Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Устойчивость систем автоматического регулирования
Любая система автоматического регулирования должна поддерживать регулируемый параметр с максимальной точностью, т.е. с наименьшим отклонением от заданного значения. Это достигается обычно за счет повышения чувствительности устройства сравнения. Однако чрезмерное повышение чувствительности может привести к потере устойчивости системы и возникновению колебаний. Действительно, если в системе регулирования высоты полета самолета чувствительность слишком высока, то даже при незначительных отклонениях самолета от заданной высоты (встретившаяся на земле копна сена) на рулевые органы поступает большой сигнал, вызывающий их отклонение на большой угол. Самолет обладает значительной инерционностью, а значит, продолжает реагировать на этот сигнал и изменять высоту полета, даже если сигнал уже закончился, а может быть, даже изменил свой знак на обратный. В конечном счете это ведет к увеличению амплитуды колебаний высоты полета и потере устойчивости. Устойчивость — это способность системы самостоятельно возвращаться в состояние равновесия после прекращения воздействия, вызвавшего нарушение равновесия. Процесс перехода системы в новое состояние после возмущающего воздействия на нее (или возврата системы к прежнему состоянию после прекращения воздействия) называется переходным процессом. Поведение системы в переходном процессе отражает ее устойчивость. Если при очень малых воздействиях в системе возникают колебания со все возрастающей амплитудой, то такая система является неустойчивой. Система, в которой колебания не возникают или возникающие колебания затухают в процессе ее возврата к состоянию равновесия, считается устойчивой. На самой границе устойчивости в системе могут возникнуть незатухающие колебания с постоянной небольшой амплитудой. Качество регулирования оценивается двумя показателями: наибольшим отклонением Ат.лх регулируемого параметра от требуемого значения во время переходного процесса и временем регулирования tp (длительностью переходного процесса) (рис. 3.9). Время регулирования отсчитывается с момента поступления возмущающего воздействия Xm (t) на вход системы до момента окончания переходного процесса, когда регулируемый параметр ХВЫХ(f)
67 будет отличаться от требуемого значения на очень малую величину (так называемая зона нечувствительности). Характеристики звеньев САР Система автоматического регулирования представляет собой совокупность отдельных элементов и технических средств: датчиков, усилителей, преобразователей, запоминающих устройств, исполнительных механизмов и рабочих органов. В автоматике каждое из них называют звеном и рассматривают с точки зрения их реакции на входное воздействие. Реакция может быть различной. Например, изменение сигнала на входе электронного усилителя, работающего в линейном режиме, приводит к пропорциональному изменению сигнала на его выходе, следовательно, электронный усилитель — пропорциональное звено. Изменение сигнала на входе исполнительного механизма, например электрического двигателя, приводит обычно к плавному изменению частоты вращения до нового значения. Так проявляются инерционные свойства двигателя, следовательно, электрический двигатель — инерционное звено. При этом не имеет значения, какова физическая природа звеньев или их конструктивное исполнение, главное — как изменяется выходная величина А"вых(0 при том или ином воздействии Xm (t) на входе звена. Отношение выходной величины к входной называется передаточной функцией, а характер изменения выходной величины во времени при прямоугольном воздействии на входе звена (переходной процесс) называется переходной характеристикой звена. Если известна переходная характеристика, то можно вычислить реакцию звена на любое входное воздействие и прогнозировать поведение системы. 68
В системах автоматического регулирования различают пять типов звеньев: • пропорциональное; • инерционное; • интегрирующее; • дифференцирующее; • колебательное. В пропорциональном звене выходная величина повторяет без искажений и запаздывания входную величину (рис. 3.10, а). В качестве примеров пропорциональных звеньев можно привести делитель напряжения, состоящий из двух резисторов (напряжение на каждом резисторе в точности повторяет напряжение, поданное на делитель, но меньше его по значению); рычаг (перемещение одного конца рычага повторяет в масштабе перемещение другого его конца).
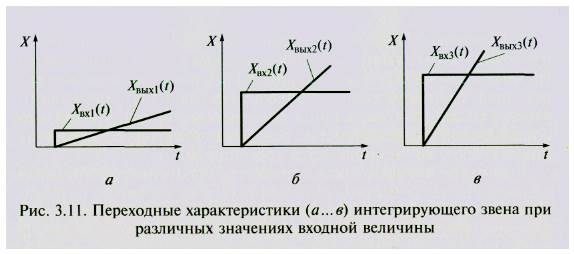
В инерционном звене при скачкообразном изменении входной величины выходная величина стремится к новому установившемуся значению по экспоненциальному закону (рис. 3.10, б). Этот закон выражает инерционность звена, которая приводит к задержке реакции звена на внешнее воздействие. В реальных звеньях инерционность обусловлена наличием в звене большой массы, момента инерции или электрической емкости. Например, чем больше момент инерции ротора двигателя, тем дольше он будет разгоняться до установившейся частоты вращения при подаче на него напряжения питания в качестве входного воздействия. Чем больше емкость конденсатора, тем дольше он будет заряжаться до величины приложенного напряжения. В интегрирующем звене выходная величина пропорциональна интегралу от входной величины. Известно, что интеграл постоянной величины представляет собой линейно (т.е. равномерно) увеличивающуюся или уменьшающуюся величину, причем чем больше входная величина, тем больше скорость изменения выходной величины (рис. 3.11).
Если входная величина мгновенно изменяется от одного постоянного значения до другого, то выходная величина растет или убывает линейно с углом наклона, зависящим от скачка значения входной величины (например, напряжение на конденсаторе в электрической цепи изменяется пропорционально интегралу от тока заряда конденсатора, рассматриваемого как входное воздействие). В дифференцирующем звене выходная величина пропорциональна производной (дифференциалу) от входной величины. Производная от любой величины, изменяющейся с течением времени, равна скорости ее изменения (рис. 3.12, а). Чем больше скорость изменения сигнала на входе, тем больше значение выходной величины. Если входная величина изменяется ступенчато (скачком), т.е. с огромной скоростью, то значение сигнала на выходе теоретически становится бесконечно большим. В действительности существуют различные причины, которые ограничивают и скорость изменения входного сигнала, и максимальное значение выходного сигнала. В качестве примера дифференцирующего звена можно привести ЛС-цепочку (рис. 3.12, б), состоящую из резистора и конденсатора и широко применяющуюся в электронике для получения коротких импульсов.
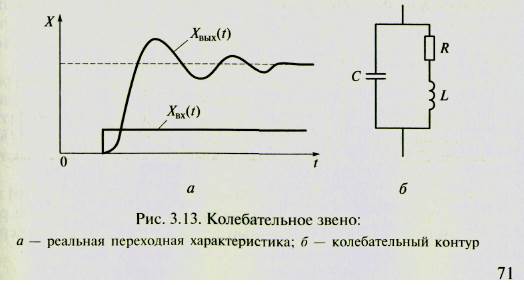
В колебательном звене скачкообразное воздействие на входе приводит к колебаниям выходной величины относительно нового установившегося значения. На рис. 3.13, а показана реальная переходная характеристика, отличающаяся наличием начального участка медленного нарастания выходной величины, что связано с неизбежной инерционностью реальных объектов. Если колебания затухают, то звено является устойчивым. В качестве примера можно привести пружинный амортизатор автомобиля: когда в кузов помещают груз, кузов вместе с грузом проседает и совершает несколько колебаний прежде, чем установится в устойчивое положение. Инерционность звена проявляется в том, что, когда груз касается кузова, в первое мгновение из-за инерции они начинают движение вниз медленно, затем все больше ускоряются под тяжестью груза и одновременно начинают воспринимать действие амортизатора. В качестве примера можно также привести колебательный контур, состоящий из конденсатора С и катушки индуктивности L (рис. 3.13, б). При подаче на эту цепь напряжения в ней возникают колебания, которые затухают тем быстрее, чем больше активное сопротивление катушки R.
Такое разнообразие характеристик звеньев позволяет создавать системы автоматического регулирования с различными воздействиями на рабочие органы технологического процесса в зависимости от вида регулируемого параметра и влияния этого параметра на свойства конечного продукта. При отклонении регулируемого параметра от заданного значения воздействие на рабочий орган организуют по одному из четырех законов регулирования: • интегральный (И-регулятор); • пропорциональный (П-регулятор); • пропорционально-интегральный (ПИ-регулятор); • пропорционально-интегрально-дифференциальный (ПИД-регулятор).
Интегральный регулятор формирует воздействие на рабочий орган, которое линейно возрастает или убывает до тех пор, пока регулируемый параметр не вернется к заданному значению. Эти регуляторы наиболее просты в реализации, но процесс регулирования носит колебательный характер и система может оказаться неустойчивой. Пропорциональный регулятор воздействует на рабочий орган тем сильнее, чем больше отклонение регулируемого параметра от заданного значения. Устойчивость таких регуляторов выше, чем интегральных, но им свойственна так называемая статическая погрешность, т.е. после отработки входного воздействия новое установившееся значение параметра всегда немного отличается от заданного. Пропорционально-интегральный регулятор совмещает оба способа регулирования. Рабочий орган воспринимает суммарное воздействие, поэтому в ПИ-регуляторах достигается высокое быстродействие, обеспечивается устойчивость регулирования и отсутствует статическая погрешность. Именно ПИ-регуляторы широко применяются при автоматизации технологических процессов. В пропорционально-интегрально-дифференциальных регуляторах к воздействию на рабочий орган, формируемому ПИ-регулятором, добавляется составляющая, пропорциональная скорости изменения отклонения регулируемого параметра от заданного значения. Это обеспечивает наибольшую эффективность ПИД-регуляторов, но у них сложная наладка.
Реальные автоматические системы, ведущие технологические процессы, включают в себя системы и автоматического контроля, и автоматического управления, и автоматического регулирования в самых различных сочетаниях и объемах. Обобщенная структурная схема комплекса технических средств автоматической системы приведена на рис. 3.14. Здесь технологический процесс сопровождается: • контролем дискретных параметров (например, «нагреватель включен» или «наполнен седьмой резервуар»), воздействующих на соответствующие датчики (Д), сигналы которых через переходные устройства (ПУ), устройства нормализации сигналов (УНС) и регистры или счетчики поступают на ЭВМ; • контролем аналоговых параметров (например, температуры, уровня, давления, расхода), воспринимаемых аналоговыми датчиками (Д), сигналы которых также через переходные устройства (ПУ), устройства нормализации сигналов (УНС), коммутатор (К), усилитель (У), аналого-цифровой преобразователь (АЦП) поступают также на ЭВМ; • поддержанием отдельных параметров (на схеме — одного) на заданном уровне с помощью регулятора, в котором значение регулируемого параметра с помощью датчика (Д) передается через 72
73 ПУ на регулирующее устройство (РУ), где сравнивается с сигналом от задатчика (3). Выходной сигнал РУ поступает (через ПУ) на исполнительный механизм (ИМ), который воздействует на рабочие органы (РО) таким образом, чтобы при нарушении равновесия вернуть параметр в исходное состояние; • выработкой ЭВМ на основе анализа состояния технологического процесса и технологического оборудования дискретных управляющих воздействий (например, «включить нагреватель № 2» или «открыть клапан № 5»), которые через выходные регистры и ПУ поступают на исполнительные механизмы (например, электромагнитное реле или электромагнит) и приводят в действие дис- кретные РО (например, электронагреватель или пневмоэлектро-клапан); • выработкой ЭВМ на основе анализа состояния технологического процесса и технологического оборудования аналоговых управляющих воздействий (например, «понизить уровень Н2» и «поднять давление Р4»), которые через цифроаналоговый преобразователь (ЦАП) и коммутатор поступают на запоминающие устройства (ЗУ) и далее через
ПУ управляют работой ИМ (например, «включить электродвигатель ЭД2 против часовой стрелки на 1,2 с» и «переместить шток пневмопривода ПП4 на 0,64 мм), которые, в свою очередь, приводят в действие аналоговые РО (например, вентиль В2 и задвижку 34). Оператор получает всю необходимую информацию о протекании технологического процесса и состоянии технологического оборудования (риг. 3.15). Она представляется ему в виде таблиц, графиков, диагра> м и мнемосхем как на экранах дисплеев, так и на бумажных нос елях. Контрольные вопросы
1. Сформулируйте понятие процесса. 2. Что такое технологический процесс? 3. В чем заключается смысл управления? 4. Приведите примеры управляющих воздействий. 5. Сформулируйте понятие сигнала. 6. Какие сигналы и величины называются аналоговыми? 7. Какие сигналы и величины называются дискретными? 8. Сформулируйте понятие исполнительного механизма. 9. Что такое датчик? 10. Что понимается под каналом связи? 11. Перечислите типы автоматических систем. 12. Сформулируйте понятие системы автоматического контроля. 13. Сформулируйте понятие системы автоматического управления. 14. Сформулируйте понятие системы автоматического регулирования. 15. Что понимается под технологическим параметром? 16. Что такое номинальные, регламентные и предельные значения технологического параметра? 17. Перечислите задачи, решаемые системой автоматического контроля. 18. Поясните алгоритм работы системы автоматического контроля. 19. Дайте понятие технических средств системы автоматического контроля. 20. Перечислите технические средства обработки аналоговых сигналов. 21. Перечислите технические средства обработки дискретных сигналов. 22. Каково назначение перечисленных технических средств? 75
23. Поясните алгоритм работы системы автоматического управления. 24. Чем отличается алгоритм управления от алгоритма контроля? 25. Назовите технические средства формирования аналоговых воздействий. 26. Назовите технические средства формирования дискретных воздействий. 27. Какова отличительная особенность системы автоматического регулирования по сравнению с системой автоматического управления? 28. Назовите два основных принципа регулирования. 29. В чем суть принципа регулирования по отклонению? 30. В чем суть принципа регулирования по компенсации? 31. Какие задачи решает адаптивная система? 32. Какие задачи решают следящая и программная системы? 33. Что такое устойчивость системы автоматического регулирования? 34. Дайте понятие звена в системе автоматического регулирования. 35. Что такое переходная характеристика звена? 36. Назовите пять основных типов звеньев. 37. Охарактеризуйте поведение звеньев в переходном режиме. 38. Поясните обобщенную структурную схему комплекса технических средств автоматической системы. ГЛАВА 4 ДАТЧИКИ Мы воспринимаем окружающий мир при помощи органов чувств. Органы зрения, слуха, обоняния преобразуют параметры окружающего мира в сигналы, передаваемые нервной системой головному мозгу — нашему управляющему устройству. Глаза, уши, нос — это наши датчики. Физические явления и процессы, протекающие в них, не всегда нам понятны, но, скорее всего, они преобразуют получаемую извне информацию в электрические сигналы. Датчики тоже преобразуют технологические параметры в электрические сигналы. Чтобы понять, как они это делают, рассмотрим, как вообще можно получить электрическое напряжение. Известно, что разность потенциалов (электрическое напряжение) может возникать: • между концами проводника при его движении в магнитном поле; • на гранях кристалла кварца при действии на него силы; • между свободными концами двух соединенных проводников из различных металлов при нагреве точки их контакта; • между двумя разнородными полупроводниками при освещении зоны их контакта (р— «-перехода) и т.д. Эти и подобные им явления лежат в основе работы датчиков различных параметров технологических процессов: скорости, силы, температуры, освещенности и др.
|
|||||||||
|
|
Последнее изменение этой страницы: 2021-04-14; просмотров: 261; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.135.125 (0.044 с.) |