Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Тормозные режимы работы электроприводов
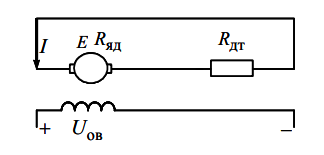
В электроприводах с релейно-контакторными схемами управления применяются три вида электрического торможения: рекуперативное, динамическое, торможение противовключением. Рекуперативное торможение обычно применяется для реверсивных электроприводов с активной нагрузкой, при работе электропривода во втором квадранте – с угловой скоростью, большей скорости идеального холостого хода. Электромеханическая и механическая характеристики режима рекуперативного торможения являются продолжением характеристик двигательного режима работы электрических машин и рассчитываются по уравнению (2.14) для двигателя постоянного тока независимого возбуждения. На практике, при питании обмоток двигателя постоянного тока от нерегулируемого выпрямителя, для возникновения режима рекуперативного торможения необходимо наличие параллельно с двигателем нагрузки. Торможение противовключением применяется для реверсивных электроприводов, в которых замедление электропривода переходит в режим пуска в противоположном направлении или только для быстрой неавтоматической остановки. Режим торможения противовключением используется также для работы с установившейся скоростью электроприводов с активной нагрузкой в четвертом квадранте. Динамическое торможение, как правило, применяется для нереверсивных электроприводов. Оно применяется и для реверсивных электроприводов с реактивной нагрузкой, требующих автоматической остановки. Для электроприводов с активной нагрузкой режим динамического торможения используется для работы с малой установившейся скоростью в четвертом квадранте. В электроприводах постоянного тока перевод двигателя в режим динамического торможения осуществляется отключением обмотки якоря от источника постоянного напряжения и замыканием ее через добавочное сопротивление накоротко. Схема включения электрической машины в режиме динамического торможения приведена на рис. 2.4.
Рис 2.4 Схема включения двигателя постоянного тока независимого возбуждения в режиме динамического торможения
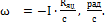
Уравнение электромеханической характеристики при динамическом торможении образуется из выражения для электромеханической характеристики при подстановке в него напряжения якоря U = 0:
где Rяц = Rяд.гор + Rдт – сопротивление якорной цепи двигателя в режиме динамического торможения; Ток в якоре электрической машины протекает за счет ЭДС E
Электромеханические характеристики электропривода постоянного тока, работающего в режиме динамического торможения, приведены на рис. 2.5.
Рис 2.5 Электромеханические характеристики режима динамического торможения двигателя постоянного тока
Данный режим работы возникает при преобразовании потенциальной энергии в электрическую (активная нагрузка на валу двигателя, работа электропривода с установившейся скоростью ωу2) или при преобразовании кинетической энергии в электрическую (торможение двигателя при уменьшении ЭДС на обмотке якоря до нуля, начиная с установившейся скорости ωу1). Электрическая энергия от протекающего по якорю тока рассеивается на активных сопротивлениях якорной цепи двигателя Rяц = Rдв + Rдт, преобразуясь в тепловую.
Расчет переходных процессов Переходным, или динамическим, режимом электропривода называется режим работы при переходе из одного установившегося состояния привода к другому, происходящему во время пуска, торможения, реверсирования и резкого приложения нагрузки на валу. Метод расчета переходных процессов выбирается в соответствии с типом электропривода, формой механической характеристики производственного механизма и двигателя. Эти режимы характеризуются изменениями ЭДС, угловой скорости, момента и тока. Переходные процессы тока и скорости электропривода постоянного тока независимого возбуждения при линейных статических характеристиках двигателя можно рассчитать по следующим формулам:
где Iнач - начальное значение тока двигателя, А; Iуст – установившееся значение тока двигателя; ω уст –угловая скорость двигателя при моменте нагрузки М с = M уст; ω – начальное значение угловой скорости, рад/с; Т м – электромеханическая постоянная времени, с.
Расчет электромеханических постоянных времени Тмi для каждой из реостатных характеристик осуществляется по формуле:
где Rяцi – суммарное сопротивление якорной цепи на соответствующей характеристике, Ом; сн– коэффициент ЭДС, (В* с)/рад;
где k = (1,05 -1,3) – коэффициент, учитывающий момент инерции редуктора; Jдв – момент инерции двигателя, кг· JМ – момент инерции производственного механизма; iст.р– стандартное передаточное отношение редуктора.
Время tппi работы двигателя на i-ой характеристике, при изменении момента в пределах от Мнач до Мкон, определяется по формуле:
где Мнач и Мкон – значения моментов в начале и конце рассматриваемого переходного процесса; Mуст – установившийся момент двигателя.
Например, для определения времени переходного процесса при пуске из неподвижного состояния до скоростиωнач2 (см. рис. 2.6) в уравнение (2.31) необходимо подставить
Рис 2.6 Пусковые механические характеристики двигателя постоянного тока независимого возбуждения
Учитывая, что электромагнитный момент двигателя постоянного тока пропорционален току обмотки якоря, уравнение для расчета времени переходного процесса можно преобразовать к виду:
где Iнач и Iкон – значения токов двигателя, взятые из графика электромеханической характеристики в начале и конце рассматриваемого переходного процесса; Iуст – установившийся ток якоря двигателя.
Для случаев когда
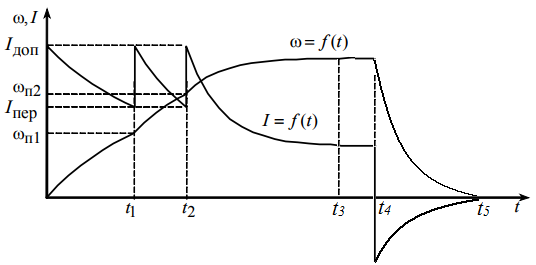
Рис 2.7 Графики переходных процессов скорости и тока при пуске двигателя постоянного тока в две ступени
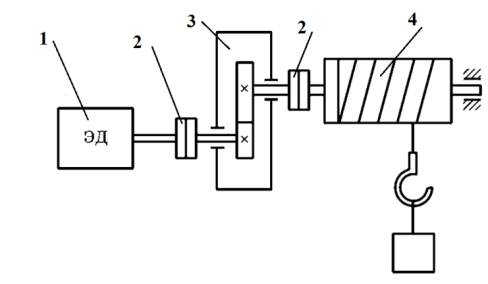
Участок (0 – t1) – разгон электропривода на первой ступени; ПРИМЕР РАСЧЕТА ЭЛЕКТРОПРИВОДА С ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ Необходимо разработать электропривод производственного механизма, удовлетворяющего указанным техническим условиям и требованиям В качестве регулируемого электропривода принять привод постоянного тока индивидуального изготовления с параметрическим регулированием скорости изменением активного сопротивления в цепи обмотки якоря Кинематическая схема электропривода представлена на рис. 3.1.
Рис. 3.1. Кинематическая схема электропривода: 1 – двигатель постоянного тока; 2 – муфта; 3 – редуктор; 4 – рабочий орган исполнительного механизма
Исходные данные Первая частота вращения механизма Вторая частота вращения механизма Время работы на первой технологической частоте вращения: Время работы на второй технологической частоте вращения: Время паузы Момент сопротивления механизма
Характер нагрузки – активная; КПД передачи при максимальной (заданной) частоте вращения – 0,96; Момент инерции механизма – 45 кг·м2.
|
|||||||
|
|
Последнее изменение этой страницы: 2020-11-28; просмотров: 679; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.221.165.246 (0.023 с.) |
 (2.27)
(2.27)
 (2.28)
(2.28)
 ;
;  (2.29)
(2.29) ;
;  (2.31)
(2.31) суммарный приведенный момент инерции, кг·
суммарный приведенный момент инерции, кг·  ;
; (2.32)
(2.32) (2.33)
(2.33) ,
,  и
и  . Где Мс – значение момента в точке физически установившегося режима работы электродвигателя.
. Где Мс – значение момента в точке физически установившегося режима работы электродвигателя.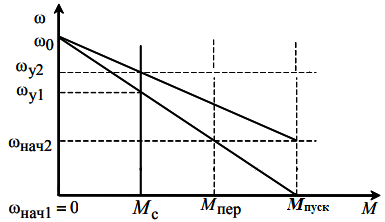
 (2.34)
(2.34) или
или  , время переходного процесса определяется по следующей формуле:
, время переходного процесса определяется по следующей формуле: (2.35)
(2.35)