
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Настройка и инициализация энкодера.
Для синхронных двигателей с абсолютными энкодерами, если физическая связь между валом двигателя и энкодером изменялась (т.е. замена энкодера, проскальзывание энкодера и т.д.) позиция энкодера должна быть определена заново. Есть 2 функции, доступные для определения позиции энкодера в PM двигателях: Статическое Определение Абсолютной Позиции Энкодера (SPI). Процесс SPI может узнать положение энкодера без движения (т.е. с канатами и тормозами), но не определяет, требуется ли изменение фазировки каналов A / B - это будет описываться далее. Динамическое Определение Абсолютной Позиции нкодера (DPI). Эта функция определяет положение энкодера, но требуется движение шкива с минимальным трением (т.е. сбалансированный лифт или без канатов). Преимущество этого метода состоит в том, что надлежащая фазировка каналов А / В может быть определена автоматически. SPI может быть сделано с канатами и тормозами. Для начала функционирования SPI перейдите в LL05 и следуйте инструкциям на LCD дисплее: LL05 - SPI (“Старт”) Пользователю будет предложено: 1. Отключите тормоз 2. Установите скорость ревизии равную 0 3. Пустите лифт в ревизии. После успешного завершения LED 1 мигает зеленым, а LED 2 красным цветом. В процессе SPI, двигатель сделает серию измерений и LCD дисплей будет показывать измерения абсолютной позиции энкодера. Во время настройки девять измерений будут записаны, первое измерение не учитывается, а из восьми оставшихся вычисляется среднее значение. После завершения на дисплее будет отображаться последнее измерение и среднее значение. Положение энкодера, найденое SPI будет записано в параметр LE06. После завершения процесса, пользователю будет предложено провести процедуру Синхронизации Энкодера, установить правильную фазировку каналов A/B энкодера и правильное направление вращения. При ручной подборке правильной фазировки каналов А/В энкодера в параметре LE03 необходимо повторно провести тест энкодера.
Если процесс Синхронизации Энкодера был проведен ранее, пользователь может прервать процесс Синхронизации Энкодера без потери Абсолютной Позиции Энкодера. Восстановите цепи управления тормозом и установите скорость ревизии.
Ручная настройка синхронной безредукторной лебедки с энкодером.
Значение параметра | ||||||
| US: Базовые настройки |
| ||||||
| US02: Система Измерения | 0: м/с | ||||||
| US03: Тип Двигателя | 3: Синхронный без редуктора | ||||||
| US04: Тип Управления | 1: Двоичный код выбора скорости | ||||||
| US06: Ограничение Скорости | 1.00 m/s – установить ограничение скорости m/s в соответствии с ном. скоростью лифта | ||||||
| US05: Загрузка Конфигурации | Провести операцию: 10: Восст. параметров KEB по умолчанию, после загрузки в параметре US05 должно быть сообщение «1: Конфигурация OK» | ||||||
| СН03: Загрузка данных двигателя | Выбрать конфигурацию для данной лебедки. Подтвердить запись в привод нажатием Enter. При отсутствии конфигурации задать параметры вручную (смотрите таблицу далее). | ||||||
| СН03: Загрузка данных двигателя | Выбрать конфигурацию для данной станции управления лифтом (например, УЭЛ). Подтвердить запись в привод нажатием Enter. При отсутствии конфигурации задать параметры вручную (смотрите таблицу далее). | ||||||
| LI: Параметры входов/станция | УЭЛ,УЛ,УКЛ | ||||||
| LI03: Выбор Комбинации Задания Скорости | 3: декодировать с Li16 + D(Дотяг. - Коррекция - Номинальная - Ревизия) | ||||||
| LI04: Вход 1 Функция | 27: Выбор Скорости | ||||||
| LI05: Вход 2 Функция | 27: Выбор Скорости | ||||||
| LI06: Вход 3 Функция | 27: Выбор скорости | ||||||
| LI07: Вход 4 Функция | 0: Нет функции | ||||||
| LI08: Вход 5 Функция | 25: Направление Вверх | ||||||
| LI09: Вход 6 Функция | 26: Направление Вниз | ||||||
| LI11: Вход 8 Функция | 1: Работа с UPS | ||||||
| LI15: Выбор Направления | 0: Входы Вверх и Вниз + Функция по входу направления | ||||||
| LI16: Пользовательские Комбинации Входов | 00400826h
| ||||||
| LI20: Функция Контроля Тормоза | 0: Общий сброс | ||||||
| LM: Параметры двигателя | (для примера была взята лебедка ЕПМ) | ||||||
| LM01: Номинальная Мощность | 7.4 kW |
Данные с шильдика | |||||
| LM02: Номинальная Скорость | 96.0 1/min | ||||||
| LM03: Номинальный Ток | 18.5 A | ||||||
| LM04: Номинальная Частота | 17.6 Hz | ||||||
|
| ||||
| LM05: Номинальное Напряжение | 380 V |
Данные с шильдика | ||
| LM07: Номинальный Момент | 740.0 Nm | |||
|
LE: Параметры энкодера |
| |||
| LE01: Энкодер 1, Интерфейс | 16: Endat | |||
| LE02: Разрешение Энкодера 1 (имп/об) | 2048 INC | |||
| LE03: Энкодер 1, Направление | 0: Без инверсии | |||
| LE12: Энкодер 1, Состояние | 16: Значение системной позиции передается, энкодер и интерфейс исправны | |||
| Значение LE12 | Отображение |
Описание | ||
| 16 | Позиция передается | Значение системной позиции передается, энкодер и интерфейс исправны | ||
| 67 | Нет связи с Энкодером | Неисправность кабеля - Инкрементальный канал | ||
| 68 | Нет связи с Энкодером | Неисправность кабеля - Абсолютный канал | ||
| 69 | Энкодер счетчик импульсов | Большое Системное Отклонение | ||
| 70 | Энкодер 1 разница разрешения | Введеное разрешение не соответствует разрешению энкодера | ||
| 92 | Энкодер форматируется | Энкодер форматируется | ||
| 96 | Обнаружен новый энкодер | Обнаружен новый энкоднер | ||
| 99 | Неопределенные Данные | Память энкодера не отформатирована. Свяжитесь с KEB | ||
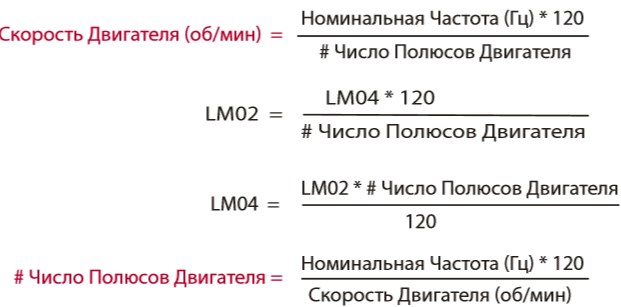 Для синхронных двигателей важно, что соотношение между скоростью двигателя и номинальной частотой соотносится с числом полюсов. Число полюсов должно всегда быть четным числом. Важно проверить следующие отношения! Смотрите рассчитанное Число полюсов в диагностическом Экране #12 для проверки. Если при проверке число пар полюсов получается не целым, то необходимо подобрать параметры LM02 и LM04 (немного увеличив значения LM02 и LM04) таким образом, чтобы число пар полюсов двигателя было целым.
Для синхронных двигателей важно, что соотношение между скоростью двигателя и номинальной частотой соотносится с числом полюсов. Число полюсов должно всегда быть четным числом. Важно проверить следующие отношения! Смотрите рассчитанное Число полюсов в диагностическом Экране #12 для проверки. Если при проверке число пар полюсов получается не целым, то необходимо подобрать параметры LM02 и LM04 (немного увеличив значения LM02 и LM04) таким образом, чтобы число пар полюсов двигателя было целым.
| 255 | Нет связи с интерфейсом | Неправильно подключен энкодер или неисправен интерфейс. Это будет отображаться с инкрементальными энкодерами TTL | ||
| LE35: Трансляция Сигналов Энкодера 1 (имп/об) (значение LЕ35 и соответствующий ему коэффициент деления импульсов энкодера) | Для исполнения лифтов без машинного помещения. Результат деления числа импульсов энкодера (за один оборот) на коэффициент деления; это значение надо умножить на два (т.к. полиспаст) | |||
| Значение LE35 | Коэфф. деления | Число импульсов за оборот двигателя | ||
| 96 | 64 | 32 (для скорости 1,0 м/с) | ||
| 112 | 128 | 16 (для скорости 1,6 м/с) | ||
| LN: Параметры лебедки |
| ||
| LN01: Диаметр Канатоведущего Шкива | 400mm |
Из документации на лифт | |
| LN02: Передаточное Отношение Редуктора | 1 | ||
| LN03: Коэффициент Тросовой Подвески | 2 | ||
| LN04: Грузоподъемность Лифта | 400 | ||
| LS: Профиль скорости |
| ||
| LS01: VL Скорость Дотягивания | 0.1-0.13 m/s | ||
| LS02: VN Номинальная Скорость | 1.00 m/s значение равное US.06 | ||
| LS03: VR Скорость Ревизии | 0.2-0.63 m/s | ||
| LS04: VС Скорость Коррекции | 0.1-0.25 m/s | ||
| LS20: Ускорение для VN | 0.701 m/s² |
Значения по умолчанию | |
| LS21: Стартовый Рывок для VN | 0.701 /s³ | ||
| LS22: Рывок в Конце Ускорения для VN | 0.701 /s³ | ||
| LS23: Замедление для VN | 0.701 m/s² | ||
| LS24: Рывок в Начале Замедления для VN | 0.701 /s³ | ||
| LS25: Рывок в Конце Замедления для VN | 0.701 /s³ | ||
| LS20: Ускорение для VN | 0.701 m/s² | ||
| LS21: Стартовый Рывок для VN | 0.701 /s³ | ||
| LS22: Рывок в Конце Ускорения для VN | 0.701 /s³ | ||
| LS53: Замедление для VR | 3.000 m/s² |
Рекомендуемые значения | |
| LS54: Рывок в Начале Замедления для VR | 1.588 /s³ | ||
| LS55: Рывок в Конце Замедления для VR | 1.588/s³ | ||
| LL: Параметры настройки |
| ||
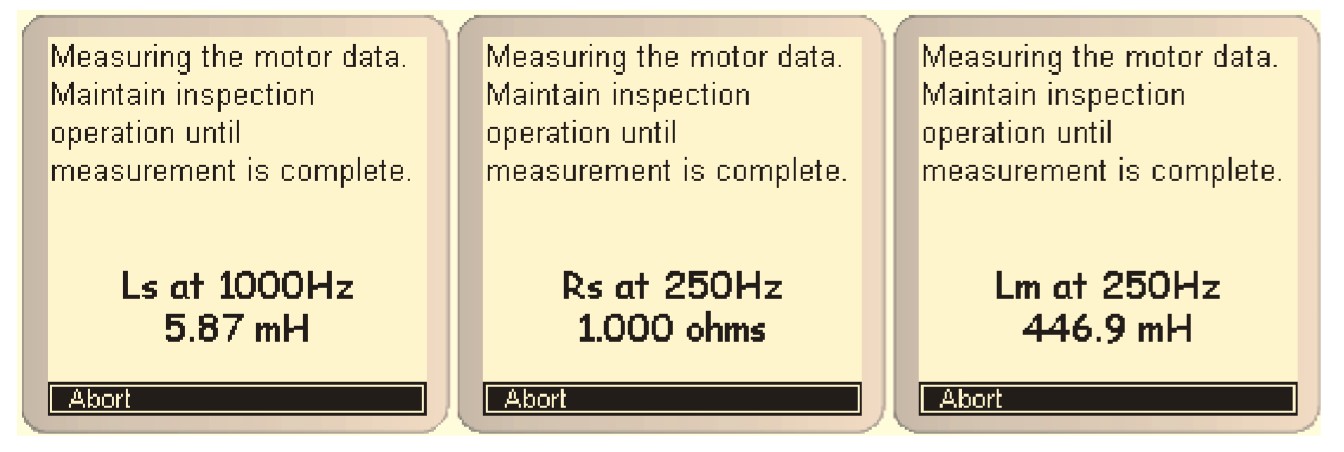
| LL01: Настройка на Двигатель | 1: Старт Произвести тест двигателя, следуя подсказкам на дисплее. | ||
| LL05: Статическое определение абс. поз. энкодера | 1: Старт Произвести статическое определение абсолютной позиции энкодера, следуя подсказкам на дисплее, после данной процедуры рекомендуется отменить предложенную синхронизацию энкодера, а при необходимости инверсии треков А-В, либо инверсии направления движения двигателя использовать для настройки параметр LE03. При изменении данного параметра провести повторно тест Энкодера
| ||
| LE03: Энкодер 1, Направление | 0: Без инверсии 1: Инверсия треков A-B 2: Инверсия направления вращения двигателя 3: Инверсия треков A-B и направл.вращ.двигателя
| ||
| LC: Параметры регулятора скорости | |
| LC01: Конфигурация контроля скорости | 2: Замкнутый контур |
| LC03: KP Скорости для Ускорения | 1000-3000 |
| LC04: KP Скорости для Замедления | 1000-3000 |
| LC05: KP Скорости Предмомента | 1000-3000 |
| LC08: KI Скорости для Ускорения | 250 |
| LC09: KI Скорости для Замедления | 250 |
| LC10: KI Скорости Предмомента | 3000 Регулировка отката |
| LC11: Усиление KI Скорости для Ускорения | 3000 |
| LC30: Максимальный Момент | 250 % - 300% |
| LT: Параметры таймеров | |
| LT01: Задержка Отпускания Тормоза | 0.05 s |
| LT02: Задержка Старта Скорости | 0.04 s |
| LT03: Время Отпускания Тормоза | 0.70 s |
| LT10: Задержка Наложения Тормоза | 0.10 s |
| LT12: Время Наложения Тормоза | 0.50 s |
| LT13: Время Затухания тока | 0.30 s |
| LO: Выходы/станция | УЭЛ,УЛ,УКЛ |
| LO05: Функция Выхода O1 | . 2: Готовность привода |
| LO10: Функция Выхода O2 | 0: Выкл. |
| LO15: Функция Выхода RLY1 | 10: управление контактором |
| LO20: Функция Выхода RLY2 | 4: Управление тормозом |



