
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Глава 1 . Тягово-скоростные свойства автомобиляСтр 1 из 12Следующая ⇒
Глава 1. ТЯГОВО-СКОРОСТНЫЕ СВОЙСТВА АВТОМОБИЛЯ
Тягово-скоростными называют совокупность свойств, определяющих возможные по характеристикам двигателя и сцеплению ведущих колес с дорожным покрытием диапазоны изменения скоростей движения автомобиля и его максимальные ускорения разгона. Анализ расчетных показателей тягово-скоростных свойств колесной машины позволяет определять предельные дорожные условия, в которых еще возможно движение автомобиля, а также оценивать возможность буксировки в конкретных дорожных условиях прицепа заданной массы. Решение обратной задачи – задачи синтеза – дает возможность определить конструктивные параметры автомобиля, которые позволят обеспечить заданные скорости движения и ускорения разгона в конкретных дорожных условиях, а также преодоление заданных подъемов и буксировку прицепа заданной массы. Соответственно, решение первой задачи обычно принято называть поверочным тяговым расчетом, а решение второй задачи – проектировочным тяговым расчетом.
Сцепление колеса с опорной поверхностью Максимальное продольное касательное взаимодействие колеса с опорной поверхностью (при отсутствии боковой силы) ограничивается силой сцепления между ними. В качестве оценочного параметра этого взаимодействия используется коэффициент сцепления j, причем для случая продольного касательного взаимодействия этот коэффициент обозначим j х. Его величина определяется из выражения j х = Rx max / Rz. (15) Касательное взаимодействие колеса с опорной поверхностью обуслов- ливается такими факторами: 1. Трением между шиной и поверхностью дороги. 2. Сопротивлением сдвигу поверхности дороги. 3. Глубиной внедрения элементов рисунка протектора шины в поверхность дороги. Первый фактор наиболее существенен для твердых ровных дорожных покрытий, второй и третий – для деформируемых поверхностей дорог. Большое значение имеет также рисунок протектора шины, жесткость его элементов. Интересно, что максимального значения коэффициент сцепления j х достигает
Таблица 1 Значения максимальных коэффициентов сцепления шин С дорожными поверхностями различных типов
В табл. 1 приведены максимальные величины коэффициентов сцепления шин с дорожными покрытиями различных типов. При движении по мокрым дорогам на величину коэффициента продольного сцепления j х сильно влияет степень износа протектора шины. При износе рисунка протектора более чем на 70% коэффициент сцепления таких шин на сухих дорогах снижается на 30-50%, а в условиях мокрых дорог может уменьшиться в два-три раза.
Потери в трансмиссии При движении автомобиля происходит передача мощности от коленчатого вала двигателя на ведущие колеса. При этом она одновременно расходуется на разгон вращающихся деталей двигателя и трансмиссии и на потери в трансмиссии, обусловленные механическим трением в зубчатых передачах, трением сальниковых устройств подшипников и сопротивлением качению их роликов (иголок, шариков), гидравлическими потерями на перебалтывание смазочного масла в картерах трансмиссионных узлов. Соответствующий ситуации мощностной баланс имеет вид Ре - Р j = Р к + Р тр (23)
или Р к = Ре – Р j – Р тр , (23¢) где Р к – мощность, подводимая к ведущим колесам автомобиля; Ре – мощность двигателя, установленного на автомобиле; Р j – мощность, затрачиваемая на разгон вращающихся деталей двигателя и трансмиссии; Р тр – мощность потерь в трансмиссии. Для учета потерь в трансмиссии удобнее пользоваться понятием коэффициент полезного действия (КПД) трансмиссии hтр: hтр = Р к / (Р к + Р тр) = Р к / (Ре – Р j). (24) Тогда hтр Р к + hтр Р тр = Р к, откуда Р тр = Р к (1 - hтр) / hтр. При установившемся движении, когда Р j = 0 и Р к / hтр = Ре, получим Р тр = Ре (1 - hтр). (25) Общепринято, что КПД трансмиссии автомобиля (как и любой другой механической трансмиссии) равен произведению КПД ее последовательно расположенных узлов. Для проектных расчетов рекомендуются следующие ориентировочные значения КПД автомобильных трансмиссионных узлов: коробки передач 0,95 ÷ 0,99 (в зависимости от включенной передачи); раздаточной коробки 0,93 ÷ 0,97; колесной передачи 0,96 ÷ 0,98; карданного шарнира 0,99 ÷ 0,995 (в зависимости от конструкции шарнира и угла передачи); главной передачи 0,92 ÷ 0,97 (меньшее значение для двойной главной передачи). Для более детального определения hтр можно воспользоваться формулой, учитывающей количество зубчатых передач, карданных шарниров и подшипников трансмиссии, через которые передается полная мощность от двигателя на ведущие колеса hтр = 0,98 к · 0,97 l · (0,99 ÷ 0,995) m · (0,995 ÷ 0,998) n · (0,997 ÷ 0,999) р, (26) где 0,98 – КПД цилиндрической шестеренчатой пары; к – число цилиндрических шестеренчатых пар, участвующих в передаче полной мощности Ре на ведущие колеса; 0,97 – КПД конической шестеренчатой пары; l – число конических пар, передающих полную мощность Ре на ведущие колеса; (0,99 ÷ 0,995) – КПД карданного шарнира; m – число карданных шарниров, передающих полную мощность Ре ; (0,995 ÷ 0,998) – КПД конического подшипника с сальником (без него); n – число конических подшипников, через которые передается полная мощность Ре на ведущие колеса автомобиля; (0,997 ÷ 0,999) – КПД шарикового подшипника с сальником (без него); р – число шарикоподшипников, участвующих в передаче полной мощности Ре на ведущие колеса автомобиля. Примечание: КПД узла (hу), передающего часть (D) мощности Ре, перед подстановкой в формулу (26) лучше откорректировать (hу(кор)) по предлагаемой авторами формуле: hу(кор) = (1 - D) + hу D. При работе на режимах максимальных нагрузок среднее значение КПД трансмиссии для различных типов автомобилей составляет hтр = 0,8 ÷ 0,94. При этом для переднеприводных легковых автомобилей с поперечным распо-ложением двигателя типичны hтр= 0,92 ¸ 0,94, для переднеприводных легковых автомобилей с продольным расположением двигателя hтр= 0,91 ¸ 0,93, для легковых автомобилей классической компоновки hтр= 0,89 ¸ 0,92, для двухосных грузовых автомобилей с одним ведущим мостом hтр = 0,86 ¸ 0,91, для трехосных полноприводных грузовиков hтр = 0,8 ¸ 0,82.
Рис.13. Схема сил, действующих на автомобиль при движении Рис. 14. Распределение давления воздуха по поверхности движущегося легкового автомобиля: + избыточное давление; - разрежение В общем случае действие на автомобиль элементарных аэродина-мических сил в каждой точке поверх-ности автомобиля может быть заме-нено равнодействующей силой Fw, которую можно разложить на состав-ляющие Fwx, Fwy и Fwz поосям системы координат с центром О, совпадающим с центром парусности автомобиля, и осями ОХ, ОУ и О Z, направленными соответственно по продольной, попе-речной и вертикальной осямавто-мобиля (рис. 15). Равнодействующую Fw называют полной аэродинамической силой и опре- деляют с помощью соотношений Fw = cw q A = 0,5 cw rв Ае Vw 2, (46) где с w – безразмерный коэффициент полной аэродинамической силы; q = 0,5rв Vw 2 – скоростной напор, кг/м · с2, равный кинетической энергии 1 м3 воздуха, движущегося со скоростью Vw относительно автомобиля (rв – плотность воздуха, кг/м3); Ае – эффективная площадь действия скоростного напора воздуха на автомобиль, м2.
Полная аэродинамическая сила Fw в общем случае действует на автомобиль на расстоянии В от его центра масс (см. рис. 15), тем самым создавая так называемый полный аэродинамический момент, который с учетом (46) можно записать как
Т w = 0,5 с w rв Ае В Vw 2. (47) Этот момент представляет собой векторную сумму составляющих его моментов Т wx (аэродинамического момента крена), Т wy (аэродинамического опрокидывающего момента) и Т wz (аэродинамического поворачивающего момента), действующих на автомобиль относительно его продольной, поперечной и вертикальной осей, сходящихся в центре масс автомобиля. С точки зрения анализа сопротивления воздуха поступательному движению автомобиля, наибольший интерес представляет действующая в его продольной плоскости составляющая Fwx. Ее величина определяется по аналогии с полной аэродинамической силой по выражению Fwx = 0,5 сх rв Ах Vwx 2, (48) где сх – коэффициент обтекаемости автомобиля (иногда называют коэффи-циентом лобового сопротивления, но это определение не совсем точное); rв – плотность воздуха, кг/м3 (обычно для равнинных условий принимается rв = 1,225 кг/м3); Ах – площадь наибольшего поперечного сечения автомобиля (так называемая «площадь миделя»), м2; Vwx = V а ± V в– скорость продольного воздушного потока относительно автомобиля, где V а – скорость движения автомобиля, м/с; V в – скорость встречного (знак +) или попутного (знак -) ветра, м/с.
Коэффициенты обтекаемости сх определяются путем продувки полно- размерных автомобилей или их масштабных моделей в специальных аэродинамических трубах. Эти замеры относятся к дорогостоящим, поэтому не все модели автомобилей проходят такую продувку. В табл. 3 собраны данные из технической литературы и периодической печати о величинах коэффициентов обтекаемости легковых автомобилей основных мировых производителей.
Таблица 3 Наименование |

|
Уменьшение 
| Снижение расходов топлива, % | ||||||||||||||||||||||||||||||||||||||
| Серийная кабина | 
| 0,86 | - | - | ||||||||||||||||||||||||||||||||||||||
| Серийная кабина с установленным на крыше обтекателем | 
| 0,65 | -24,4 | -7,6 | ||||||||||||||||||||||||||||||||||||||
| Серийная кабина с обтекателем и боковой обтекатель шасси | 
| 0,63 | -27 | -8,2 | ||||||||||||||||||||||||||||||||||||||
| Кабина улучшенной формы, закрытое обтекателями пространство между кабиной и фургоном-полуприцепом |

| 0,48 | -44 | -12,9 | ||||||||||||||||||||||||||||||||||||||
| Теоретическая модель | 
| 0,4 | -53 | -15 |
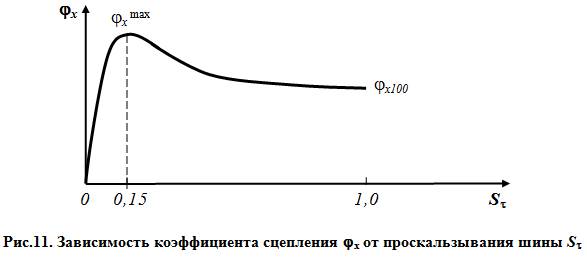
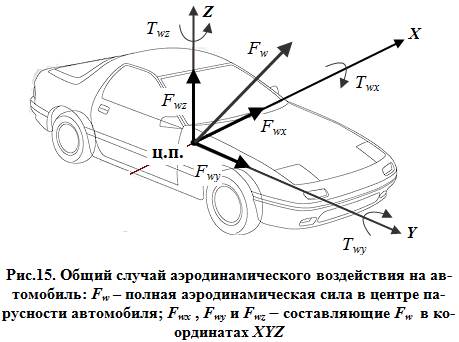
Рис.16. Результаты исследований концерна ИВЕКО по аэродинамике
большегрузного (полная масса 44 т) автопоезда
Интересны результаты аэродинамических исследований автомобильного концерна ИВЕКО, полученные при испытаниях большой модели грузового автопоезда полной массой 44 т, состоящего из тягача и полуприцепа-фургона.
В стандартном варианте (тягач с прямоугольной кабиной и прямо-угольный фургон полуприцепа) получено среднее значение коэффициента обтекаемости 0,86 (рис.16, а). При движении такого автопоезда со скоростью 90 км/ч на ведущие колеса тягача необходимо подводить мощность порядка 215 кВт, т.е., с учетом потерь в трансмиссии и под капотом, мощность двигателя должна быть 260 кВт (354 л.с.). При установке обтекателя на кабину тягача удалось уменьшить сх до 0,65 (рис.16, б), в этом случае при движении с такой же скоростью потребуется подводить на ведущие колеса 197 кВт, соответственно от двигателя потребуются 238 кВт (324 л.с.) мощности, или на 8,5 % меньше. Дальнейшего небольшого улучшения обтекаемости (сх = 0,63) удалось получить при установке на тягаче фартуков-экранов между передними и задними колесами (см. рис.16, в). Наилучший результат (сх = 0,48) был получен при установке новой кабины с сильно наклоненным ветровым стеклом и скругленными кромками (оптимальная величина радиуса скругления 150 мм), а также за счет опускания нижней линии боковины фургона вниз до уровня нижней кромки кабины и перекрытия пространства между кабиной и полуприцепом-фургоном гибкими обтекателями (рис.16, г). У такого автопоезда при скорости движения 90 км/ч потребуется подводить на ведущие колеса только 183 кВт, соответственно двигатель должен будет развивать мощность около 221 кВт (300,5 л.с.), т.е. уже на 15% меньше, чем в исходном варианте. Экономия расхода топлива составит 5-6 л на 100 км пробега [9].
|
|
 |
| |
Рис.17. Опытный образец грузового автомобиля-фургона «Фусо МТ-90 Х»
(коэффициент обтекаемости сх = 0,38; колесная формула 6х4;
грузоподъемность 11 т; двигатель – дизель; максимальная мощность
двигателя 260 кВт; максимальная скорость автомобиля 100 км/ч)
Видно, что в этом случае дизайнеры постарались использовать все ре- комендации, вытекающие из аэродинамических исследований. Передок маши- ны имеет максимально скругленные боковые части, ветровое стекло стоит под углом 30о к вертикали, обеспечен плавный переход от него к крыше кабины, которая без уступа переходит в крышу грузового фургона (точно так же, без уступа, боковины кабины переходит в боковины фургона). Обеспечен минимальный зазор между задней стенкой кабины и передней стенкой фургона. Развитый передний спойлер ограничивает прохождение воздушного потока снизу автомобиля, уменьшая дополнительное сопротивление от выступающих деталей подвесок и узлов трансмиссии. Этой же цели служит применение сзади односкатных колес. Не забыты и такие «мелочи», как обтекаемые колпаки колес, убирающиеся при движении подножки кабины, боковые аэродинамические фартуки-экраны (см. рис.17).
Накопленный опыт отечественных и зарубежных аэродинамических ис- следований грузовых автомобилей позволяет сделать ряд рекомендаций по совершенствованию формы этих обычно угловатых из-за специфики грузовых платформ транспортных средств. Как уже отмечалось ранее, прежде всего надо заниматься правильным оформлением с точки зрения аэродинамики передней части автомобиля (включая кабину). Этот вывод лишний раз подтвердила «ГАЗель» (ГАЗ-3302), плавные, почти каплеобразные очертания передка кабины которой в сочетании с тем, что борта кузова практически не выступают за ее габариты, обеспечили получение хорошей обтекаемости (сх = 0,52-0,55 в зависимости от оснащения грузовой платформы). Возможно дальнейшее уменьшение сх «ГАЗели», оснащенной тентом грузовой платформы, за счет небольшого обтекателя на крыше кабины. Еще лучший результат получится, если есть возможность опустить переднюю кромку тента до уровня крыши кабины и обеспечить постепенное снижение высоты его расположения по мере приближения к заднему борту кузова, имитируя кривизну идеально обтекаемой капли (снижение на длине кузова «ГАЗели» ГАЗ-3302 должно быть в пределах 0,3-0,4 м, на длине кузова ГАЗ-3307 – примерно 0,5-0,6 м) [9]. 
У грузовиков, имеющих относительно узкие кабины и сильно высту- пающие за ее габариты борта грузовой платформы, положительный эффект дадут соответствующие обтекатели на боковых панелях кабины (снижение величины сх при этом составит 4-7 %). Заметное улучшение аэродинамических качеств происходит, если закрывать пустой или частично загруженный кузов, натягивая плотный брезент или тентовую ткань сверху на борта, так как задний борт при незаполненном кузове становится мощным воздушным тормозом. В такой ситуации возможно получить снижение сх на 5-14% [9]. Еще лучше, если передний борт грузовой платформы выполнить по форме, показанной на рис.18. Тогда закрепленный на бортах брезент сформирует некоторое подобие верхней части идеально обтекаемого тела. При этом очень важным в обоих случаях является следующее обстоятельство – крепление брезента на переднем борту не должно допустить задувания внутрь потоков воздуха. Как вариант, исключающий действие заднего борта незаполненного кузова в роли воздушного тормоза, можно предложить конструкторам подумать о разработке решетчатой или другой воздухопроницаемой конструкции этого элемента грузовой платформы.
|
На рис.19 представлены возможные варианты аэродинамических уст-ройств для автомобилей-тягачей и оптимизаторы форм грузовых фургонов, которые рекомендуются для использования при совершенствовании аэродина-мики грузовых прицепных и седельных автопоездов (устройства и откорректи-рованные формы выделены черным цветом). Исследования показывают, что комплексное применение таких элементов коррекции аэродинамики формы автопоезда снижает его суммарное сопротивление обтеканию встречными воздушными потоками на 30-40% [ 10 ].
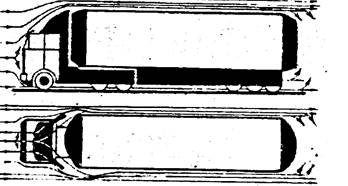
Рис.20. Силы и моменты, действующие на автомобиль-тягач
при прямолинейном ускоренном движении на подъем
Всю совокупность силовых факторов в рассматриваемой ситуации можно разделить на такие основные группы:
1) движущие автомобиль;
2) создающие сопротивление движению;
3) нормальные к направлению движения.
Первую группу силовых факторов представляет окружная сила на ведущих колесах, условно реализованная на рис.20 в виде суммарной продольной реакции дороги S Rx 2 на колеса задней оси.
Вторую группу представляют: Fwx – cила сопротивления воздуха; F a - продольная составляющая силы тяжести автомобиля; Fjx – cила сопротивления поступательному разгону автомобиля; F c x – продольная сила на сцепном устройстве; S Rx 1 – суммарная продольная реакция дороги на колеса передней ведомой оси; S Tf 1 и S Т f 2 – cуммарные моменты сопротивления качению колес соответственно передней и задней осей; S Т j 1 и S Т j 2 – суммарные инерционные моменты колес передней и задней осей.
Третью группу представляют такие вертикальные силы: S Rz 1 и S Rz 2 – суммарные вертикальные реакции дороги на колеса соответственно передней и задней осей; G н = Ga сosa- нормальная составляющая силы тяжести автомобиля; Fwz – нормальная к плоскости дороги составляющая полной аэродинамической силы; F c z – вертикальная нагрузка на сцепном устройстве.
Нормальные реакции опорной поверхности. Для нахождения нормаль- ных реакций дороги на колеса передней (S R z1) и задней (S R z2)осей используются уравнения моментов относительно опорных точек О 1 и О 2 (см. рис. 20). Считаем, что автомобиль не теряет контакта с дорогой, поэтому суммы моментов относительно указанных опорных точек равны нулю:
S T о 2 = 0;
S Rz 1 l – G н b + Fwz bw + S Tf 1 + S Tf 2 + S Tj 1 + S Tj 2 + (F a + Fjx) hg + Fwxh w + F c x h c + F c z b c= 0;
S Т о 1 = 0;
- S Rz 2 l + G н а – Fwzaw + S Т f 1 + S Tf 2 + S Tj 1 + S Tj 2 +(F a+ Fjx) hg + Fwxhw + F c x h c+ F c z (l + b c) = 0.
Отсюда после небольших упрощений (подставим S Т f 1 + S Tf 2 = S Т f и S Т j 1 + S Tj 2 = = S Tj) получим величины нормальных осевых реакций
S Rz 1 = [ G н b – Fwz bw - S Tf - S Tj – (F a + Fjx) hg – Fwx hw - F c x h c – F c z b c ] / l
(54)
S Rz 2 = [ G н а – Fwz aw + S Tf + S Tj +(F a+ Fj) hg + Fwx hw + F c x h c + F c z (l + b c)] / l
(55) Частные случаи:
1. Одиночный автомобиль движется в гору с постоянной скоростью. (Cилой Fwz ввиду ее малости при скоростях движения, меньших 100 км/ч, пренебрегаем).
S Rz 1 = (G н b - S Т f - F a hg – Fwx hw) / l =
= (Ga сosa b – Ga сosa f r д – Ga sina hg – W в Va 2 hw) / l @
@ [ Ga (b – f r д - a hg) – W в Va 2 hw ] / l.
По аналогии (если a < 7-8о)
S Rz2 @ [ Ga (a + f r д + a hg) + W в Va 2 hw ] / l.
2. Одиночный автомобиль на горизонтальной площадке (т.е. статические нормальные реакции на колеса)
S Rz1 cт = Ga b / l = G1;
S Rz2 ст = Ga a / l = G2 .
Вводится понятие коэффициент изменения нормальных реакций mR 1 и mR 2
mR1 = S Rz1 / S Rz1 ст ; mR2 = S Rz2 / S Rz2 ст.
На подъеме и при разгоне mR 1 < 1; mR 2 > 1.
Тяговый баланс автомобиля. Это уравнение, показывающее распределение тяговой силы по видам сопротивления движению и являющееся для представленного на рис. 20 общего случая движения автомобиля уравнением равновесия параллельных опорной поверхности сил. Для суммы всех сил, направленных по оси Х, должно выполняться условие S Fx = 0, т.е.
S Rx 2 - S Rx 1 - F a - Fwx - Fjx - F c x = 0. (56)
Используя ранее выведенное соотношение (9¢¢), можно написать, что
S Rx 2 = T т / r д – f 2 S Rz 2 – (S J к 2 Е к 2 ) / r д.
Из выражения (33) следует, что
Т т = [ Te – (µ e Te + Je) Ee ] u тр hтр,
и соответственно получаем S Rx 2 в развернутом виде
S Rx 2 = Te u тр hтр / r д – (µ е Те + Je) Ee u тр hтр / r д – f 2 S Rz 2 - (S J к 2 Е к 2 ) / r д.
(57)
Для ведомого колеса (см. п. 1.2) можно написать
S Rx 1 = f 1 S Rz 1 + (S J к 1 Е к 1 ) / r д. (58)
Таким образом, после подстановки в уравнение (56) выражений (57) и (58) и раскрывая составляющую Fjx = ma ax, получим
Те u трhтр / r д -(µ е Те + Je) Ее u трhтр / r д– f 2 S Rz 2 -(S J к 2 Е к 2 ) / r д - f 1 S Rz 1 -(S J к 1 Е к 1 ) / r д – - ma ax - F a - Fwx – F c x = 0.
(59)
Для последующих преобразований используем известные зависимости
Е к 1 @ Е к 2 = Е к = ах / r к; Ее = Е к u тр = ах u тр / r к;
f 1 S Rz 1 + f 2 S Rz 2 = f ср G н = f Ga сosa; (60)
(S J к 1 Е к 1 ) / r д + (S J к 2 Е к 2 ) / r д = (S J к Е к) / r д.
Из уравнения (59) соберем вместе все члены, описывающие инерционные свойства элементов системы, причем одновременно заменим в них ряд параметров, воспользовавшись выражениями (60)
ma ax + (µ e Te + Je) Ee u тр hтр / r д + (S J к Е к) / r д =
= ma ax + (µ e Te + Je) ax u тр 2 hтр / r д r к + S J к ах / r д r к = (61)
= ma ax [ 1 + (µ e Te + Je) u тр 2 hтр / r д r к m a + S J к / r д r к m a ] =
= ma ax d j.
В окончательной формуле описания инерционных свойств автомобиля присутствует коэффициент d j, который называется коэффициентом учета вращающихся масс
d j = 1 + (µ e Te + Je) u тр 2 hтр / r д r к ma + S J к / r д r к ma. (62)
Помня, что u тр = u кп u o,введем обозначения
s 1 = (µ е Те + Je) u o 2 hтр / r д r к ma;
s 2 = S J к / r д r к ma.
Получим новую интерпретацию для d j
d j = 1 + s 1 u кп 2 + s 2. (63)
Поскольку, как показали расчеты и исследования, для большинства автомобилей s 1 = 0,03 ¸ 0,05 и s 2 = 0,04 ¸ 0,06 при проектировочных расчетах тягово-скоростных свойств вновь создаваемых автомобилей использование выражения (63) значительно упрощает эту процедуру.
Окончательно уравнение (59) после подстановки в него выражений (40), (45), (49), (50),(60) и (61) приобретает вид
Те u тр hтр / r д – ma ax d j - f Ga сosa - Ga sina - 0,5 сх rв Ах Vwx 2 – F c x = 0 (64)
или
d j ma ax = Te u тр hтр / r д - y Ga – W в Vwx 2 - F c x . (65)
Необходимые условия обеспечения движения автомобиля. Из уравнений (64) и (65) следует, что предельным состоянием cистемы, при котором ее движение с постоянной скоростью еще продолжается, является ах = dVa / dt = 0.
1. Условие движения по преодолению сил сопротивления
Те u тр hтр / r д³ y Ga + W в Vwx 2 + F c x .
2. Условие движения по сцеплению ведущих колес с дорогой
y Ga + W в Vwx 2 + F c x £ T е u тр hтр / r д £ S Rz 2 j х
1.10. Построение тяговой характеристики автомобиля
Тяговой характеристикой автомобиля называется графическое изобра- жение уравнения тягового баланса в координатах тяговая сила F т (F к) – скорость автомобиля V а. Левая часть уравнения тягового баланса включает в себя движущую автомобиль тяговую силу на колесах F т, а правая часть- все силы сопротивления его движению(Ff, F a, Fwx, Fjx, F c x )
F т = Ff + F a + Fwx + Fjx + F c x . (66)
В развернутом виде это уравнение, согласно выражению (65), может быть представлено как
Те u тр hтр / r д = f Ga сosa + Ga sina + W в Vwx 2 + d j m a ax + F c x .
Его левую часть можно представить еще более подробно, если выразить передаточное число трансмиссии через ее составляющие (u тр = u кп u дк u o, где u дк - передаточное число дополнительной коробки)
F т = Те u кп u дк u o hтр / r д. (67)
Из соотношения (67) видно, что для получения всего многообразия значений тяговой силы на колесах F т при построении тяговой характеристики автомобиля необходимо располагать предварительно полученной по замерам на испытательном стенде или построенной теоретическим путем (см. п. 1.4) внешней скоростной характеристикой его двигателя, знать коэффициент коррекции стендовых характеристик k c и коэффициент учета подкапотных потерь k п. Поскольку тяговая характеристика строится для всех ступеней коробки передач и на высшей передаче дополнительной коробки (если она имеется в трансмиссии), а также при наибольшем общем передаточном числе трансмиссии, необходимо знать передаточные числа коробки передач u кп, дополнительной коробки u дк и главной передачи u о. Кроме того, необходимо иметь данные по КПД трансмиссии hтр или уметь его определить расчетным путем, а также определить динамический радиус колес r дведущей оси автомобиля.
Для привязки полученных при расчетах значений F т к



