
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
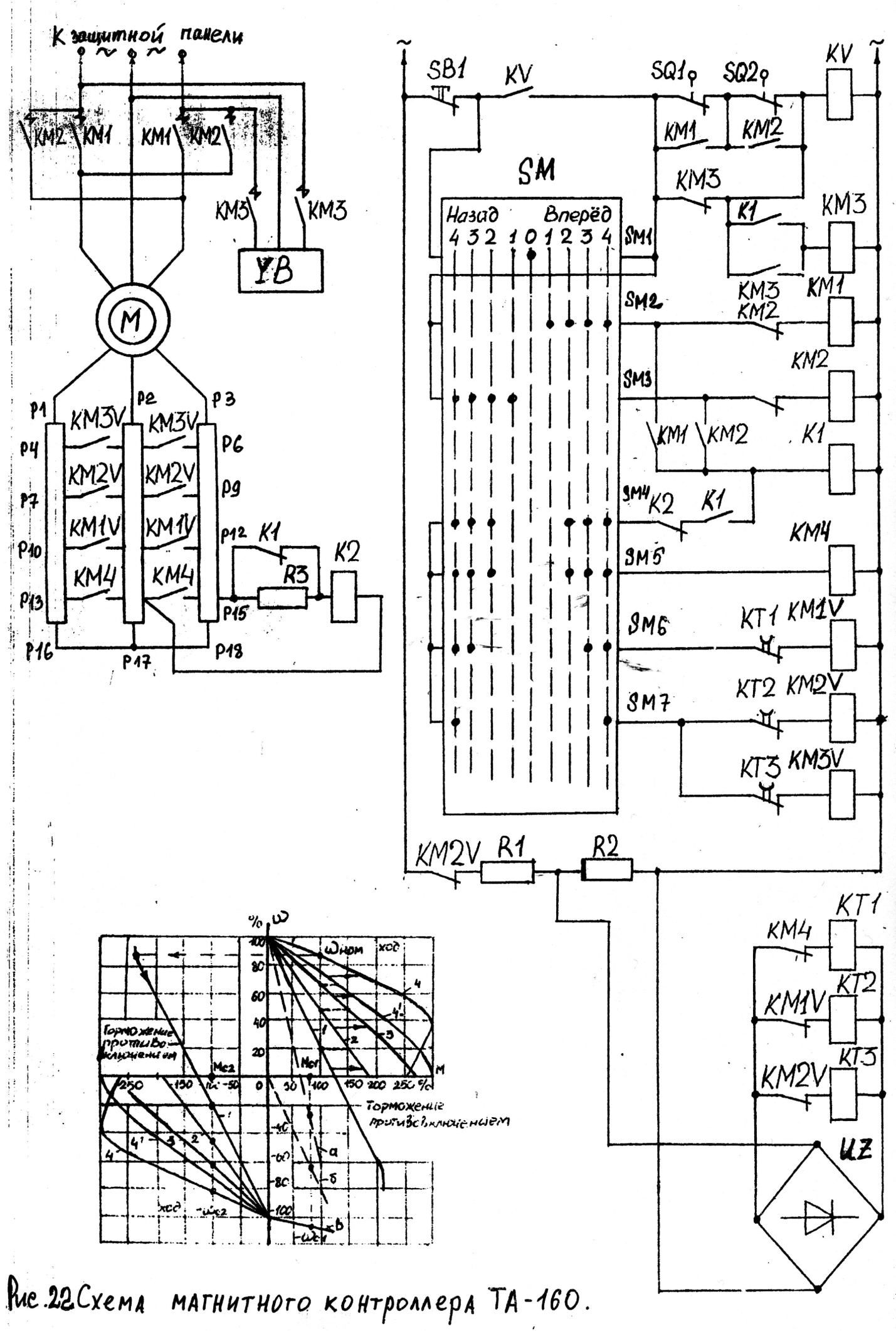
Тема 3. 6. Схема и принцип работы электропривода механизма передвижения с применением магнитного контроллера та-160 или та-250.
Назначение элементов схемы (рис.22): 1. М - асинхронный двигатель с фазным ротором (АДФР); 2. SM- командоконтроллер с контактами SM1÷ SM7; 3. KM1,KM2- контакторы реверса; 4. КМ3- контактор тормоза; 5. КМ4 – контактор регулирования скорости; 6. КМ1V, KM2V, KM3V - контакторы регулирования скорости; 7. KV- реле напряжения; 8. КТ1, КТ2, КТ3- реле времени; 9. К1- блокировочное реле; 10.К2- реле противовключения; 11.YB- катушка электромагнитного тормоза; 12.SQ1, SQ2- конечные выключатели «Вперед», «Назад»; 13.SВ1- копка «Аварийный стоп»; 14.Р1÷ Р16, Р2 ÷ Р17, Р3 ÷ Р18 - ступени ПРР; 15.UZ - двухполупериодный мостовой выпрямитель, питающий реле времени; 16. R1 и R2 - резисторы питания выпрямителя UZ; 17. R3 – ограничивающий резистор.
Принцип работы схемы. Схема подключается к сети через защитную панель (на рис.22 не показана) и позволяет осуществить: - автоматический пуск и выход на естественную характеристику 4 (см. мех. характеристики) электродвигателя М в функции времени; - работу электродвигателя на трех промежуточных скоростях (характеристики 1, 2, 3); - реверс электродвигателя; - торможение электродвигателя противовключением. После включения главного рубильника и линейного контактора в защитной панели в нулевом положении командоконтроллера SM через замкнутый контакт SM1 срабатывает реле КV, становясь на самопитание, и подает напряжение на схему управления (на контакты SM2 и SM3). Одновременно через резисторы R1 и R2 получает питание выпрямитель UZ и реле времени КT1, КT2, КТ3 срабатывают, размыкая свои контакты в цепи питания катушек контакторов КМ1V, KM2V, KM3V. Если сразу перевести рукоятку командоконтроллера из нулевого положения в положение 4В, то схема автоматически будет с выдержкой времени постепенно отключать ступени ПРР, т.к. контроллер автоматизирован в функции времени: 1). В положении 1В замыкается контакт командоконтроллера SM2, после чего последовательно срабатывают контактор КМ1, реле К1, контактор КМ3 (становится на самопитание). Реле К1 размыкает свой контакт в цепи катушки К2, резистор R3 ограничивает ток в ней, поэтому реле К2 не срабатывает. Одновременно через контакты КМ3 получает питание катушка тормоза YB, а через контакты КМ1 – статор двигателя М. Двигатель растормаживается и начинается его разгон по пусковой характеристике 1 с минимальной скоростью при полностью введенных в цепь ротора ПРР.
2). В положении 2В замыкаются контакты командоконтроллера SM4 и SM5, реле К1 становится на самопитание, срабатывает контактор КМ4, отключая своими контактами катушку реле времени КТ1, а также шунтируя ступени ПРР Р13 - Р16, Р14 - Р17, Р15 - Р18 в роторной цепи двигателя. Скорость и ток двигателя увеличиваются и он переходит на механическую характеристику 2. 3). В положении 3В замыкается контакт командоконтроллера SM6, контакт КТ1 с выдержкой времени подает питание на катушку контактора KM1V, а также теряет питание катушка реле времени КТ2. Контактами KM1V из роторной цепи двигателя выводятся ступени Р10 - Р13, Р11 - Р14, Р12 - Р15 и двигатель переходит на механическую характеристику 3. 4). В положении 4В замыкается контакт командоконтроллера SM7, с выдержкой времени замыкается контакт реле времени КТ2 и срабатывает KM2V, своими контактами шунтируя следующую ступень ПРР: Р7 - Р10, Р8 - Р11, Р9 - Р12. Двигатель переходит на следующую характеристику 4', увеличивая свою скорость. 5). Теряет питание выпрямитель UZ (контакт KM2V в цепи резисторов R1 и R2 размыкается), поэтому катушка реле времени КТ3 теряет питание и с выдержкой времени включает контактор KM3V. Он своими контактами выводит из цепи ротора двигателя ступени Р4 - Р7, Р5 - Р8, Р6 - Р9. Двигатель выходит на естественную характеристику 4 с номинальной скоростью ωн , при этом в цепи ротора остаются небольшие невыключаемые ступени ПРР: Р1-Р4, Р2- Р5, Р3 - Р6. Ступенчатое регулирование скорости двигателя в ходе работы крана осуществляется аналогично вышеизложенному. Для торможения противовключением при движении «Вперед» переводят рукоятку командоконтроллера из положения 4В в положение 1Н. При этом КМ1 отключается, а включается КМ2, чередование фаз на статоре изменяется. Теряют питание катушки КМ4, КМ1V, KM2V, KM3V, при переходе через нулевое положение кратковременно отключается реле К1, его контакты шунтируют резистор R3, что приводит к срабатыванию реле К2. Размыкающий контакт К2 осуществляет дополнительную автоматическую блокировку, отключая цепи питания катушек КМ4, КМ1V, KM2V, KM3V в любом из положений «Назад» в режиме торможения противовключением.
Таким образом, обеспечивается торможение противовключением при полностью введеных в цепь ротора ПРР по характеристике 1Н. Скорость двигателя постепенно уменьшается до нуля. При этом оператор должен перевести рукоятку командоконтроллера в нулевое положение, иначе начнется разгон двигателя в направлении «Назад». Пуск и регулирование скорости двигателя из нулевого положения в направлении «Назад» осуществляется аналогично вышеизложенному, с той разницей, что срабатывает КМ2, а не КМ1. Электромагнитный тормоз YB затормаживает вал двигателя в нулевом положении, при нажатии кнопки SB1 или срабатывании конечных выключателей SQ1 или SQ2. Все виды защит осуществляются защитной панелью, а так же реле напряжения KV и конечными выключателями SQ1, SQ2.
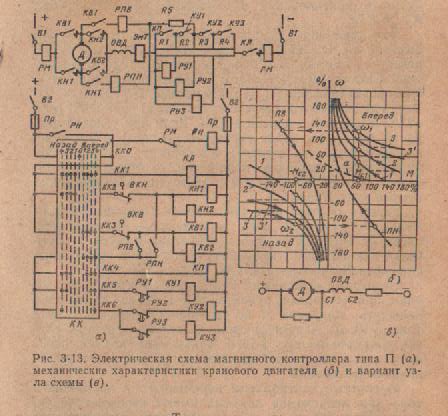
СР Тема 3.7. Схема и принцип работы электропривода механизма передвижения с применением магнитного контроллера П160 (П250). На рис 3-13,а показана принципиальная электрическая схема магнитного контроллера типа П для управления двигателем постоянного тока последовательного возбуждения, а на рис. 3-13,б —механические характеристики двигателя. Такие контроллеры применяются на механизмах передвижения кранов и имеют симметричную схему. В цепь якоря двигателя включены: обмотка возбуждения ОВД, катушка тормозного электромагнита ЭмТ, и четыре ступени сопротивления R1-R4, предназначенные для пуска, торможения и регулирования угловой скорости. Реверсирование двигателя осуществляется переключением контакторов КВ1, КВ2 и КН1, КН2, изменяющих полярность напряжения на якоре. Схема контроллера обеспечивает работу двигателя в двигательном режиме, и в режиме противовключения. Пуск двигателя автоматизируется с помощью реле времени РУ1— РУЗ, которые срабатывают, когда в положениях 1 (Вперед и Назад) командоконтроллера КК по цепи якоря начинает проходить ток. Отключаются реле в результате шунтирования их катушек контактами КП, КУ1и КУ2. При движении механизма Назад (или Вперед) для быстрой его остановки или реверсирования следует перевести рукоятку КК в положение 2, 3 или 4 Вперед (или соответственно Назад). Происходит торможение противовключением по характеристике ПВ (или ПН). Этот процесс контролируется с помощью реле РПВ (или РПН). Если при угловой скорости, близкой к нулю, перевести рукоятку КК в нулевое положение, то двигатель остановится, а если рукоятку оставить в прежнем положения, то будет осуществляться автоматический пуск двигателя в противоположном направлении. Защита силовой цепи достигается с помощью максимального реле РМ, цепи управления — предохранителями Пр. Реле РН служит для нулевой защиты. Отключение механизма в предельных положениях производится конечными выключателями ВКВ и ВКН. Некоторые исполнения контроллеров серии П позволяют при установке рукоятки КК в первое положения включить двигатель Д по потенциометрической схеме (рис. 3-13, в). Характеристика двигателя а в этом случае показана на рис. 3-13,б. Таким способом обеспечиваются условия точной остановки не полностью загруженного механизма. Магнитные контроллеры переменного и постоянного тока для механизмов подъема имеют несимметричную схему. При работе на подъем характеристики двигателя мало отличаются от приведенных на рис. 3-13,б. В режимах спуска груза, асинхронный двигатель включается для работы в тормозном режиме по однофазной схеме питания, в режиме противовключения либо в генераторном режиме (см. характеристики а, б на рис. 3-12,б), как это имеет место в контроллерах типа КС. В контроллерах типа ПС для получения жестких характеристик
|
||||||
|
|
Последнее изменение этой страницы: 2021-02-07; просмотров: 934; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.141.244.153 (0.006 с.) |
 при спуске якорь двигателя и обмотка возбуждения включаются параллельно потенциометрической схеме (см. рис. 3-11,а) с различными соотношениями сопротивлений во всех цепях. Такая схема включения двигателя крана обычно называется схемой «безопасного спуска».
при спуске якорь двигателя и обмотка возбуждения включаются параллельно потенциометрической схеме (см. рис. 3-11,а) с различными соотношениями сопротивлений во всех цепях. Такая схема включения двигателя крана обычно называется схемой «безопасного спуска».


