Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Микропроцессорные управляющие устройства
С появлением микропроцессоров (МП) началась новая эпоха в автоматизации производственных процессов. Благодаря способности устройств на базе МП практически мгновенно реагировать на любые события в технологическом процессе, воспринимать за короткое время информацию, поступающую с большого количества различных датчиков, и формировать большое количество управляющих сигналов микропроцессоры получили широкое распространение на всех уровнях — от сбора и обработки данных до полного ведения технологического процесса. Изменилась и форма представления информации оператору и ее регистрации. Микропроцессор — информационное устройство; он работает с информацией, представленной в виде двоичных чисел. Огромная эффективность МП как ключевого элемента средств управления базируется на двух принципах: • любое значение любой физической величины можно записать в виде двоичного числа; • любое действие любого исполнительного механизма можно закодировать в виде двоичного числа. 160 Следовательно, организовать причинно-следственную связь между значением технологического параметра (причиной) и требуемым воздействием на исполнительный механизм (следствием) можно путем перехода от одного двоичного числа к другому, выполненного по определенным правилам. Такой переход и осуществляет микропроцессор, преобразуя с помощью арифметических и логических операций одни двоичные числа в другие. Какие именно операции нужно произвести, указывает программа управления работой МП, составленная на основе анализа зависимости между значением данного параметра и результатом воздействия данного ИМ на технологический процесс. Микропроцессор — это программно-управляемое устройство, производящее преобразование двоичных чисел и выполненное в виде одной или нескольких интегральных схем. Все другие функции микропроцессора, такие как обработка информации и формирование управляющих воздействий, относятся не к МП, а к управляющей программе. Общая схема микропроцессора приведена на рис. 7.3, а. Микропроцессор состоит из арифметико-логического устройства (АЛУ), устройства управления (УУ) и внутренней памяти — регистров общего назначения (РОН). Устройства связаны тремя шинами. Каждая шина — это группа проводников, по которым передаются двоичные коды в виде сигналов 0 или 1.
Арифметико-логическое устройство выполняет арифметические (сложение, умножение) и логические (И, ИЛИ) операции над 8- или 16-разрядными двоичными числами. Числа поступают с шины данных через регистры, обеспечивающие их временное хранение. Устройство управления координирует работу АЛУ и регистров в соответствии с командами программы. Устройство управления получает команды с шины данных через дешифратор команд. Команда представляет собой двоичное число: одна его часть — код операции, которую предстоит выполнить АЛУ, а другая часть указывает адрес расположения числа, над которым будет совершена операция (например, один из регистров РОН). Второе число поступает в АЛУ по шине данных. Результат выполнения операции записывается в один из регистров и далее поступает на шину данных. Современные микропроцессоры состоят из миллионов транзисторов и выполняют сотни миллионов операций в секунду. Если снабдить МП более мощной памятью, устройствами ввода-вывода информации, а при необходимости и пультом управления, позволяющим вводить и отлаживать новые программы, то он превратится в микроЭВМ. Структурная схема микроЭВМ на базе МП приведена на рис. 7.3, б. 161
МикроЭВМ имеет два вида памяти: постоянное (ПЗУ) и оперативное (ОЗУ) запоминающие устройства. Содержимое ПЗУ записывается изготовителем микроЭВМ и не может быть стерто. В ПЗУ хранят программы начальной загрузки микроЭВМ, константы, табличные данные и т.д. В ОЗУ информацию можно записывать и стирать многократно, поэтому оно используется для оперативного хранения данных, подлежащих обработке, промежуточных результатов, отладки программ и т.д. При выключении микроЭВМ информация в ОЗУ пропадает. Устройства ввода и вывода обеспечивают прием и выдачу двоичных кодов обмена информацией с внешними устройствами. Шины адресов, данных и управления используются для обмена информацией между всеми подключенными к ним устройствами в режиме разделения времени. Микропроцессор управляет подключением к шинам в каждый момент времени тех или иных устройств; для остальных устройств шины в это время недоступны.
Обычно микроЭВМ представляет собой набор унифицированных микросхем: микропроцессор, ПЗУ, ОЗУ и др. Все они согласованы между собой по уровням сигналов, входному и выходному сопротивлению, допустимым нагрузкам и иным параметрам. Совершенствование технологии производства интегральных микросхем позволило создать микроЭВМ, которые вместе с жестким магнитным диском (долговременная память) размещаются в унифицированном герметичном корпусе, легко встраиваемом в каркас аппаратуры систем управления. Варианты использования микропроцессоров и микроЭВМ в системах управления многообразны. До появления микроЭВМ системы управления были централизованными и одна мощная и быстродействующая ЭВМ обслуживала поочередно десятки и сотни датчиков и исполнительных механизмов. В современных децентрализованных системах управления центральная ЭВМ может отсутствовать вообще или использоваться только для учета и координации работ, а множество автономных микроЭВМ выполняют функции управления различными единицами оборудования и участками технологического процесса, вплоть до управления отдельными параметрами процесса. На рис. 7.4 представлена укрупненная схема одноконтурной системы управления, обеспечивающей поддержание заданного значения регулируемого параметра объекта управления. Она иллюстрирует возможности устройства с ЭВМ в выборе оптимального варианта управления. МикроЭВМ не просто сравнивает значение регулируемого параметра с заданным, а учитывает результаты проведенного ею анализа поведения параметра в предшествующий период и выбирает наилучший в этой ситуации закон регулирования. 163
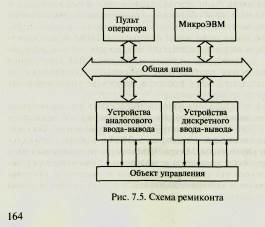
Устройства на базе микроЭВМ, специально ориентированные на выполнение задач контроля и управления в локальных (местных) системах, получили название «ремиконты» (РЕгулирующие МИкроКОНТроллеры). Кроме микроЭВМ они включают в себя устройства преобразования аналоговой и дискретной информации, которые называются устройствами ввода-вывода информации, и пульт оператора (рис. 7.5). Общая шина контроллера позволяет связывать его с другими аналогичными устройствами и главной ЭВМ. При необходимости перестройки системы управления достаточно изменить программу в микроЭВМ, не заменяя блоков и не перепаивая отдельных элементов. Наряду с микроЭВМ в промышленности применяются программируемые контроллеры (ПК). Их используют в случаях, когда управление производится по результатам логической обработки входных сигналов без проведения вычислительных работ. Такой контроллер обычно не имеет средств для работы со стандартными языками программирования, применяемыми в микроЭВМ.
Программа, вводимая в ПК, содержит набор команд управления, представленных на языке релейно-контактных схем или на аналогичном языке. Фактически программируемые контроллеры заменяют широко использовавшиеся ранее релейно-контактные системы управления, существенно превосходя их по надежности, удобству перепрограммирования и возможностям связи с системой управления производством предприятия. Программируемые контроллеры содержат кроме микропроцессора и источника питания большее или меньшее (в зависимости от объекта управления) количество устройств преобразования информации, предназначенных для связи с технологическим оборудованием. Это устройства ввода данных, соединяемые с датчиками и преобразующие их аналоговые и дискретные сигналы в двоичные коды, принимаемые микропроцессором, и устройства вывода управляющих сигналов, соединяемые с исполнительными механизмами. При необходимости количество этих устройств может изменяться.
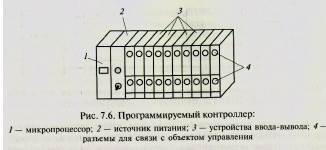
Микропроцессор, источник питания и устройства преобразования информации выполняют единообразными по конструкции и размещают в общем каркасе, соединяя их общими шинами и кабелями в единый контроллерный блок (рис. 7.6). Программа загружается в ПК с подключаемого к нему пульта программирования. Программируемые контроллеры могут работать совместно с ЭВМ, выполняющей функции обработки данных и координации работы ПК. Дальнейшее развитие и удешевление микроэлектронных устройств ведет к тому, что происходит сближение различных видов локальных подсистем управления по их функциям и возможностям. В специальных промышленных компьютерах на базе микроЭВМ, как и в ПК, предусмотрено до 20 мест для установки устройств преобразования информации. Аналогично построены и ремиконты. Общая тенденция развития современных систем уп- 165 равления — распределение всего комплекса задач по управлению технологическим процессом по множеству подсистем, каждая из которых обладает интеллектуальным ядром в виде мощной мик-роЭВМ со своим набором устройств ввода и вывода информации, обслуживающих свой участок технологического процесса и соединенных в единую сеть с главной ЭВМ. ЭВМ в системах управления Существуют три основные категории ЭВМ: большие универсальные ЭВМ, мини-ЭВМ и микроЭВМ. Принципы их построения одинаковы; отличия заключаются в основном в их мощности и размерах. Все три категории машин можно соединить с устройствами преобразования информации и использовать для ее сбора, обработки и выработки управляющих сигналов. Однако поскольку области применения ЭВМ чрезвычайно разнообразны, производители уделяют основное внимание машинам общего назначения, ориентированным на решение широкого класса задач. Массовость производства снижает их стоимость, а широта применения облегчает и удешевляет обслуживание.
В то же время ЭВМ общего назначения далеко не всегда подходят для решения производственных задач. Дело в том, что они ориентированы на задачи, не привязанные к текущему времени. Все исходные данные вводятся в машину заранее, и программа по ходу вычислений сама определяет, когда их использовать. Большинство решаемых на ЭВМ задач сводятся к поискам результатов сложных вычислений. Если человека, работающего с ЭВМ, интересуют только эти результаты, то он не вмешивается в работу машины до их получения. Для него не важно, сколько времени машина потратит на расчеты. Никакие внешние обстоятельства и события не сказываются на работе ЭВМ в таком режиме (кроме отключения электропитания). Совершенно иначе работает ЭВМ в системе управления технологическим процессом. Через датчики и исполнительные механизмы она соединяется непосредственно с процессом, протекающим в реальном времени. Взаимодействуя с оборудованием, ЭВМ вынуждена работать в темпе, задаваемом ходом ТП, т.е. в режиме реального времени. Действия, выполняемые машиной, часто определяются ситуацией, реально сложившейся в данный момент в процессе, а не оператором или программой. Программы находятся в постоянной готовности к поступлению данных из ТП, которые они тут же начинают обрабатывать, т.е. управляющая ЭВМ «работает» от внешних событий. . • Важно, что реакция машины на сложившуюся ситуацию должна происходить в реальном времени и любые задержки в реали- 166 зации, например, аварийных программ могут быть чреваты материальными и людскими потерями. Поэтому управляющая ЭВМ должна обладать максимальным быстродействием и большой вычислительной мощностью, которые могут потребоваться в любой момент. Способность управляющих ЭВМ оперативно реагировать на события, происходящие в технологическом процессе, обеспечивается так называемым аппаратным прерыванием, когда выполнение текущей программы прерывается, чтобы отреагировать на внешнее событие выполнением специальной программы. После ее завершения машина возвращается к прерванной программе. Прерывание называется аппаратным потому, что оно инициируется аппаратурой, т.е. одним из устройств преобразования информации, обнаружившим выход параметра за предельно допустимое значение. Для приема такой информации в управляющей ЭВМ имеются специальные входы.
В реальных ЭВМ предусмотрено несколько уровней прерывания исходя из требуемой срочности реагирования на выход того или иного параметра за допустимые пределы. Сигнал прерывания более высокого приоритета, т.е. поступивший при отклонении более важного параметра, может прервать выполнение программы, обслуживающей прерывание более низкого приоритета (но не наоборот). Приведем пример. Вы решили приготовить кофе с молоком, поставили посуду с молоком на плиту и занялись размалыванием зерен кофе в кофемолке. Бросив взгляд на плиту, вы увидели, что молоко вот-вот «сбежит», и в это время раздается звонок в дверь. Какова будет последовательность ваших действий? Очевидно, процесс размалывания зерен придется прервать, но это не так важно — его можно будет возобновить позже. Что касается сбегающего молока и звонка в дверь, вам придется оценить приоритет каждого из этих факторов и начать с обслуживания того, которому вы присвоите больший приоритет. Таким образом, размалывая зерна, вы получили два сигнала прерывания этого процесса. В соответствии с их уровнями приоритета вы сначала, наверное, максимально быстро снимете молоко с плиты, затем уже без спешки откроете дверь вашему гостю, а после этого вернетесь к продолжению прерванного процесса размалывания зерен. Примерно так же реализуются прерывания в управляющей ЭВМ, только в качестве формирователей сигналов прерывания вам послужили ваши глаза и уши, а ЭВМ получает эти сигналы от устройств обработки информации, выданной датчиками технологических параметров. Следовательно, для управления ответственными и сложными технологическими процессами необходимы специализированные 167 ЭВМ, при разработке которых учитываются все указанные ранее факторы, но разработка, производство и обслуживание таких машин обходятся намного дороже.
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-04-14; просмотров: 204; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.140.5 (0.015 с.) |