
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основы теории автоматического управленияСодержание книги Поиск на нашем сайте СОЦИАЛЬНО-ЭКОНОМИЧЕСКИЙ ИНСТИТУТ кафедра информатики и вычислительной техники Основы теории автоматического управления
Методические указания по самостоятельной работе студентов направления подготовки Информатика и вычислительная техника Степень выпускника: бакалавр
Киров 2014 Рассмотрено на заседании кафедры информатики и вычислительной техники, протокол № 1 от 9 сентября 2014 г.
Утверждено на заседании учебно-методического совета, протокол № 87 от 20 октября 2014 г.
Основы теории автоматического управления: Методические указания / Сост. А.И. Стариков. – Киров: ВСЭИ, 2014. – 32 с.
Методические указания разработаны в соответствии с учебной программой дисциплины и предназначены для студентов, обучающихся по направлению подготовки 09.03.01 (230100.62) Информатика и вычислительная техника (степень выпускника: бакалавр)
© Вятский социально-экономический институт (ВСЭИ), 2014 1. Цели и задачи контрольной работы Цель контрольной работы: изучение основных положений теории автоматического управления, получение навыков решения задач анализа и синтеза систем автоматического управления. Задачи контрольной работы: 1. Освоение основных положений теории автоматического управления. 2. Получение навыков определения передаточной функции по структурной схеме и характеристикам отдельных звеньев. 3. Изучение теории и получение навыков расчета характеристик принципиальных электрических схем. 4. Изучение программы моделирования САУ SamSim и изучение с ее помощью характеристик звеньев и структур САУ. 5. Изучение принципов использования ЭАМ в САУ.
2. Требования к результатам контрольной работы
В результате выполнения контрольной работы студент должен: Знать: - основные положения теории автоматического управления; - типовые звенья и системы автоматического управления; - основные характеристики управляющих систем; - методы и критерии оценки характеристик систем автоматического управления; - принципы использования ЭВМ в управляющих системах Уметь: - использовать полученные теоретические знания в практической деятельности; - использовать математические методы для анализа характеристик систем автоматического управления; - использовать специализированные прикладные программы для анализа характеристик систем автоматического управления; - моделировать работу систем автоматического управления с известной структурой. Владеть: - современным математическим аппаратом при решении разноплановых задач, связанных с системами автоматического управления; - прикладным программным обеспечением соответствующего направления.
3. Объем самостоятельной работы студента Самостоятельная работа студента составляет 2 зачетные единицы по очной форме обучения, 3 зачетные единицы по заочной форме обучения. Выполнение контрольной работы предполагает самостоятельную работу студента по разделам № 2,3,4 учебной программы.
4. Варианты контрольной работы
Вариант 8 1. Дайте определение понятия наблюдаемости системы. Приведите примеры с использованием этого понятия. 2. Для приведенной структурной схемы представить передаточную функцию. Описать процесс получения результата.
3. Для приведенной электрической принципиальной схемы выполните следующие действия: · Составить дифференциальное уравнение электрической цепи · Определить переходную функцию и построить ее график · Определить передаточную функцию, используя преобразование Лаплпса · Определить и построить амплитудную частотную характеристику цепи · Определить и построить фазовую частотную характеристику цепи · Сделать вывод об устойчивости схемы
Типовой пример расчета приводится в Приложении 1.
4. Изучить особенности работы программы SamSim и выполнить задания, предписанные в методических положениях Приложения 2. 5. Составить структурную схему с использованием ЭВМ для автоматического поддержания заданного угла отклонения закрылков самолета при изменении нагрузки и поясните принцип ее действия.
5. Выполнение и оформление контрольной работы Контрольная работа состоит из 10 вариантов, по 5 заданий в каждом. Выбор варианта осуществляется по последней цифре номера зачетной книжки При выполнении работы студенты знакомятся с рекомендуемой основной и дополнительной литературой. Структура контрольной работы: с новой страницы – номер и содержание задания, ниже краткий аналитический ответ по сути задания (до 2 страниц на задания 1,2,5; до 16 страниц – на задания 3,4), список литературы (введение, содержание, приложения не требуются). Общий объем работы – до 24 стр. Оформление контрольной работы должно соответствовать требованиям, приведенным в методическом пособии «Выполнение контрольных и курсовых работ: Методические рекомендации для студентов, обучающихся по ФГОС-3» (ВСЭИ, 2013).
6. Учебно-методическое обеспечение А. Основная литература 1. Егоров, А.И. Основы теории управления / А.И. Егоров. – М.: Физматлит, 2007. – 504 с. 2. Мирошник, И.В. Теория автоматического управления. Линейные системы: учебное пособие для вузов / И.В. Мирошник. – СПб.: Питер, 2005. - 336 с. 3. Шишмарев, В.Ю. Основы автоматического управления: учеб. пособие / В.Ю. Шишмарев. – М.: Академия, 2008. – 353 с.
Б. Дополнительная литература 1. Алексеев А.А., Имаев Д.Х., Кузьмин Н.Н., Яковлев В.Б. Теория управления: учебник. – СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 1999. 2. Анализ и синтез систем управления / Д.Х. Имаев и др. – СПб., Гданьск, Сургут, Томск: Информ-изд. центр Сургут. гос. ун-та, 1998. 3. Бессекерский В.А., Изранцев В.В. САУ с микро ЭВМ. – М., Наука, 1981. 4. Давыдов А.В. Основы теории управления. Тематические лекции: учебное пособие. – Екатеринбург, УГГУ, ИГиГ, каф. ГИН. – http://www.prodav.narod.ru/otu/index.html. 5. Давыдов А.В. Лабораторные работы по курсу "Основы теории управления": учебное пособие. – Екатеринбург, УГГУ, ИГиГ, ГИН. – http://www.prodav.narod.ru/otu/practical/otulab.doc. 6. Ерофеев А.А. Теория автоматического управления: учебник для вузов. – СПб.: Политехника, 1998. 7. Лазарева Т. Я., Мартемьянов Ю. Ф. Основы теории автоматического управления: учебное пособие. - Тамбов: Изд-во Тамб. гос. техн. ун-та, 2003. – 308 с. 8. Повзнер Л.Д. Теория систем управления: учебное пособие. – М.: Изд. МГГУ, 2002. – 472 с.
В. Программное обеспечение Пакет MicroSoft Office, программа SamSim, ЯВУ Pascal.
Приложения Приложение 1
Приложение к заданию № 3
Линейные дифференциальные уравнения http://kurs.ido.tpu.ru/courses/tay/chapter_2/glv_2_page_1.html
Наиболее общей и наиболее полной формой математического описания автоматических систем и их элементов является дифференциальное уравнение вида. Желаемый закон в них имеет вид
где Уравнение (1) устанавливает связь между входной и выходной величиной как в переходных, так и в установившихся режимах. Коэффициенты дифференциального уравнения называются параметрами. Они зависят от различных физических констант, характеризующих скорость протекания процессов в элементах. Такими константами являются, например, массы движущихся частей, индуктивности и емкости электрических цепей, теплоемкости нагреваемых элементов. Иногда параметры некоторых элементов систем изменяются во времени. Такую систему называют нестационарной или системой с переменными параметрами. Системой с переменными параметрами является, например, автоматическая система управления приводом поворота мощного экскаватора, если в процессе его поворота одновременно происходит выдвижения рукояти с ковшом. В большинстве практических случаев коэффициенты уравнения существенно не изменяются и системы являются системами с постоянными параметрами. В дальнейшем будут рассматриваться только такие системы. Для автоматических систем управления, описываемых линейным уравнением, справедлив принцип наложения или суперпозиции, согласно которому изменение выходной величины Это свойство линейных систем имеет большое практическое значение, так как благодаря ему значительно облегчаются все расчеты. Рассмотрим типовые формы записи линейного дифференциального уравнения (1), используемые в различных задачах теории автоматического управления. Все физические переменные, входящие в уравнение, могут быть выражены в относительных единицах. Для этого каждое слагаемое делят на постоянную величину, имеющую размерность той переменной, которая входит в это слагаемое. Постоянные величины называют базовыми. В качестве базовых величин обычно принимают номинальные или установившиеся значения переменных Удобной формой записи линейных дифференциальных уравнений является символическая или операторная. Переход к операторной форме осуществляют введением сокращенного условного обозначения операции дифференцирования:
тогда уравнение (2) в символической форме будет иметь вид.
Многочлены от
называют собственным оператором, а многочлен
называют входным оператором или оператором воздействия. Название "собственный оператор" обусловлено тем, что многочлен У всех реальных элементов и систем порядок наивысшей производной во входном операторе не может быть больше порядка наивысшей производной в собственном операторе, т.е. всегда Уравнения элементов невысокого порядка
путем деления всех членов на коэффициент
где Коэффициенты
Пример 1 Составить дифференциальное уравнение электрической цепи (рис. 1).
Рисунок 1. Схема одноконтурной электрической цепи Решение. Входной величиной для цепи является напряжение
Выходное напряжение
откуда определим значение тока
Подставим (10) в (8):
Уравнение (11) является интегро-дифференциальным и его необходимо привести к дифференциальной форме. После дифференцирования (11) получим:
Уравнение (12) приводится к стандартной форме:
где В операторной форме уравнение (13) представляется как
Временные характеристики Дифференциальное уравнение является самой общей формой описания элемента и не дает наглядного представления о передаточных свойствах элемента. Наглядное представление об этих свойствах дает функция Наиболее наглядное представление о динамических свойствах элемента дает его переходная функция (характеристика). Переходной функцией Переходная функция
Свободная составляющая может быть найдена как решение однородного дифференциального уравнения (при отсутствии одинаковых корней):
где
Рисунок 2. Переходная (а) и импульсная (б) характеристики Переходная функция определится как сумма вынужденной и свободной составляющих. Характеристическое уравнение, соответствующее определенному дифференциальному уравнению, представляет собой алгебраическое уравнение, степень и коэффициенты которого совпадают с порядком и коэффициентами левой части этого уравнения. Для дифференциального уравнения, записанного в форме (6), характеристическое уравнение имеет вид
Структура характеристического уравнения (2.10) совпадает со структурой левой части уравнения (2.3) и со структурой собственного оператора Для линейных элементов и систем, кроме принципа суперпозиции, справедливо еще одно общее правило: реакция Импульсной переходной функцией Импульсная переходная функция
и наоборот, переходная функция равна интегралу от импульсной переходной функции:
Переходные характеристики называют также временными. Пример 2 Для электрической цепи (рис. 3) определить переходную функцию.
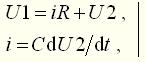
Рисунок 3. Электрическая RC-цепь и ее переходная функция Решение. Электрической цепи соответствуют уравнения:
которые путем исключения промежуточной переменной
или в стандартной форме:
где Из (22) составляем характеристическое уравнение
и определяем корень Переходная функция
При Окончательно имеем
Переходная функция показана на рис. 3. Пример 3 Найти передаточную функцию для электрической цепи, схема которой приведена в примере 1 (рис. 1). Входной величиной является напряжение Передаточную функцию электрических цепей удобно получить на основе операторной схемы замещения цепи для нулевых начальных условий. Напомним, что операторное сопротивление индуктивности равно
Рисунок 4. Операторная схема замещения для определения W(p) Решение. Для операторной схемы замещения относительно изображений переменных справедливы законы Кирхгофа. На основании 2-го закона Кирхгофа составим уравнение
Изображение выходного напряжения с изображением тока связано соотношением
Исключив из уравнений промежуточную величину
откуда определим передаточную функцию как
Значения постоянных времени Тот же результат может быть получен и из уравнения (7) примера 1. Пример 4 Найти аналитические выражения для частотных характеристик для цепи (пример 3, рис. 4), имеющей передаточную функцию
Решение. Амплитудно-фазовая функция цепи равна (замена
Выражение для амплитудной частотной характеристики найдем как
Фазовая частотная характеристика определится как разность аргументов числителя и знаменателя
Приложение 2
Приложение к заданию № 4 АУ и типовых схем АУ
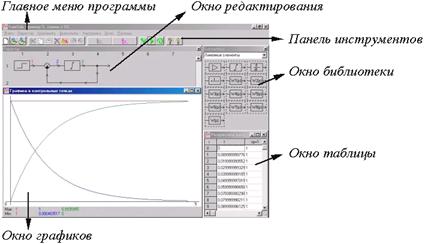
Назначение системы автоматизированного моделирования “SamSim” Программа предназначена для моделирования линейных и нелинейных цепей в системах автоматического управления. Работает с моделями, которые можно представить в форме блок-схем.
Рисунок 1. Главное окно программы
С помощью программы возможно: - построение любых схем моделей из библиотек элементов, - задание параметров интегрирования и параметров элементов, - сохранение в файле и считывание из файла модели, - построение зависимостей от времени в любых точках схемы, - построение фазовых портретов для любых схем, - построение частотных характеристик для любых линейных схем, - вывод результатов расчёта в графической и табличной форме, - вывод на печать схемы и её параметров, результатов расчёта.
Шаг 1. Посмотреть содержание разделов меню «Файл» Настройки программы (меню «Настройки»).
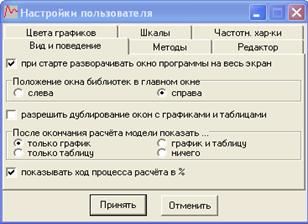
Рисунок 2. Пункт меню “Настройки пользователя»
На вкладке «Вид и поведение» можно задать окно программы, положение окна Библиотек относительно окна Редактора (слева или справа в главном окне), вывод результатов расчетов.
Шаг 2. Установить параметры, как показано на рисунке. На вкладке «Методы» можно задать точность выполнения расчетов и решения дифференциальных уравнений.
Шаг 3. Установить 2-ой порядок точности.
Шаг 4. Установить вывод частотных характеристик в радианах.
Шаг 5. Просмотреть содержание и установить остальные настройки – по индивидуальному предпочтению. Расчёт схемы. Для расчёта схемы выберите в главном меню пункт “Выполнить” > “Расчёт” или нажмите кнопку
Шаг 7. 1. Поставьте контрольные точки на выходах всех блоков. 2. Установите для входного сигнала: задержку Т=1 с, амплитуду А=N, где N здесь и в дальнейших заданиях – Ваш номер в списке студентов группы на лабораторные занятия. 3. Вычислите графики контрольных точек. 4. Сохраните графики в файл. 5. Сохраните в файл Вашу схему (программу) с именем Demo-1
Создание новой модели Для создания новой схемы модели необходимо выбрать в главном меню программы пункт “Файл” > ”Новая схема” или нажать кнопку Доступ к операциям редактирования возможен как из пунктов главного меню, так и из “поп-меню”, всплывающего по щелчку правой кнопки мышки, или с помощью кнопок на панели инструментов.
Шаг 8. 1. Составьте новую схему типа схемы Demo0.sam, но не с параллельным, а последовательным соединением элементов. 2. Поставьте контрольные точки на выходах всех блоков. 3. Установите параметры входного сигнала, как в задании 7. 4. Вычислите графики контрольных точек и сохраните их в файл.
Задание названия модели Для задания названия модели необходимо выбрать пункт меню "Назначить" > “Название модели”. Название модели отображается в верхней полосе главного окна программы после имени файла модели.
Шаг 9. Задайте название Вашей модели Demo-2.sam, и запишите файл.
Задание параметров элементов схемы Пока не заданы параметры для всех элементов схемы, расчёт схемы невозможен. Задание параметров элементов схемы производится через пункт главного меню “Назначить” > ”Параметры элемента” или через пункт меню, всплывающего по нажатию правой кнопки, или с помощью кнопку «k=…» на панели инструментов.
Шаг 10. Задайте в модели Demo-2.sam, более длинный временной интервал, посмотрите и сохраните графики. Если для элемента схемы не заданы параметры, то этот элемент помечается значком * (сиреневая звёздочка или чёрный кружок) в левом верхнем углу изображения элемента на схеме. После нажатия кнопки “Принять” в диалоговом окне задания параметров происходит автоматическая проверка корректности введённых значений. В случае некорректности задания выводится соответствующее сообщение. После сохранения модели в файле все заданные параметры элементов также сохраняются в файле. Задание параметров интегрирования Задание параметров интегрирования (начало, конец и временной шаг расчетов для графиков) производится через пункт главного меню “Задать” > “Параметры интегрирования” или с помощью соответствующей кнопки «t=…» на панели инструментов. Задание параметров интегрирования необязательно, если подходят значения установленные программой по умолчанию, равные от 0 до 5 с. с шагом 0.01. Шаг 11. Измените параметры интегрирования в модели Demo-2.sam, посмотрите и сохраните графики. Проверка схемы После составления схемы и задания всех параметров элементов можно проверить ее на корректность составления - пункт меню “Выполнить” > ”Проверка схемы” или нажатие кнопки Проверка производится автоматически (если она не была сделана) перед началом выполнения расчёта схемы. Необходимые условия корректности схемы: в ней есть хотя бы один источник сигнала и параметры всех элементов заданы.
Шаг 12. Загрузить модель Demo2.sam, разорвать цепь обратной связи и проверить схему.
Частотные характеристики Для построения частотных характеристик на входе схемы должен стоять генератор качающейся частоты (ГКЧ). Частотный диапазон и типы характеристик (АЧХ, ФЧХ, ЛЧХ, АФЧХ), выводимых на экран в графическом виде, задаются как параметры входного элемента – ГКЧ. В таблицу с результатами расчёта выводятся значения и для амплитуды (АЧХ или ЛЧХ), и для фазы, независимо от того, какой график выбран для отображения.
Шаг 13. В модели Demo-1 замените блок входного сигнала на генератор ГКЧ и вычислите последовательно все типы частотных характеристик. Графики характеристик запишите в файлы.
Годограф (АФЧХ) Для построения годографа (АФЧХ) на входе схемы должен стоять генератор качающейся частоты ГКЧ. Частотный диапазон и вид характеристики – годограф задаются как параметры входного элемента – ГКЧ. Выбор масштаба характеристики (линейный, логарифмический), как параметра ГКЧ, не влияет на вид годографа.
Шаг 14. Пример построения годографа посмотреть на модели Demo-1.sam, в которой блоки W8p заменить на блоки W1p с параметрами по Т = N, N/2, N/4.
СОЦИАЛЬНО-ЭКОНОМИЧЕСКИЙ ИНСТИТУТ кафедра информатики и вычислительной техники Основы теории автоматического управления
Методические указания по самостоятельной работе студентов направления подготовки
|
||||||||||||
|
|
Последнее изменение этой страницы: 2021-01-14; просмотров: 186; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.20 (0.015 с.) |


 и
и  – входная и выходная величины элемента или системы;
– входная и выходная величины элемента или системы;  – коэффициенты уравнения.
– коэффициенты уравнения. , возникающее при действии на систему нескольких входных сигналов
, возникающее при действии на систему нескольких входных сигналов  , равно сумме изменений
, равно сумме изменений  величины
величины  , вызываемых каждым сигналом в отдельности.
, вызываемых каждым сигналом в отдельности. и
и  .
. . Соответственно, k-ю производную переменной
. Соответственно, k-ю производную переменной  обозначают,
обозначают,  (2)
(2) (3)
(3) степени
степени  и
и  , находящиеся в левой и правой частях уравнения (3), называются дифференциальными операторами. Каждый такой оператор устанавливает соответствие между функцией времени и определенной совокупностью производных этой функции. Многочлен
, находящиеся в левой и правой частях уравнения (3), называются дифференциальными операторами. Каждый такой оператор устанавливает соответствие между функцией времени и определенной совокупностью производных этой функции. Многочлен (4)
(4) (5)
(5) характеризует собственное (свободное) движение элемента, т.е. движение при отсутствии внешних воздействий. Оператор
характеризует собственное (свободное) движение элемента, т.е. движение при отсутствии внешних воздействий. Оператор  . Если это условие не выполняется, то уравнение соответствует физически нереализуемой системе.
. Если это условие не выполняется, то уравнение соответствует физически нереализуемой системе. в теории автоматического управления принято записывать в так называемой стандартной форме. При стандартной форме записи уравнение преобразовывают таким образом, чтобы коэффициент при выходной величине был равен единице. При этом коэффициент перед входной величиной в правой части уравнения становится равным передаточному коэффициенту, а коэффициенты при производных выходной величины будут иметь размерность времени в степени, равной порядку соответствующей производной. Например, уравнение второго порядка
в теории автоматического управления принято записывать в так называемой стандартной форме. При стандартной форме записи уравнение преобразовывают таким образом, чтобы коэффициент при выходной величине был равен единице. При этом коэффициент перед входной величиной в правой части уравнения становится равным передаточному коэффициенту, а коэффициенты при производных выходной величины будут иметь размерность времени в степени, равной порядку соответствующей производной. Например, уравнение второго порядка (6)
(6) может быть приведено к стандартной форме
может быть приведено к стандартной форме , (7)
, (7) ,
,  ,
,  ,
,  .
. ,
,  ,
,  , принято называть постоянными времени, характеризующими динамические свойства элемента.
, принято называть постоянными времени, характеризующими динамические свойства элемента.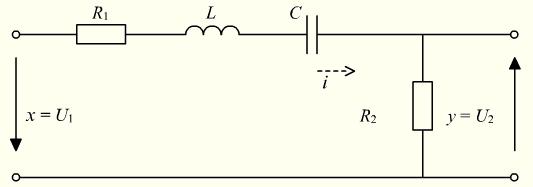
 , а выходной величиной – напряжение
, а выходной величиной – напряжение  . В динамических режимах по одноконтурной цепи протекает ток
. В динамических режимах по одноконтурной цепи протекает ток  . Выходное напряжение равно падению напряжения на сопротивлении
. Выходное напряжение равно падению напряжения на сопротивлении  . На основании второго закона Кирхгофа при нулевых начальных условиях составим уравнение:
. На основании второго закона Кирхгофа при нулевых начальных условиях составим уравнение: . (8)
. (8) , (9)
, (9) . (10)
. (10) . (11)
. (11) (12)
(12) (13)
(13) .
. . (14)
. (14) , являющаяся решением дифференциального уравнения. Но одно и то же дифференциальное уравнение может иметь множество решений, зависящих от начальных условий и вида внешнего воздействия
, являющаяся решением дифференциального уравнения. Но одно и то же дифференциальное уравнение может иметь множество решений, зависящих от начальных условий и вида внешнего воздействия  . Поэтому принято динамические свойства элементов и систем характеризовать решением, соответствующим нулевым начальным условиям и одному из типовых воздействий. В качестве типового воздействия принимают единичное ступенчатое, дельта-функцию или гармоническое воздействие.
. Поэтому принято динамические свойства элементов и систем характеризовать решением, соответствующим нулевым начальным условиям и одному из типовых воздействий. В качестве типового воздействия принимают единичное ступенчатое, дельта-функцию или гармоническое воздействие. . называют изменение выходной величины
. называют изменение выходной величины  во времени, возникающее после подачи на вход единичного ступенчатого воздействия, при нулевых начальных условиях. Переходная функция может быть задана в виде графика (рис. 2, а) или аналитически.
во времени, возникающее после подачи на вход единичного ступенчатого воздействия, при нулевых начальных условиях. Переходная функция может быть задана в виде графика (рис. 2, а) или аналитически. , как и любое решение неоднородного дифференциального уравнения, имеет две составляющие: вынужденную
, как и любое решение неоднородного дифференциального уравнения, имеет две составляющие: вынужденную  и свободную
и свободную  . Вынужденная составляющая переходного процесса представляет собой частное решение исходного уравнения. При ступенчатом воздействии вынужденная составляющая равна установившемуся значению выходной величины, которое для статических элементов может быть определено непосредственно из дифференциального уравнения (при нулевых производных):
. Вынужденная составляющая переходного процесса представляет собой частное решение исходного уравнения. При ступенчатом воздействии вынужденная составляющая равна установившемуся значению выходной величины, которое для статических элементов может быть определено непосредственно из дифференциального уравнения (при нулевых производных): . (15)
. (15) , (16)
, (16) – корни характеристического уравнения;
– корни характеристического уравнения;  – постоянные интегрирования, зависящие от начальных условий.
– постоянные интегрирования, зависящие от начальных условий.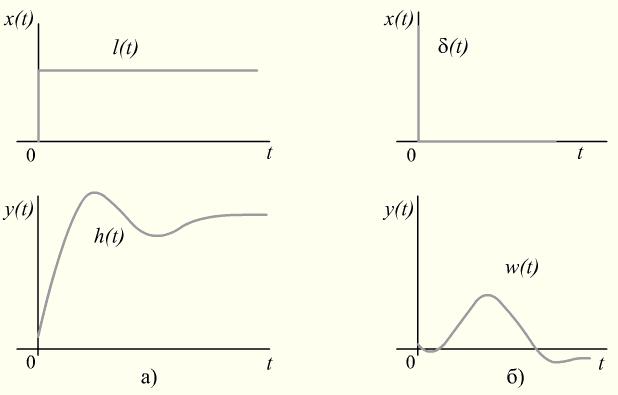
 . (17)
. (17) (см. (4)). Поэтому при записи характеристического уравнения часто вместо символа
(см. (4)). Поэтому при записи характеристического уравнения часто вместо символа  , обозначающего неизвестную переменную алгебраического уравнения, используют символ
, обозначающего неизвестную переменную алгебраического уравнения, используют символ  . Но при этом
. Но при этом  на неединичное воздействие
на неединичное воздействие  равна
равна  .
. называют изменение выходной величины
называют изменение выходной величины  , возникающее после подачи на вход дельта-функции, при нулевых начальных условиях (рис. 2, б).
, возникающее после подачи на вход дельта-функции, при нулевых начальных условиях (рис. 2, б). :
: , (18)
, (18) . (19)
. (19)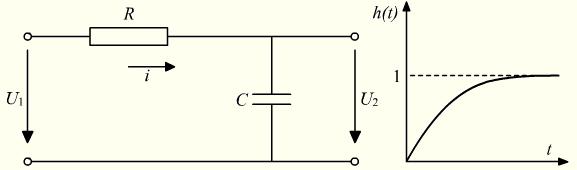
 (20)
(20) приводятся к одному дифференциальному уравнению:
приводятся к одному дифференциальному уравнению: (21)
(21) , (22)
, (22) .
. (23)
(23) .
. . При единичном воздействии
. При единичном воздействии  вынужденная составляющая также равна единице:
вынужденная составляющая также равна единице:  . Тогда
. Тогда (24)
(24) , и тогда из (24) определим постоянную интегрирования
, и тогда из (24) определим постоянную интегрирования  .
. (25)
(25) , а выходной – напряжение
, а выходной – напряжение  .
. , емкости –
, емкости –  , а активного сопротивления –
, а активного сопротивления –  . На рис. 4 приведена операторная схема замещения рассматриваемой цепи.
. На рис. 4 приведена операторная схема замещения рассматриваемой цепи.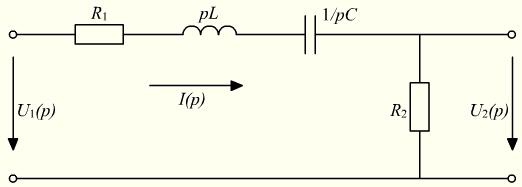
 . (32)
. (32) . (33)
. (33) , после преобразований получим
, после преобразований получим  , (34)
, (34) . (35)
. (35) ,
,  и
и  приведены в примере 1.
приведены в примере 1. .
.  )
) .
. .
. :
: .
. 
 панели инструментов. Для проведения расчёта схемы должна быть установлена хотя бы одна контрольная точка. По результатам расчета будут построены графики в заданных контрольных точках схемы. Вид графика (зависимость от времени или частотные характеристики) зависит от типа входного элемента, задающего сигнал. Цвет кривой на графике соответствует цвету номера контрольной точки.
панели инструментов. Для проведения расчёта схемы должна быть установлена хотя бы одна контрольная точка. По результатам расчета будут построены графики в заданных контрольных точках схемы. Вид графика (зависимость от времени или частотные характеристики) зависит от типа входного элемента, задающего сигнал. Цвет кривой на графике соответствует цвету номера контрольной точки. на панели инструментов. Выбрав библиотеку элементов в окне Библиотеки, перетаскиваем мышкой из неё элементы в поле Редактора или, выбрав щелчком мыши будущее положение элемента в поле Редактора, дважды щёлкнуть левой кнопкой мышки по нужному элементу в окне Библиотеки.
на панели инструментов. Выбрав библиотеку элементов в окне Библиотеки, перетаскиваем мышкой из неё элементы в поле Редактора или, выбрав щелчком мыши будущее положение элемента в поле Редактора, дважды щёлкнуть левой кнопкой мышки по нужному элементу в окне Библиотеки. на панели инструментов. Результат проверки будет сообщён.
на панели инструментов. Результат проверки будет сообщён.


