Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные виды самонастраивающихся систем. Поисковые и беспоисковые системы.Содержание книги
Поиск на нашем сайте
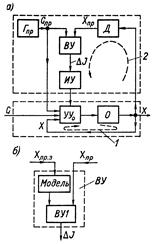
Основное распространение получили самонастраивающиеся САУ такого типа для стабилизации динамических свойств систем. Критериями качества при этом являются различные косвенные критерии качества переходных процессов (корневые, частотные, интегральные), статистический критерий точности в виде среднеквадратичного отклонения и непосредственно динамические характеристики объекта, т. е. его частотные и переходные характеристики. Виды самонастраивающихся систем: Со стабилизацией качества управления: В названных системах адаптация заключается в стабилизации заданного значения критерия качества J путем изменения настройки основного управляющего устройства УУо (см. рис. 20.1). Это осуществляется с помощью настроечных параметров, которые при ручной настройке должны устанавливаться человеком, а в данном случае изменяются автоматически специальным исполнительным устройством, входящим в состав управляющего устройства адаптации УУа. Основное распространение получили самонастраивающиеся САУ такого типа для стабилизации динамических свойств систем. Критериями качества при этом являются различные косвенные критерии качества переходных процессов (корневые, частотные, интегральные), статистический критерий точности в виде среднеквадратичного отклонения и непосредственно динамические характеристики объекта, т. е. его частотные и переходные характеристики. Самонастраивающиеся системы с оптимизацией качества управления На рис. 20.2, а показана функциональная схема САУ со стабилизацией динамических свойств. Штриховыми линиями обведены основная САУ и управляющее устройство адаптации.
Рис. 20.2. Функциональная схема самонастраивающейся САУ со стабилизацией динамических свойств С оптимизацией качества управления Эти системы называются еще экстремальными самонастраивающимися САУ. В отличие от рассмотренных выше самонастраивающихся САУ со стабилизацией качества управления задачей самонастройки в этих САУ является поддержание оптимального значения критерия качества управления J. Последний в данном случае может быть назван поэтом критерием оптимальности, как в неадаптированных оптимальных САУ (см. тринадцатую главу). Рассматриваемые самонастраивающиеся САУ, как и вообще все адаптивные САУ с оптимизацией качества управления, отличаются от неадаптивных оптимальных САУ наличием автоматического изменения оператора управления так, чтобы обеспечивалась оптимальность управления, т.е. оптимум выбранного критерия качества управления, при всех изменениях внешних условий и свойств объекта. С оптимизацией динамических режимов: В этих системах целью самонастройки является поддержание путем изменения настройки основной САУ экстремума какого-либо критерия качества, характеризующего динамические свойства системы. Чаще всего таким критерием является показатель качества переходного процесса или точность основной САУ при случайных воздействиях, а настраиваемыми параметрами – параметры корректирующих звеньев. Самонастраивающиеся САУ с оптимизацией статических режимов Эти системы называются еще системами экстремального регулирования. Они являются простейшими самонастраивающимися САУ с оптимизацией качества управления. В них поддерживается оптимальное значение такого критерия, который характеризует работу объекта в статическом режиме, т.е. обеспечивается работа в точке экстремума соответствующей статической характеристики Примером объекта такой системы экстремального регулирования является система автоматической настройки колебательного контура в резонанс
1. Основные понятия и определения ТАУ. Задачи управления. Принципы регулирования. 2. Управление по разомкнутому и замкнутому принципу. Системы комбинированного управления. 3. Системы стабилизации, системы программного управления, следящие системы. 4. Дифференциальные уравнения САУ. Уравнения статики. Линеаризация уравнений. Стандартная форма записи линейных дифференциальных уравнений. 5. Преобразование Лапласа. Основные свойства преобразования Лапласа. 6. Передаточные функции разомкнутой и замкнутой систем, их связь с дифференциальными уравнениями. 7. Переходная и импульсная переходная характеристики системы, их связь с передаточной функцией. 8. Математическое описание САУ в частотной области. Амплитудная и фазовая частотные характеристики САУ. 9. Вещественная и мнимая частотные характеристики САУ, их связь с амплитудной и фазовой частотными характеристиками. 10. Логарифмические частотные характеристики САУ. 11. Типовые звенья САУ. 12. Интегрирующие и апериодические звенья, их частотные и переходные характеристики. 13. Дифференцирующие и форсирующие звенья, их частотные и переходные характеристики. 14. Колебательные и консервативные звенья, их частотные и переходные характеристики. 15. Звено запаздывания, его частотные и переходные характеристики. 16. Уравнения состояния. 17. Основные виды соединений звеньев САУ, их передаточные функции, частотные характеристики. 18. Передаточные функции одноконтурной САУ по управлению и по возмущению. 19. Построение частотных характеристик системы по частотным характеристикам звеньев. 20. Правила построения ЛАХ и ЛФХ последовательно соединенных звеньев. 21. Правила структурных преобразований многоконтурных САУ. 22. Понятие об устойчивости линейных САУ. Необходимое и достаточное условие устойчивости. 23. Критерий устойчивости Рауса-Гурвица. 24. Принцип аргумента. Критерий устойчивости Михайлова. 25. Критерий устойчивости Найквиста. Запасы устойчивости по амплитуде и фазе. 26. Логарифмический частотный критерий устойчивости. Определение по ЛЧХ запасов устойчивости по амплитуде и фазе. 27. Метод Д-разбиения построения границ областей устойчивости. 28. Оценка качества САУ по кривой переходного процесса. 29. Оценка качества САУ на установившихся режимах. Коэффициенты ошибок. Статические и астатические системы. 30. Интегральные оценки качества переходных процессов. 31. Способы включения корректирующих устройств. 32. Виды обратных связей. Охватывание типовых звеньев жесткой, гибкой и изодромной обратными связями. 33. Синтез параметров САУ по минимуму интегральной оценки. 34. Синтез линейных систем по логарифмическим амплитудно-частотным характеристикам. 35. Основные понятия и определения по нелинейным системам. 36. Нелинейные звенья систем управления. Основные характеристики типовых нелинейных звеньев. 37. Основные методы исследования нелинейных САУ. Метод фазовой плоскости. 38. Основные виды фазовых траекторий линейных систем второго порядка. 39. Основные понятия по Ляпунову об устойчивости нелинейных систем. Основные виды устойчивости нелинейных систем. 40. Принципы построения и классификация адаптивных систем. 41. Основные виды самонастраивающихся систем. Поисковые и беспоисковые системы.
|
||||
|
|
Последнее изменение этой страницы: 2021-03-09; просмотров: 326; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.84.128 (0.007 с.) |