
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тема 8. 9. Схема управления электроприводом главного движения продольно-строгального станка по системе тув-дпт.
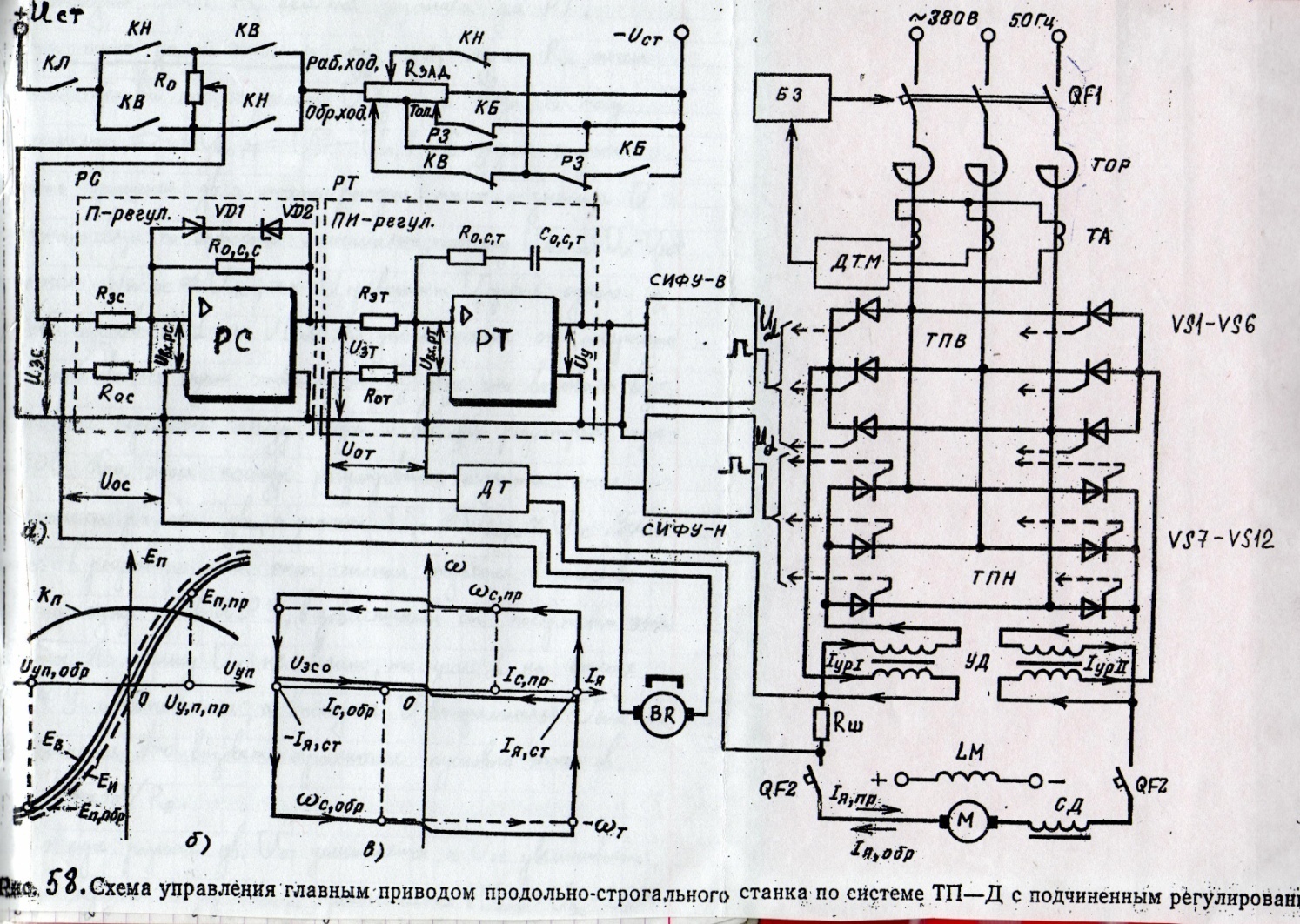
Схема (рис.58) предназначена для автоматического регулирования скорости вращения приводного двигателя стола, а также автоматического ограничения тока двигателя в режиме пуска, торможения и реверса. В автоматическом режиме работа станка осуществляется в функции пути, то есть в функции передвижения стола относительно путевых выключателей ПХВ (ход вперед) и ПХН (ход назад), которые устанавливаются на станине станка (рис.56).
Для ЭП по системе Г-Д используются также путевые выключатели скорости ПС1 и ПС2 (для системы ТУВ-ДПТ не применяются).
Для нормальной работы САР предварительно, в зависимости от длины детали, на столе в нужных положениях расставляются специальные упоры а и б, которые во время движения стола будет воздействовать на путевые выключатели, установленные на станине: упор а – на ПХН, упор б – на ПХВ. Предположим, что стол станка передвигается в направлении рабочего хода и на пониженной скорости В начале обратного хода упор а воздействует на ПХН, возвращая его контакты в прежнее положение (1 – замкнут, 2 – разомкнут). При этом стол на скорости Для лучшего понимания схемы на рис. 58 рассмотрим упрощенную схему на рис. 57 и сравним эти схемы.
Питание тиристорного управляемого выпрямителя (ТУВ), состоящего из двух групп тиристоров (ТВВ – ход стола вперед, ТВН - ход стола назад), осуществляется через токоограничивающий реактор ТОР и автоматический выключатель QF. Выходное напряжение ТУВ через уравнительные дроссели УД и автоматический выключатель QF2, а также сглаживающий дроссель СД, подается на обмотку якоря двигателя М, с валом двигателя механически связан датчик скорости BR (тахогенератор), а в цепь обмотки якоря двигателя включается чувствительный элемент датчика тока ДТ – шунт Rш.
Узел управления пуском, торможением и реверсом двигателя выполнен на линейном контакторе KЛ и контакторах реверса КН и КВ. Контактор KЛ получает питание при нажатии кнопки «Пуск», а контакторы КН и КВ – при коммутации контактов конечных выключателей ПХВ и ПХН (релейно-контакторная часть схемы не рассматривается – Зимин, стр.294). Реверс стола осуществляется путем изменения полярности напряжения задания ± Uзс переключением контактов контакторов КН (назад) и КВ (вперед). Узел задания скорости стола получает питание от источника стабилизированного напряжения ± Uст и выполнен на двух переменных резисторах: а) переменном резисторе Rзад, с верхнего ползунка которого снимается напряжение задания по скорости рабочего хода Vпр , а с левого нижнего ползунка - напряжение задания по скорости обратного хода Vобр (толчковой режим работы не рассматривается). б) переменном резисторе R0, с ползунка которого снимается напряжение задания на пониженную скорость при входе и выходе резца из изделия Vвх и Vвых. Сигнал задания по скорости Напряжением задания по току двигателя
Регуляторы РС и РТ построены на базе операционных усилителей с местной отрицательной обратной связью на элементах Выходное напряжение РС пропорционально входному, а выходное напряжение РТ имеет две составляющие: одна из которых пропорционально входному сигналу, а вторая – интегралу по времени входного сигнала. Данная САР является системой подчиненного регулирования, т.к. выходной сигнал РС является заданием для РТ.
|
||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 400; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.117.165.66 (0.007 с.) |
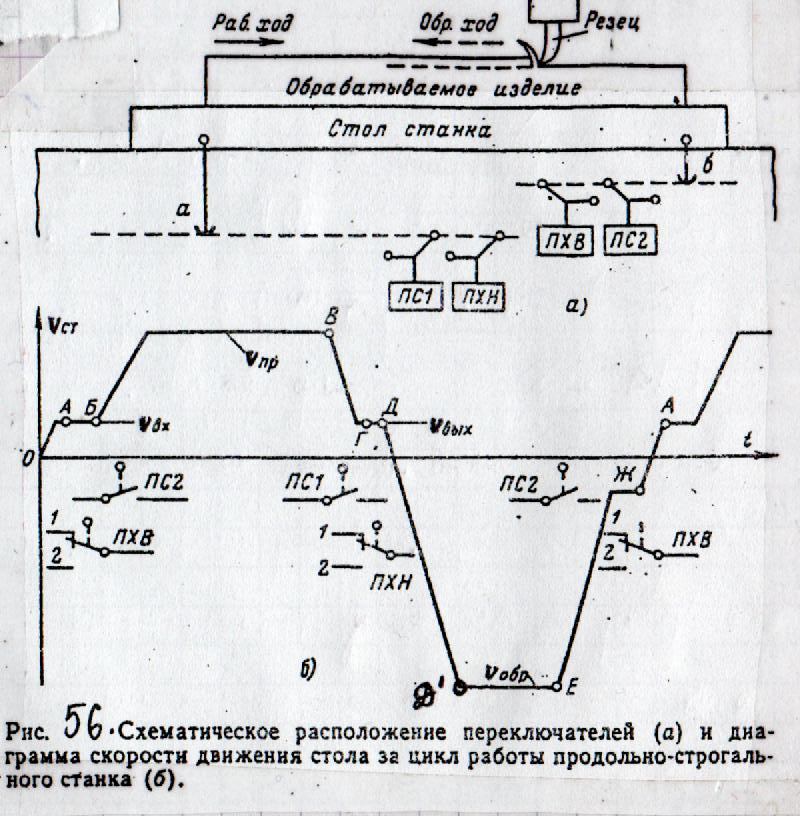
 резец входит в изделие (точка А), а затем упором б переключается ПХВ и его контакт 1 размыкается, а контакт 2 замыкается (точка Б). По этому сигналу угловая скорость двигателя возрастает до заданного значения
резец входит в изделие (точка А), а затем упором б переключается ПХВ и его контакт 1 размыкается, а контакт 2 замыкается (точка Б). По этому сигналу угловая скорость двигателя возрастает до заданного значения  и происходит снятие стружки резцом по всей длине детали (точка Б - В). Перед окончанием рабочего хода упор а переключает ПХН, его контакт 1 размыкается, а контакт 2 замыкается. Скорость стола перед выходом резца из изделия снижается до значения
и происходит снятие стружки резцом по всей длине детали (точка Б - В). Перед окончанием рабочего хода упор а переключает ПХН, его контакт 1 размыкается, а контакт 2 замыкается. Скорость стола перед выходом резца из изделия снижается до значения  (точка В - точка Г). После выхода резца из детали происходит реверс двигателя с прямого хода на обратный (точка Г -точка Д), а затем и его разгон в обратном направлении до скорости
(точка В - точка Г). После выхода резца из детали происходит реверс двигателя с прямого хода на обратный (точка Г -точка Д), а затем и его разгон в обратном направлении до скорости  (точка Д - точка Д').
(точка Д - точка Д').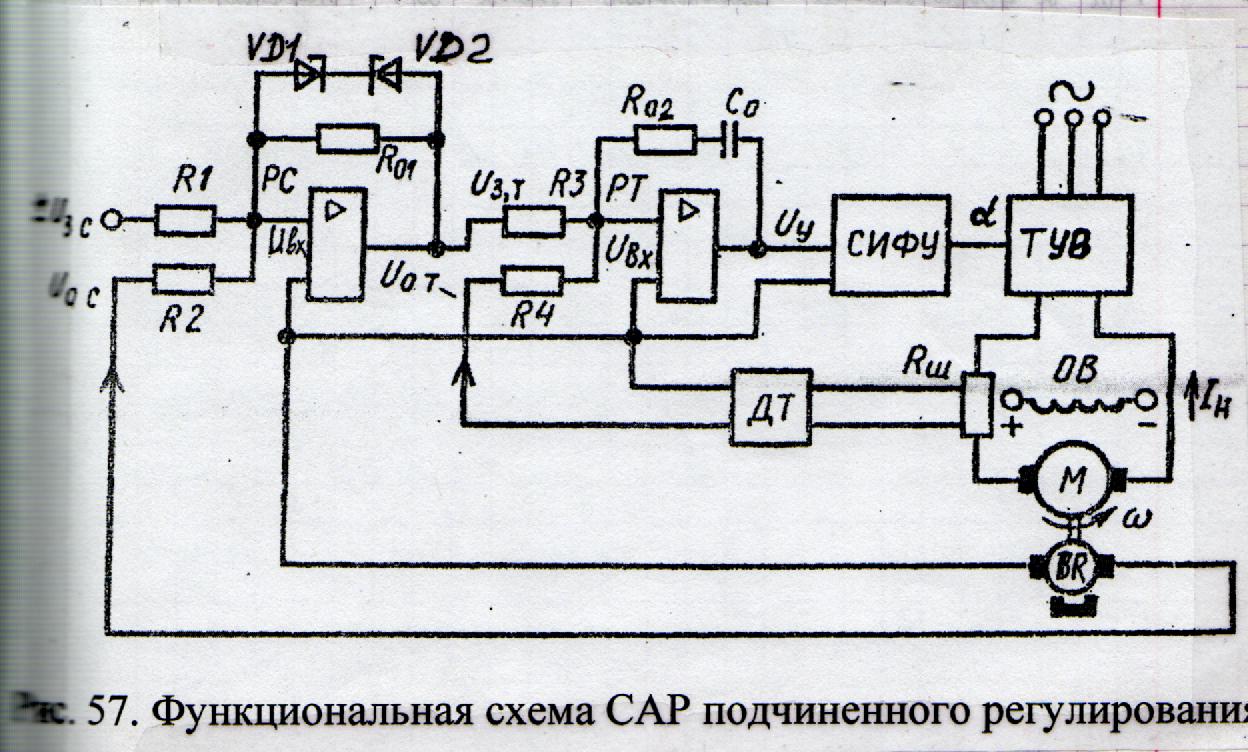
 подается на вход регулятора скорости РС через резистор
подается на вход регулятора скорости РС через резистор  . В эту же точку через резистор
. В эту же точку через резистор  подается напряжение обратной связи по скорости
подается напряжение обратной связи по скорости  , которое снимается с тахогенератора BR. В результате на входе регулятора действует сигнал
, которое снимается с тахогенератора BR. В результате на входе регулятора действует сигнал
 является выходной сигнал регулятора скорости, поступающий на вход РТ через резистор
является выходной сигнал регулятора скорости, поступающий на вход РТ через резистор  . Кроме этого на вход РТ через резистор
. Кроме этого на вход РТ через резистор  поступает сигнал обратной связи по току
поступает сигнал обратной связи по току  . Он снимается с шунта
. Он снимается с шунта  и усиливается датчиком тока ДТ (операционный усилитель постоянного тока). Поэтому на входе регулятора РТ присутствует сигнал
и усиливается датчиком тока ДТ (операционный усилитель постоянного тока). Поэтому на входе регулятора РТ присутствует сигнал .
. и
и  +
+  , поэтому РС представляет собой пропорциональный регулятор (П- регулятор), а РТ – пропорционально-интегральным регулятором (ПИ- регулятор).
, поэтому РС представляет собой пропорциональный регулятор (П- регулятор), а РТ – пропорционально-интегральным регулятором (ПИ- регулятор).


