Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Сопряжение ЭВМ с объектом управления
Все технические средства контроля и управления технологическими процессами, включая ЭВМ, можно разделить по месту их расположения на две основные группы: 1) средства, которые располагаются непосредственно на технологическом оборудовании или рядом с ним; 2) средства, которые размещаются в помещениях службы контроля и управления либо рядом с ними, на удалении от оборудования технологического процесса. К первой группе относятся датчики и исполнительные механизмы, ко второй группе — ЭВМ и электронные устройства преобразования сигналов. Связующим звеном между ними являются переходные устройства. Тем не менее при существующем многообразии технических средств и ЭВМ система контроля и управления технологическим процессом должна представлять собой единый организм, построенный единообразно и функционирующий по общим правилам. Наиболее рациональный путь создания таких систем заключается в использовании стандартных устройств, выпускаемых промышленностью и удовлетворяющих следующим требованиям. 1. Системные требования. Должна быть предусмотрена возможность связи с широкой номенклатурой датчиков (давления от вакуума до 107 Па; температуры от -270 до 3 000 °С; частоты вращения от 10 до 300000 об/мин и т.д.) и исполнительных механизмов (электродвигатели постоянного и переменного тока, электроклапаны, пускатели, электромагниты и реле с напряжением от 12 до 380 В и т.д.). 2. Требования к соединению с ЭВМ. Они связаны с удобством подключения технических средств к ЭВМ, обмена сигналами с ЭВМ, помехозащищенностью каналов связи с ЭВМ и т.д. 3. Конструктивные требования. Они связаны с созданием удобной для эксплуатации конструкции технических средств АСУ. Организация связи технических средств системы контроля и управления с ЭВМ называется сопряжением ЭВМ с технологическим процессом. Перечисленные ранее требования удовлетворяются при использовании магистрально-модульного принципа построения электронных средств АСУ. Согласно этому принципу каждое из электронных устройств (усилители, АЦП, ЦАП, входные и выходные регистры, в том числе силовые устройства для управления исполнительными механизмами) или группа однотипных устройств представляет собой отдельный унифицированный модуль со своими входными и выходными разъемами. Это может быть отдельная плата, включа-гмая в один из свободных слотов (разъемов) промышленного ком-
172 пьютера, или законченный унифицированный блок, располагаемый в унифицированном каркасе (крейте). Все модули (и отдельные платы, и унифицированные блоки) подключаются к единой стандартной магистрали, по которой передаются в ЭВМ преобразованные в двоичные коды данные о параметрах ТП, а от ЭВМ поступают (также в виде двоичных кодов) управляющие сигналы для исполнительных механизмов. Работу всех модулей синхронизирует контроллер, выполненный, как и остальные модули, в едином конструктивном оформлении. Первая магистрально-модульная система САМАС (Computer Application to Measurement And Control — применение компьютера для измерения и управления) была разработана в 70-х гг. XX в. в США. Это была информационно-измерительная система для проведения сложных экспериментальных исследований в области ядерной физики, но затем она стала использоваться в медицине, промышленности и даже в сельском хозяйстве. В России аналогичная система СУММА (Система унифицированных модулей многомашинного анализа) появилась в конце 1970-х гг. в Институте физики высоких энергий (г. Протвино), а уже в 1980-е гг. широко выпускалась в Дубне как магистрально-модульная система «Вектор». Принцип систем «Вектор» и САМАС один и тот же, одинаковы и конструктивные решения, за исключением того, что размеры модулей в системе «Вектор» измеряются в миллиметрах, а в системе САМАС — в дюймах. В обеих системах стандартизованы: • виды модулей (блоков): входные и выходные регистры, усилители, АЦП, ЦАП, коммутаторы, счетчики, измерители давления, температуры, вакуума; • размеры конструктивных элементов: плат, разъемов, каркасов, стоек; • источники питания: напряжения +5, -5, +12, -12, +24, -24 В постоянного тока, 220 В переменного тока частотой 50 Гц; • параметры сигналов от датчиков: ток — от 0 до 5 или до 20 мА, напряжение — от 0 до 10В; • электрические схемы соединений;
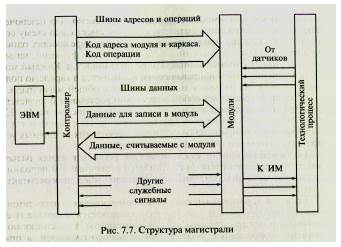
• правила обмена данными между устройствами. [Основной конструктивный элемент обеих систем — стойка, в которой размещается до трех каркасов с модулями и источниками питания. В каждом каркасе устанавливается до 25 модулей одиночной ширины (20 мм для системы «Вектор» и около 2/3 дюйма (17,2 мм) для САМАС) с 90-контактными разъемами на задней панели. В свою очередь, на задней стенке каркаса размещены 25 стандартных 90-контактных разъемов, подключенных к магистрали. Магистраль обмена данными между модулями и ЭВМ представляет собой большое количество проводников (в виде отдельных проводов или дорожек печатной платы), соединяющих па- 173 раллельно все одноименные выводы всех разъемов (за исключением разъема источника питания, который имеет свою схему соединений). Группы проводников магистрали, передающих однородные сигналы или выполняющих однородные функции, называются шинами: шины данных, шины питания и т.д. Каждый модуль по специальным направляющим вставляется в каркас до полного соединения разъемов и подключения к общей магистрали. Модуль представляет собой плату с микросхемами и является, как правило, многоканальным устройством (регистры на 16, 32, 64, 128 каналов; измеритель температуры на 16 каналов и т.д.). Возможно размещение на одной плате нескольких различных устройств (например, АЦП, ЦАП, усилитель). На передней панели каждого модуля устанавливаются разъемы, с помощью которых он соединяется с датчиками и исполнительными механизмами. Это, как правило, тоже многоконтактные разъемы. Если для управления технологическим процессом недостаточно того количества модулей, которое размещается в каркасе (т.е. датчиков и исполнительных механизмов много), то в стойку помещают второй каркас с собственным набором модулей, а при необходимости — и третий каркас. Обмен информацией между модулями и ЭВМ обеспечивает единый для всей стойки контроллер. В его состав может входить свой микропроцессор, ведущий сложную обработку сигналов и управляющий очередностью их обработки другими модулями. В первую очередь, обрабатываются аварийные сигналы, затем — сигналы в цепях защиты, далее — быстроизменяющиеся сигналы и т.д. Микропроцессор контроллера выполняет предварительную обработку сигналов и накопление информации от модулей стойки, что ускоряет работу всей системы управления. Контроллер связан магистралью со всеми модулями каркаса. Особенностью магистрали является работа в режиме поочередной передачи информации, т.е. в каждый момент магистраль занята каким-то одним модулем, от которого она получает или которому передает информацию. Именно контроллер определяет, какому из модулей предоставлять магистраль в каждый конкретный момент. Магистраль имеет следующую структуру (рис. 7.7): • шины адресов и операций, по которым передается код допускаемого контроллером к магистрали модуля и условный код совершаемой операции (например, передача данных из устройства № 2 выбранного модуля в ЭВМ); • шины данных, по которым передается в цифровом виде от модулей в ЭВМ информация о технологических параметрах и от ЭВМ в модули коды управляющих сигналов; 174
• шины служебных сигналов, например сигналов прерываний, сигналов аварийных ситуаций, запроса модулем магистрали или
i сигнала готовности модуля к работе и др. В памяти микропроцессора контроллера хранится программа опроса модулей. Например, необходимо получить от одного из •датчиков информацию о значении технологического параметра. Известно, с каким именно модулем соединен выход датчика. Контроллер выводит на шины адресов двоичный код этого модуля, соединяя с источником напряжения те из шин, на которых в соответствии с кодом должен быть логический сигнал 1. Этот двоичный код поступает на все модули, подключенные к магистрали. • Но только в одном модуле дешифратор «опознает» код как свой, разрешая расположенным в этом модуле устройствам выполнить указанную контроллером операцию, например преобразовать сигнал от нужного датчика в двоичный код. Этот же дешифратор разрешает выходным цепям модуля вывести двоичный код результата на шины данных, по которым он поступает для дальнейшего анализа в микропроцессор или ЭВМ. Для управления технологическим оборудованием микропроцессор выдает на шины адресов код модуля, с которым соединен,нужный исполнительный механизм, а на шины данных — двоичный код управляющего сигнала. , Обычно этот код принимает модуль цифроаналогового преобразователя, который и формирует аналоговый управляющий сигнал для исполнительного механизма. 175 Магистрально-модульный принцип организации передачи информации между различными устройствами широко применяется в современных системах контроля и управления технологическими процессами. Контрольные вопросы 1. Что такое командоап парат? Когда он используется? 2. Что такое обратная связь? 3. Опишите работу механического командоаппарата. 4. Приведите пример электронного командоаппарата и опишите его работу. 5. Что такое микропроцессор? 6. Перечислите основные части микропроцессора и их функции. 7. Перечислите основные части микроЭВМ. 8. Что называют шиной? Какие шины и для чего использует микро-ЭВМ? 9. Что такое ремиконт? 10. Каковы функции программируемого контроллера? 11. В чем особенность работы ЭВМ в АСУ ТП? 12. Что такое аппаратное прерывание и зачем оно нужно? 13. Объясните смысл приоритетов сигналов прерывания. 14. Какая разница между машинными языками и языками высокого уровня? 15. К какому языку — машинному или высокого уровня — ближе язык программ для станков с ЧПУ? 16. Зачем в ЭВМ используют мультипрограммный режим? 17. Что называют сопряжением ЭВМ с объектом управления? 18. В чем заключается магистрально-модульный принцип построения электронных средств АСУ? 19. Какие магистрально-модульные системы вы знаете? 20. Какова роль контроллера при использовании магистрально-мо-дульного принципа? 21. Как происходит выбор модуля и передача в него данных по магистрали? ГЛАВА 8 ГИБКИЕ АВТОМАТИЗИРОВАННЫЕ
|
|||||||
|
|
Последнее изменение этой страницы: 2021-04-14; просмотров: 136; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.196.184 (0.016 с.) |