Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Соединение ротора с реостатом во время включенияСодержание книги
Поиск на нашем сайте
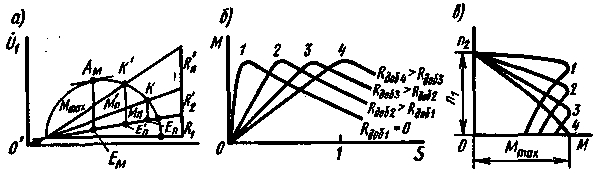
Метод подходит для включения в работы моторов с фазным ротором. Если роторная цепь включает в себя реостат, то активное сопротивление повышается. При этом точка К на рисунке а ниже перемещается ближе к О и обозначается К`. Это не приводит к уменьшению Ммакс, зато обеспечивает повышение Мпуск. Вместе с этим критическое скольжение увеличивается, и зависимость момента от s смещается к зоне больших скольжений. Число же оборотов смещается в зону меньших вращательных частот (рисунки б и в).
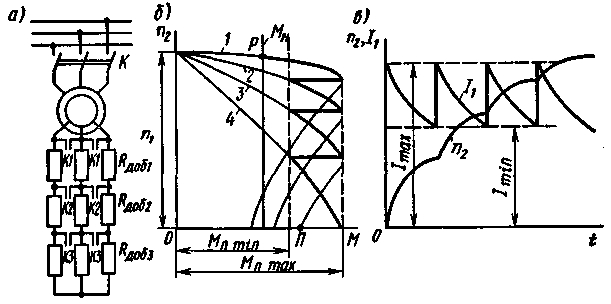
Обычно реостат, используемый для пуска мотора, имеет от 3 до 6 ступеней (смотрите рисунок а ниже). Пусковое сопротивление плавно уменьшается, что обеспечивается большой Мпуск. Изначально мотор приводится в ход по четвертой характеристике, проиллюстрированной на рисунке б. Она соответствует сопротивлению запускающего реостата и обеспечивает максимальную пусковую мощность.
Вращающий момент (Мвр) уменьшается с ростом оборотов. При некотором минимальном значении необходимо отключить часть реостата, чтобы Мвр возрос снова до максимального (смотрите третью характеристику). Но обороты растут, поэтому Мвр снова уменьшается. Тогда отключается еще одна часть реостата, и начинается работа по второй характеристике. Когда реостат двигателя с фазным ротором отключают вовсе, пусковой процесс завершается. Мотор продолжает работу по характеристике 1. Запуск в ход таким методом характеризуется изменением Мвр от максимального до минимального значения. Сопротивление в данном случае уменьшается ступенчато по ломаной кривой линии (выделена жирным на графике). Выключение частей реостата осуществляется автоматически или вручную. Преимущество запуска электродвигателя с фазным ротором с использованием реостата заключается в возможности включать его при Мпуск, близком к Ммакс. Пусковые токи при этом минимальны. Изменение силы тока проиллюстрировано на рисунке в. Недостатков хватает. Во-первых, это сложность включения. Во-вторых, это необходимость использования совсем не дешевых моторов с фазным ротором. Характер работы хуже, чем у аналогов с короткозамкнутым ротором при мощности одинакового значения – это третий минус. Это объясняет, почему электродвигатели с фазным ротором используют преимущественно в случае возникновения сложностей с запуском других двигателей.
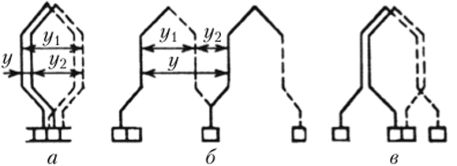
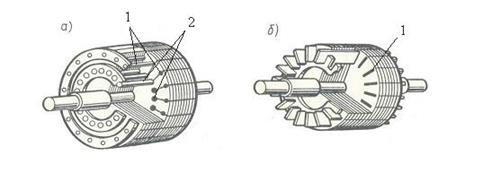
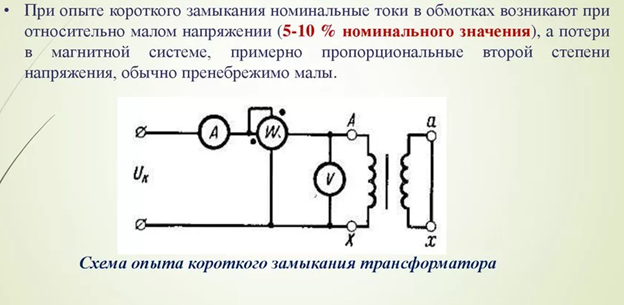
АД с улучшенными пусковыми свойствами Стремление совместить достоинства асинхронных двигателей с короткозамкнутым ротором (высокая надежность) и фазным ротором (большой пусковой момент) привело к созданию этих двигателей. Они имеют короткозамкнутую обмотку ротора специальной конструкцией. Различают двигатели с обмоткой ротора в виде двойной «беличьей клетки» (рис. 5.20а) и с глубоким пазом (рис. 5.20б).
Рис. 5.20 На рис. 5.20 показаны конструкции ротора двигателей с улучшенными пусковыми свойствами. У двигателя с двойной «беличьей клеткой» на роторе закладывается две короткозамкнутые обмотки. Обмотка 1 выполняет роль пусковой, а обмотка 2 является рабочей. Для получения повышенного пускового момента пусковая обмотка должна обладать большим активным сопротивлением, чем рабочая обмотка. Поэтому обмотка 1 выполняется из материала с повышенным удельным сопротивлением (латунь), чем обмотка 2 (медь). Сечение проводников, образующих пусковую обмотку, меньше, чем у рабочей обмотки. За счет этого повышается активное сопротивление пусковой обмотки. Рабочая обмотка, расположенная глубже, охватывается большим магнитным потоком, чем пусковая. Поэтому индуктивное сопротивление рабочей обмотки значительно больше, чем пусковой. За счет этого в момент пуска в ход, когда частота тока ротора имеет наибольшее значение, ток в рабочей обмотке, как следует из закона Ома, будет небольшим и в создании пускового момента будет участвовать в основном пусковая обмотка, имеющая большое активное сопротивление. По мере разгона двигателя частота тока ротора падает, уменьшается и индуктивное сопротивление обмоток ротора, это приводит к увеличению тока в рабочей обмотке, за счет этого в создании вращающего момента будет участвовать, в основном, рабочая обмотка. Т.к. она обладает малым активным сопротивлением, естественная механическая характеристика двигателя будет жесткой. Аналогичная картина наблюдается у двигателя с глубоким пазом (рис. 5.20б). Глубокий стержень обмотки (1) можно представить в виде нескольких проводников, расположенных по высоте паза. За счет высокой частоты тока в обмотке ротора в момент пуска в ход происходит «вытеснение тока к поверхности проводника». За счет этого в создании пускового момента участвует только верхний слой проводников обмотки ротора. Сечение верхнего слоя значительно меньше сечения всего проводника. Поэтому при пуске в ход обмотка ротора обладает повышенным активным сопротивлением, двигатель развивает повышенный пусковой момент. По мере разгона двигателя плотность тока по сечению проводников обмотки ротора выравнивается, сопротивление обмотки ротора снижается.
В целом эти двигатели имеют жесткие механические характеристики, повышенный пусковой момент и меньшую кратность пускового тока, чем двигатели с короткозамкнутым ротором обычной конструкцией. Вопрос 3 Механические электромеханические и рабочие характеристики двигателей с различными способами возбуждения. Механические и рабочие характеристики двигателей постоянного тока Механические характеристики. Uя=(Eя+Iя)(Rя+Rд), (5.35) где R я – активное сопротивление якоря. ω=(Uя-Iя(Rя+Rд))/kФ. (5.36) В соответствии ток якоря I я=M эм./kФ и выражение (5.36) преобразуется в уравнение механической характеристики: ω=Uя/ kФ – (Rя+ Rд)/(kФ)2)Mэм.. (5.37) Это уравнение можно представить в виде ω= ω о.ид.- Δ ω, где ωо.ид.=Uя/kФ (5.38) ω о.ид - угловая скорость идеального холостого хода (при Iя=0 и, соответственно, Мэм.=0); Δω= Мэм.[(Rя+Rд)/(kФ)2]– уменьшение угловой скорости, обусловленное нагрузкой на валу двигателя и пропорциональное сопротивлению якорной цепи.
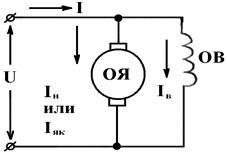
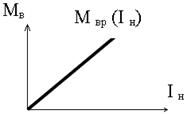
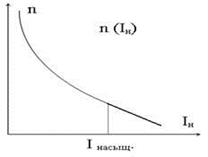
15. Электромеханические характеристики электродвигателей постоянного тока. В зависимости от способа подачи напряжения на обмотку возбуждения и обмотку якоря электрические машины постоянного тока делятся на: 1. генераторы (двигатели) с независимым возбуждением; 2. генераторы (двигатели) с самовозбуждением. В зависимости от способа соединения обмотки якоря и обмотки возбуждения электрические машины с самовозбуждением делятся на: 1. генераторы (двигатели) с параллельным возбуждением; 2. генераторы (двигатели) с последовательным возбуждением; 3. генераторы (двигатели) смешанного возбуждения, имеют две обмотки возбуждения. Электромеханические характеристики снимаются на электродвигателе - одна величина электрическая (Iн), другая- механическая (n или Мвр). Электромеханические характеристики – это скоростная электромеханическая характеристика зависимости частоты вращения якоря от тока нагрузки n(Iн) и характеристика зависимости вращающего момента от тока нагрузки Мвр(Iн). Электромеханические характеристики снимаются при неизменном подаваемом напряжении.
15.1. Электродвигателя с параллельным возбуждением.
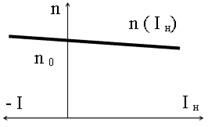
При уменьшении нагрузки частота вращения якоря увеличивается, противо Э.Д.С. возрастает и при какой-то n0 величина наводимой в обмотке якоря Э.Д.С. сравнивается с приложенным напряжением.
Электромеханические характеристики для двигателя с независимым возбудителем, имеют внешний вид, подобный электромеханическим характеристикам двигателя с параллельным возбуждением из-за Ф = Const. 15.2.Электродвигателя с последовательным возбудителем. Ток нагрузки равен току якоря и току возбуждения. При изменении нагрузки будет изменяться ток в обмотке якоря и одновременно в обмотке возбуждения, а, значит, будет изменяться и магнитный поток в соответствии с кривой намагничивания
где w - число витков.
Скоростная электромеханическая характеристика мягкая. При уменьшении нагрузки частота вращения увеличивается, но уменьшается и магнитный поток. Поэтому, наводимая противо Э.Д.С. в обмотке якоря не может преодолеть приложенное напряжение. Электродвигатели с последовательным возбуждением автоматически не переходят в генераторный режим. https://studizba.com/lectures/106-transport/1413-jelektricheskie-zheleznye-dorogi/26056-16-jelektromehanicheskie-harakteristiki-jelektrodvigatelej-postojannogo-toka.html https://studopedia.ru/16_46654_mehanicheskie-i-rabochie-harakteristiki-dvigateley-postoyannogo-toka.html (Половина взята с 2 сайтов)
Механические характеристики электродвигателей переменного тока При рассмотрении работы электропривода, вращающего рабочий орган производственного механизма, необходимо, прежде всего, выявить соответствие механических свойств электродвигателя и производственного механизма. Поэтому для правильного проектирования и экономичной эксплуатации электропривода необходимо изучить и механические характеристики электрических машин, и производственных механизмов. Механическая характеристика электродвигателя определяет зависимость его скорости w от развиваемого им момента М. Часто вместо угловой скорости со используют внесистемную физическую величину - частоту вращения п, так как эти величины пропорциональны друг другу:
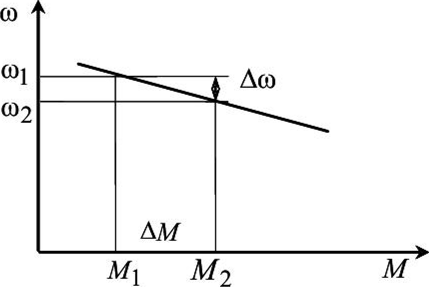
В этом случае механической характеристикой электродвигателя называется зависимость его частоты вращения п от развиваемого им момента М, то есть п = f(M). Степень изменения скорости с изменением момента у различных типов электрических машин неодинакова и различается в зависимости от жесткости механических характеристик (рис. 1.2).
Рис. 1.2. Определение жесткости механической характеристики Под жесткостью механической характеристики к р будем понимать отношение приращения момента ДМ к приращению скорости двигателя Дсо:
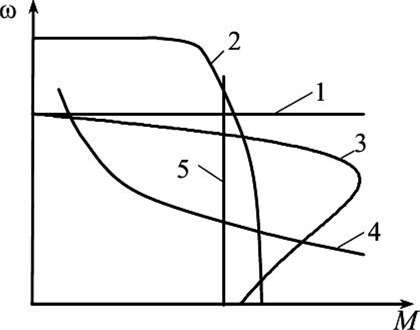
где М,, to, - момент и угловая скорость в первой точке механической характеристики; М„ оо, - момент и угловая скорость во второй точке механической характеристики. Механические характеристики электродвигателей переменного тока можно разделить на четыре основных типа в зависимости от их жесткости:
Рис. 1.3. Механические характеристики электродвигателей • абсолютно мягкая механическая характеристика, при которой момент двигателя остается неизменным с изменением угловой скорости. Из выражения (1.2) следует, что если AM =0, то А:р = 0. Абсолютно мягкой механической характеристикой обладают, например, асинхронные двигатели в моментных электроприводах (зависимость 5 на рис. 1.3). При любом типе механической характеристики электродвигателя вращающий момент двигателя определяется нагрузкой на его валу, то есть моментом сопротивления Мс.
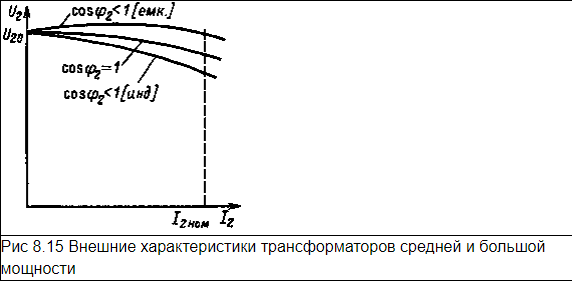
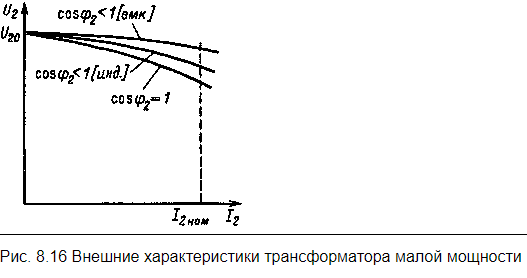
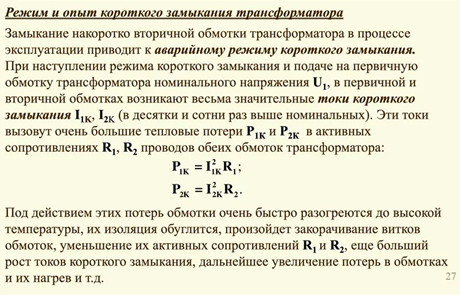
Билет 12 Вопрос 1 Характеристики трансформаторов: внешняя, КПД Внешняя характеристика – это зависимость напряжения на вторичной обмотке трансформатора U2 от тока во вторичной обмотке I2 (U2 = f(I2)), т.е. внешняя характеристика показывает, как изменяется напряжение на выходе трансформатора U2 при увеличении тока нагрузки I2 (при постоянном характере нагрузки и номинальном U1). Как у любого источника, напряжение на вторичной обмотке трансформатора U2 отличается от ЭДС Е2 на величину падения напряжения на внутреннем сопротивлении трансформатора. Из уравнения (3.5)
видно, что U2 линейно зависит от I2 и внутреннего сопротивления трансформатора. Более точный анализ показывает, что на внешнюю характеристику влияет также характер нагрузки, т.е. тип ZH
КПД мощных трансформаторов – очень высокий, (0.98–0.99).
Коэффициентом полезного действия трансформатора называется отношение отдаваемой активной мощности или мощности на выходе к подведенной активной мощности на входе
Коэффициент полезного действия трансформатора зависит, от его загрузки, так как потери в стали постоянны, а потери в обмотках пропорциональны квадрату тока. Если коэффициент нагрузки, к. п. д. трансформатора
Расчеты и опыт показывают, что наибольший к. п. д. у трансформатора будет при коэффициенте нагрузки, когда потери в обмотках равны потерям в магнитопроводе. (https://studfile.net/preview/3166710/page:4/) Вопрос 2 Двигатель с двойной клеткой на роторе Двигатель с двумя клетками на роторе. Обладает значительно лучшими пусковыми характеристиками, чем простой асинхронный двигатель. На рис. изображены: 1 – рабочая клетка, 2 – пусковая клетка. Стержни пусковой клетки обычно выполняют из латуни или бронзы – материалов с более высоким, чем у меди активным сопротивлением. Индуктивное сопротивление рассеяния пусковой клетки не велико, т.к. она расположена вблизи воздушного зазора. Рабочая клетка, выполненная из меди обладает меньшим активным сопротивлением. В момент пуска двигателя ток ротора проходит в основном по верхней (пусковой) клетке, обладающей меньшим индуктивным сопротивлением. Повышенное активное сопротивление этой клетки обеспечивает значительный пусковой момент при пониженном пусковом токе. По мере увеличения частоты вращения ротора уменьшается частота тока в роторе, при этом индуктивное сопротивление клетки уменьшается, происходит перераспределение тока из области пусковой клетки в область рабочей клетки. Т.о. при пуске данного АД происходит постепенное перераспределение пускового момента между клетками.
Вопрос 3 Двигатели постоянного тока. Преобразование электрической энергии в механическую.
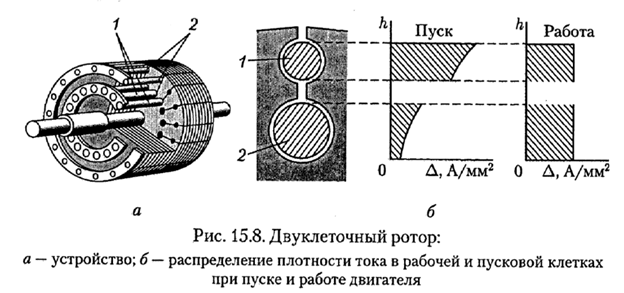
Двигатель постоянного тока — это машина которая преобразует электрическую энергию в механическую. То есть, потребляя для своего вращения электрический ток, она приводит во вращение различные устройства. Это могут быть водяной или воздушный насос, стиральная машина или кофемолка. Электродвигателем постоянного тока, разумеется, такой двигатель называется потому, что для его питания используется постоянный электроток.
Модель двигателя постоянного тока состоит из ротора и статора. Ротор — это подвижная часть двигателя. Статор — неподвижная (статичная) часть. В данном случае статор двигателя является индуктором, а ротор якорем. То есть, ток питания сети протекает в роторе.
(https://zen.yandex.ru/media/ehlektroinform/princip-deistviia-dvigatelia-postoiannogo-toka--pochemu-on-vrascaetsia-5f0b35b490379d39c708321b) Преобразование электрической энергии в механическую энергию.
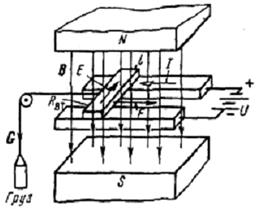
Рис. Модель для пояснения преобразования электрической энергии в механическую. Иллюстрация к закону электромагнитной индукции (а), и закону Ампера (б) К проводнику длиной l, помещенному в магнитное поле, приложено напряжение источника U, и в цепи существует ток I. На проводник действует электромагнитная сила F=BlI, направление которой определяется по правилу левой руки ( находим направление силы по направлению тока и магнитного потока). Под действием этой силы, если F>G, проводник длиной начнет перемещаться и груз станет подниматься. При движении проводника в магнитном поле в нем будет индуцироваться ЭДС E=Blv. Согласно принципу Ленца, направление этой ЭДС противоположно направлению тока. Результатом действия ЭДС будет происходить нагрев проводника. Рэл = Рмех + Рtо
Таким образом, полученная проводником электрическая энергия преобразуется в механическую и тепловую энергию.
Это простейшая модель электрического двигателя: Преобразование электрической энергии в механическую (и обратное преобразование) происходит с помощью магнитного поля. Электрическая энергия, забираемая из питающей сети, запасается в магнитном поле, пронизывающем воздушный зазор. Запасенная магнитная энергия преобразуется в механическую. Когда двигатель совершает механическую работу, такое же количество энергии должно поступать в магнитное поле.
(https://infourok.ru/lekciya-dlya-kolledzha-po-elektrotehnike-na-temu-zakon-elektromagnitnoj-indukcii-preobrazovanie-elektricheskoj-energii-v-mehanic-4425821.html) Билет 13 Вопрос 1 Параллельная работа трансформаторов Параллельной работой двух или нескольких трансформаторов называется работа при параллельном соединении их обмоток как на первичной, так и на вторичной сторонах. При параллельном соединении одноименные клеммы обмоток трансформаторов присоединяют к одному и тому же проводу сети Параллельная работа трансформаторов вместо одного трансформатора суммарной мощности нужна по следующим соображениям: · 1. Для обеспечения бесперебойного энергоснабжения потребителей в случае аварии в каком-либо трансформаторе или отключения его для ремонта. · 2. Обеспечение работы трансформаторов с высокими эксплуатационными показателями (КПД и cos^), варьируя количество работающих трансформаторов, чтобы каждый из них был нагружен оптимально. Для того, чтобы нагрузка между параллельно работающими однофазными трансформаторами распределялась пропорционально их номинальным мощностям, нужно выполнить следующих три условия: · 1. Первичные и вторичные напряжения трансформаторов должны быть соответственно равны, т. е. трансформаторы должны иметь равные коэффициенты трансформации - к2 - к3 - · 2. Трансформаторы должны иметь одну и ту же группу соединения обмоток. · 3. Номинальные напряжения короткого замыкания трансформаторов должны быть равными ((/К1 = UK2 -UK3 =...).
Вопрос 2 Образование ЭДС в обмотках. Электромагнитный момент машины постоянного тока(1.3 тот же вопрос но разобран женей)
Рис. 1.67. Наведение ЭДС в витке Электродвижущая сила в витке может наводиться при вращении витка в магнитном поле или при перемещении магнитного ноля относительно витка (рис. 1.67, а). Электродвижущая сила в витке наводится также, если неподвижный виток пронизывается изменяющимся во времени магнитным потоком (рис. 1.67, б). В общем случае ЭДС в витке наводится при пространственном перемещении поля и витка относительно друг друга, а также при изменении потока, сцепленного с витком, во времени. Электродвижущая сила, обусловленная относительным перемещением витка и поля, называется ЭДС вращения. Электродвижущую силу, зависящую от изменения потока во времени, называют трансформаторной ЭДС. Электродвижущую силу вращения можно определить по формуле, предложенной Фарадеем (см. рис. 1.67, а):
где /§ — активная длина витка; v — линейная скорость. Электродвижущая сила секции (катушки), состоящей из нескольких витков,
где потокосцепление
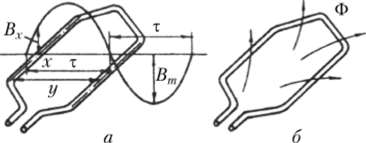
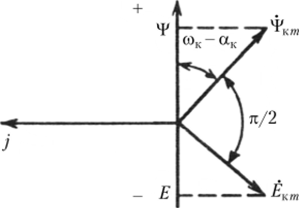
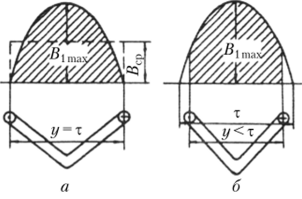
Рис. 1.68. ЭДС и потокосцепления на комплексной плоскости Здесь Ч/кт — максимальное потокосцепление катушки (рис. 1.68). На комплексной плоскости потокосцепления и ЭД.С изображены векторами Фкш и Ёкт. Проекции этих векторов на действительную ось соответствуют мгновенным значениям потоко- сцеплений и ЭДС. Электродвижущая сила, которая наводится в катушке, зависит от выполнения катушки. В катушке, состоящей из витков с диаметральным шагом (рис. 1.69, а), максимальный поток от 1-й гармоники индукции равен
Рис. 1.69. К определению ЭДС в катушке с диаметральным (а) и укороченным (б) шагами Электродвижущая сила катушки
Действующее значение ЭДС катушки
где Вт — амплитуда индукции первой гармоники; 5 = /йт — площадь, пронизываемая потоком. Тогда ЭДС проводника
где амплитуда ЭДС
Так как
то
Для катушки с витками, имеющими укорочение (рис. 1.69, б),
где ky — коэффициент укорочения, который учитывает уменьшение ЭДС за счет укорочения шага витков катушки. Электромагнитный момент машины постоянного тока На проводник обмотки якоря, находящийся в магнитном поле, действует электромагнитная сила
где
Сила, действующая на все проводники
С учетом последних формул получим средний электромагнитный момент сил, действующих на якорь:
+где Электромагнитный момент МПТ прямо пропорционален магнитному потоку полюсов и току якоря. Это справедливо как для двигателя, так и для генератора. Преобразование механической энергии в электрическую и электрическую в механическую сопровождается потерями энергии. Один из основных энергетических показателей МПТ – их КПД
Ссылка на источник: https://studme.org/275677/tehnika/navedenie_obmotkah_elektricheskih_mashin https://studfile.net/preview/2140448/page:12/
Вопрос 3 Обмотки машин постоянного тока.(23.3 такой же вопрос) Обмотки якорей машин постоянного тока делятся на простые и сложные. Обмотки, как правило, двухслойные, симметричные. Простые обмотки выполняются петлевыми и волновыми. Сложные состоят из двух-трех простых петлевых или волновых обмоток. Сложная обмотка, объединяющая простую петлевую и волновую обмотки, называется лягушечьей. В многообразных конструкциях машин постоянного тока встречаются и другие разновидности обмоток, но классификация, приведенная выше, охватывает основные виды обмоток машин постоянного тока. Следует иметь в виду, что основные соотношения в математических моделях процессов преобразования энергии практически не зависят от типа обмотки якоря. На рис. 5.14, а —в представлены секции петлевой, волновой и лягушечьей обмоток. Секции обмотки образуют катушки, которые укладываются в пазы (см. рис. 1.50). Катушка имеет общую пазовую изоляцию и состоит из одной или нескольких секций. Секция состоит из одного или нескольких витков, виток — из двух или нескольких проводников. Секции образуют обмотку, которая может состоять из двух или нескольких параллельных ветвей. Каждая ветвь
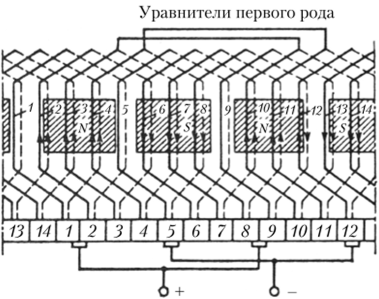
Рис. 5. 14. Секции обмоток машин постоянного тока имеет последовательно соединенные витки и проводники. Последовательно соединенные витки определяют напряжение, а параллельные ветви — ток машины. Общий объем меди при определенной плотности тока характеризует мощность машины постоянного тока. Число элементарных пазов якоря совпадает с числом секций обмотки якоря и равно числу коллекторных пластин К. В простой петлевой обмотке число параллельных ветвей 2 а = 2 р, в рассматриваемом случае равно 4. Число щеток равно числу полюсов. В двухслойной обмотке одна сторона секции лежит на дне паза, а другая — в верхней части паза. Это хорошо видно па схеме рис. 5.16, которая иллюстрирует расположение секций в пазах якоря. При наличии параллельных ветвей из-за несиммстрии воздушного зазора могут возникать уравнительные токи.
Рис. 5.15. Простая петлевая обмотка (z3 = k= 14, 2 р = 4, г/, = 4, у2 = 3)
Рис. 5.16. Схема расположения секций в пазах для обмотки рис. 5.15 Эти токи, замыкаясь через щетки одной полярности, могут ухудшить коммутацию машины. Чтобы уравнительные токи не замыкались через щетки, применяют уравнительные соединения, которые соединяют равнопотенциальные точки обмотки (см. рис. 5.15). Технологически удобно уравнительные соединения выполнять, соединяя проводниками коллекторные пластины. Для удобства на схеме обмотки показано соединение однопотенциальных точек со стороны лобовых частей обмотки, противоположных коллектору. Такие уравнительные соединения называются уравнительными соединениями первого рода. Следует отмстить, что уравнительные токи — токи переменные, так как они замыкаются в обмотке, минуя коллектор. Уравнительные токи создают вращающееся магнитное поле, неподвижное относительно обмотки возбуждения. Поле уравнительных токов уменьшает токи несимметрии, тем самым снижая влияние несимметрии на характеристики машины. Объем меди уравнительных соединений обычно составляет 20^-30% объема якорной обмотки. На схеме обмотки видно, что секции, которые замыкаются щеткой, коммутируются, т.е. переходят из одной параллельной ветви в другую (от одного полюса к другому). Хотя щетки находятся под серединой полюса, коммутация секций происходит между полюсами в зоне коммутации. При волновой обмотке обход якоря заканчивается на коллекторной пластине, находящейся слева или справа от пластины, с которой начиналось построение обмотки. Если при обходе происходит смещение па одну пластину влево (на пластину с меньшим номером), обмотка называется не- перекрещивающейся. В противном случае получается перекрещенная обмотка. Шаг по коллектору простой волновой обмотки с числом коллекторных пластин К определяется как
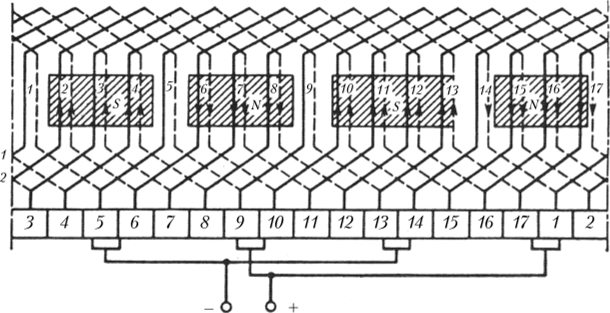
Рис. 5.17. Волновая обмотка (z3 = k = 17, 2 р = 4, г/( = 4, у2 = 4) Знак «-» относится к неперекрещенной обмотке, а «+» — к перекрещенной. Для волновой обмотки, показанной на рис. 5.17, 2 р = 4, z — z3 — k — 17,
Схема простой неперекрещенной волновой обмотки приведена на рис. 5.17. На рис 5.18 показана схема расположения секций в верхней и нижней частях пазов якоря. Число параллельных ветвей в простой волновой обмотке 2а = 2 и не зависит от числа полюсов. Достоинством волновых обмоток является то, что они не требуют уравнительных соединений — сами секции обмотки являются уравнителями, так как стороны секций, соединенных последовательно, находятся на эквипотенциальных образующих цилиндра якоря (см. рис. 5.17).
Рис. 5.18. Расположение секций в пазах простой неперекрещенной волновой обмотки
Рис. 5.19. Расположение секций в пазах сложной петлевой обмотки (z.j - 20, 2р = 4, т = 2) Сложные петлевые обмотки состоят из двух (редко из трех) простых петлевых обмоток. Шаг сложной обмотки у = = ук = 2 (при двух обмотках). Шаги у и у2 определяются так же, как и для простой обмотки. В пропущенные пазы укладывается вторая обмотка сложной петлевой обмотки (рис. 5.19) для 2р = 4, z = za = 20, т = 2 (две простые петлевые обмотки). Для сложной петлевой обмотки у = ук = 2, 2Э 20 У = ^ + 8 = J + 1 = 6, у2 = 6 - 2 - 4.
Ссылка на источник: https://studme.org/231275/tehnika/obmotki_yakorey_mashin_postoyannogo_toka
Билет 14 Вопрос 1 Переходные процессы в трансформаторах. При переходе трансформатора из одного установившегося режима в другой возникают переходные процессы. Так как каждый установившийся режим характеризуется определенным значением энергии электромагнитных полей, то в течение переходного процесса происходит изменение энергии этих полей. Наибольший практический интерес представляют переходные процессы при включении трансформатора и коротком замыкании на зажимах вторичной обмотки.
|
|||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 242; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.65.133 (0.013 с.) |
|||||||||||||||||||||||||||

 При изменении нагрузки (при изменении момента сопротивления) будет изменяться ток только в обмотке якоря, и не будет изменяться в обмотке возбуждения.
При изменении нагрузки (при изменении момента сопротивления) будет изменяться ток только в обмотке якоря, и не будет изменяться в обмотке возбуждения.

 При дальнейшем разгоне Э.Д.С. становится выше приложенного напряжения, ток по обмотке якоря пойдет в другом направлении уже под действием Э.Д.С. – двигатель автоматически перешел в генераторный режим.
При дальнейшем разгоне Э.Д.С. становится выше приложенного напряжения, ток по обмотке якоря пойдет в другом направлении уже под действием Э.Д.С. – двигатель автоматически перешел в генераторный режим.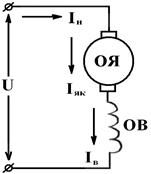
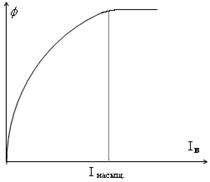



 Зависимость вращающегося момента от тока нагрузки.
Зависимость вращающегося момента от тока нагрузки.
 Скоростная электромеханическая характеристика.
Скоростная электромеханическая характеристика.
 При увеличении нагрузки частота вращения якоря будет уменьшаться из-за увеличения падения напряжения в обмотках двигателя и, в большей степени, из-за увеличения магнитного потока, что вызывает резкое понижение частоты вращения якоря. По мере роста тока нагрузки замедляется рост магнитного потока, а затем наступает магнитное насыщение полюсов (см. выше кривую намагничивания). При дальнейшем увеличении нагрузки магнитный поток остается постоянным, частота вращения якоря понижается только из-за увеличения падения напряжения в обмотках двигателя. Характеристика переходит в прямую линию.
При увеличении нагрузки частота вращения якоря будет уменьшаться из-за увеличения падения напряжения в обмотках двигателя и, в большей степени, из-за увеличения магнитного потока, что вызывает резкое понижение частоты вращения якоря. По мере роста тока нагрузки замедляется рост магнитного потока, а затем наступает магнитное насыщение полюсов (см. выше кривую намагничивания). При дальнейшем увеличении нагрузки магнитный поток остается постоянным, частота вращения якоря понижается только из-за увеличения падения напряжения в обмотках двигателя. Характеристика переходит в прямую линию.

 (3.6)
(3.6)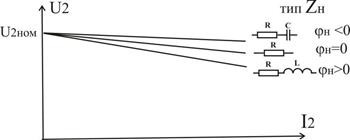







 На комплексной плоскости из формулы (1.79)
На комплексной плоскости из формулы (1.79)





 ,
, – ток проводника, равный току параллельной ветви. Подставив выражения для
– ток проводника, равный току параллельной ветви. Подставив выражения для  и
и  получим
получим .
. .
.
 – коэффициент, определяемый конструкцией машины.
– коэффициент, определяемый конструкцией машины. .
.