
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Последовательность графического дифференцирования диаграмм ⇐ ПредыдущаяСтр 6 из 6
Задана диаграмма перемещений точки Требуется построить диаграмму скоростей. 1. Делим участок оси абсцисс на несколько равных частей (например, 2. В новой системе координат (рис. 3.12, б) выбираем точку Р на расстоянии Н и проводим из нее прямые, параллельные соответствующим хордам (Ра΄ // а b, Р b ΄ // bc, …, Р f ΄ // fg), до пересечения с осью ординат. 3. Сносим значения средних скоростей на соответствующие участки оси абсцисс (0—1, 1—2,..., 5—6). Получим ступенчатый график скорости. Через середины отрезков проводим плавную кривую. Полученная кривая позволяет определить скорость точки в любом положении механизма. Для этого измеряем ординату в соответствующей точке и умножаем ее на масштабный коэффициент. Значения масштабного коэффициента зависят от расстояния Н, на котором выбирается полюс Р (см. рис. 3.12, б; и формулу 3.49).
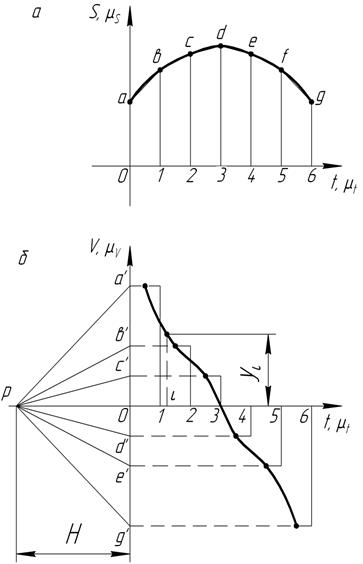
Рис. 3.12. Графическое дифференцирование кинематических диаграмм
3.8.2. Последовательность графического интегрирования диаграмм Графическое интегрирование кинематических диаграмм осуществляется в обратном порядке (рис. 3.13). Пусть задана диаграмма ускорений в виде плавной кривой. 1. Делим участок оси абсцисс на равные отрезки и заменяем кривую ступенчатым графиком, принимая точки a 1, b 1, …, f 1, посередине отрезков времени (см. рис. 3.13, а). 2. Сносим точки a 1, b 1,…, f 1 на ось ординат и соединяем полученные точки a΄, b΄, …, f΄, с полюсом (точкой Р), выбранным на произвольном расстоянии Н от начала координат. 3. В новой системе координат (см. рис. 3.13, б) принимаем точку а на оси ординат, имеющую координату S 0. Это - постоянная интегрирования, которая определяется из начальных условий. 4. Проводим в пределах соответствующих интервалов времени (0—1, 1—2,..., 5—6) хорды ab, bc, …, fg, параллельные лучам Pa ΄, Pb΄, Pf ΄.
Получаем график в виде ломаной линии, который заменяем плавной кривой. Масштабный коэффициент полученной диаграммы в соответствии с зависимостью (3.49) определяется по формуле:
Отсюда получаем
где μа - масштабный коэффициент диаграммы ускорений.
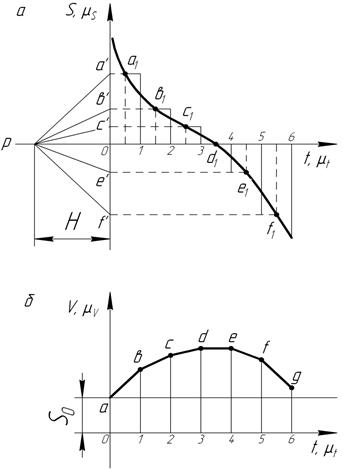
Рис. 3.13. Графическое интегрирование кинематических диаграмм Вопросы для самоконтроля: 1. Что называется масштабным коэффициентом? 2. Сформулируйте принцип подобия в плане скоростей. 3. Сформулируйте принцип подобия в плане ускорений. 4. Что называется аналогом скорости? 5. Единицы измерения аналога скорости. 6. Связь истинной скорости с ее аналогом. 7. Что называется аналогом ускорения? 8. Единицы измерения аналога ускорения. 9. Аналог угловой скорости и углового ускорения. ЗАКЛЮЧЕНИЕ Изложенные в учебном пособии разделы посвящены общим методам исследования структуры и кинематики механизмов. Эти задачи позволяют выполнить анализ механизмов на основе изучения строения механизмов, исследования их движения с геометрической точки зрения. Материал учебного пособия создает необходимую базу для решения многих технических задач. Знание основ теории механизмов позволяет студенту грамотно и творчески подойти к проектированию деталей машин и сборочных единиц, к решению задач оптимального управления машинами, механизмами и их элементами. В процессе изучения курса студенты имеют возможность проверить свои знания, отвечая на вопросы для самоконтроля. БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов.- 4-е изд. – М.: Наука, 1988. – 640 с. 2. Эльяш Н.Н., Гурьев Е.С. Т еория механизмов и машин и детали машин: Учеб. пособие / Свердл. инж.-пед- ин-т. Свердловск. 1990. Ч 1. 96 с. 3. Эльяш Н.Н., Гурьев Е.С. Теория механизмов и машин и детали машин: Учеб. пособие / Свердл. инж.-пед- ин-т. Свердловск. 1991. Ч. 2. 80 с. 4. Теория механизмов и механика машин: Учеб. для вузов / К.В. Фролов, С.А. Попов, А.К. Мусатов и др.; Под ред. К.В. Фролова. – 5-е изд., стереотип.- М.: Изд-во МГТУ им. Баумана, 2004. – 664 с.: ил. 5. Теория механизмов и машин. 3-е изд., испр. Коловский М.З., Евграфов А. Н., и др. Издательство: Academia, 2008. – 560 с.: ил
6. Теория механизмов и машин. Матвеев Ю.А., Матвеева Л.В., 7. Учебно-методическое пособие к курсовой работе по дисциплине "Теория механизмов и машин" «Структурный анализ плоских механизмов». О.В. Бердюгина, 2017г. - 17 стр 8. Учебно-методическое пособие к курсовой работе по дисциплине "Теория механизмов и машин" «Построение плана положений механизма» О.В. Бердюгина, 2017г. - 11 стр. 9. Учебно-методическое пособие к курсовой работе по дисциплине "Теория механизмов и машин" «Построение планов скоростей» О.В. Бердюгина, 2017г. - 18стр 10. Учебно-методическое пособие к курсовой работе по дисциплине "Теория механизмов и машин" «Построение кинематических диаграмм» О.В. Бердюгина, 2017г. - 9стр 11.
Эльяш Наталья Николаевна Бердюгина Ольга Владимировна
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Учебное пособие для студентов направления обучения «Агроинженерия»
|
||||||||||
|
|
Последнее изменение этой страницы: 2020-12-17; просмотров: 170; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.129.22.135 (0.008 с.) |
 (рис. 3.12, а).
(рис. 3.12, а). (3.50)
(3.50) (3.51)
(3.51) (3.52)
(3.52) 


