Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Режим электромагнитного тормозаСодержание книги
Поиск на нашем сайте
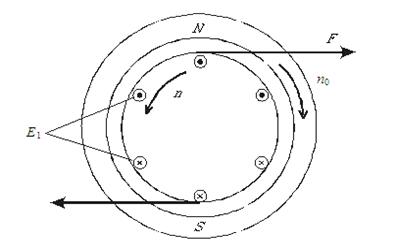
Этот режим работы наступает, если ротор и магнитное поле вращаются в разные стороны. Этот режим работы имеет место при реверсе асинхронного двигателя, когда изменяют порядок чередования фаз, т.е. изменяется направление вращения магнитного поля, а ротор по инерции вращается в прежнем направлении. Согласно рис. 14.12 электромагнитная сила будет создавать тормозной электромагнитный момент, под действием которого будет снижаться частота вращения ротора, а затем произойдет реверс. В режиме электромагнитного тормоза машина потребляет механическую энергию, развивая на валу тормозной момент, и одновременно потребляет из сети электрическую энергию. Вся эта энергия идёт на нагрев машины.
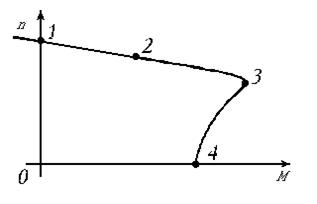
При n = n 0, S = 1. При n → – ∞, S → + ∞. Таким образом, в режиме электромагнитного тормоза скольжение изменяется в пределах: 0 < S < ∞. Механическая характеристика асинхронного двигателя Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного момента n = f (M). Эту характеристику (рис. 14.13) можно получить, используя зависимость M = f (S) и пересчитав частоту вращения ротора при разных значениях скольжения.
Рис. 14. 13
Так как S = (n 0 – n) / n 0, отсюда n = n 0(1 – S). Напомним, что n 0 = (60 f)/ p – частота вращения магнитного поля. Участок 1–3 соответствует устойчивой работе, участок 3–4 – неустойчивой. Точка 1 соответствует идеальному холостому ходу двигателя, когда n = n 0. Точка 2 соответствует номинальному режиму работы двигателя, ее координаты М н и n н. Точка 3 соответствует критическому моменту М кр и критической частоте вращения n кр. Точка 4 соответствует пусковому моменту двигателя М пуск. Механическую характеристику можно рассчитать и построить по паспортным данным. Точка 1: n 0 = (60 f) / p, где р – число пар полюсов машины; f – частота сети. Точка 2 с координатами n н и М н. Номинальная частота вращения n н задается в паспорте. Номинальный момент рассчитывается по формуле: здесь Р н – номинальная мощность (мощность на валу). Точка 3 с координатами М кр n кр. Критический момент рассчитывается по формуле М кр = М н λ. Перегрузочная способность λ задается в паспорте двигателя n кр = n 0 (1 – S кр),
Точка 4 имеет координаты n = 0 и М = М пуск. Пусковой момент вычисляют по формуле М пуск = М н λпуск, где λпуск – кратность пускового момента задается в паспорте. Асинхронные двигатели имеют жесткую механическую характеристику, так как частота вращения ротора (участок 1–3) мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей.
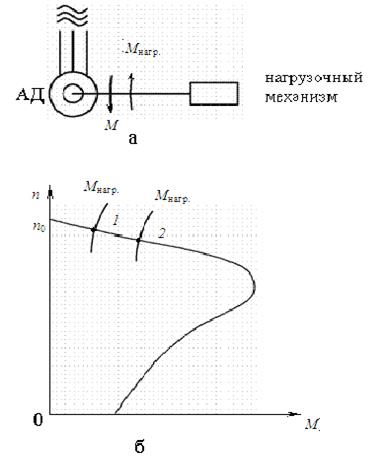
Работа с нагрузкой на валу На рис. 14.14 рассматривается совместная работа асинхронного двигателя с нагрузкой на валу. Нагрузочный механизм (рис. 14.14 а) соединяется с валом двигателя и при вращении создает момент сопротивления (момент нагрузки). При изменении нагрузки на валу автоматически изменяется частота вращения ротора, токи в обмотках ротора и статора и потребляемый из сети ток. Пусть двигатель работал с нагрузкой М нагр 1 в точке 1 (рис. 14.14 б). Если нагрузка на валу увеличится до значения М нагр 2, рабочая точка переместится в точку 2. При этом частота вращения ротора снизится (n 2< n 1), а возрастет вращающий момент (М 2> М 1). Снижение частоты вращения ротора приводит к увеличению скольжения, увеличению токов в обмотках ротора и статора, т.е. к увеличению потребляемого из сети тока.
Рис. 14. 14
|
|||||
|
|
Последнее изменение этой страницы: 2021-04-04; просмотров: 141; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.78.12 (0.007 с.) |

 , 14. 7
, 14. 7 , S н = (n 0 – n н) / n 0 – номинальное скольжение.
, S н = (n 0 – n н) / n 0 – номинальное скольжение.