигналов, например сигналов от датчиков температуры. Витая пара жил (рис. 5.3, 6) защищает передаваемый сигнал от внешних магнитных полей, создаваемых работающими вблизи 105 Рис. 5.3. Кабели с экранированными жилами (а) и витыми парами (б) кабельных трасс трансформаторами, сварочными аппаратами, электродвигателями и т.д. Пересекая жилы витой пары, переменное магнитное поле в соответствии с законом электромагнитной индукции наводит в них ЭДС определенного знака. На длине, равной периоду скрутки, знаки ЭДС противоположны и суммарная ЭДС равна нулю. Чем меньше период скрутки, тем меньшее влияние магнитные поля оказывают на передаваемый сигнал. Большую роль в передаче сигналов играет способ прокладки информационных и управляющих кабелей. Наиболее применимые способы прокладки — на лотках и в коробах. В обоих случаях рекомендуется во избежание влияния мощных управляющих сигналов на слабые сигналы от датчиков информационные кабели прокладывать отдельно от управляющих на своих лотках (рис. 5.4, а) или в своих коробах (рис. 5.4, б). При этом расстояние между лотками (коробами) должно быть не менее 300 мм. Стр 106
На стороне аппаратуры управления концы информационных и управляющих кабелей подводятся и подключаются к клеммным стойкам, которые представляют собой набор клеммных колодок, располагаемых на специальных рельсах. К одной стороне этих колодок и подключаются кабели. Ко второй стороне подключаются кабели, заканчивающиеся разъемами, которые подсоединяются к блокам системы управления (устройствам нормализации сигналов, запоминающим устройствам, выходным регистрам и т.д.). Весь комплекс переходных устройств показан на рис. 5.5. Таким образом, переходные устройства в процессе передачи сигнала играют такую же важную роль, как и остальные технические средства АСУ ТП.
|
||||
|
|
Последнее изменение этой страницы: 2021-04-14; просмотров: 490; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.181.181 (0.009 с.) |