Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Замена высших кинематических пар низшими
В плоских механизмах все пары 4-го класса являются высшими, а пары
n — число подвижных звеньев; p н — число низших кинематических пар; При структурном анализе плоских механизмов высшие пары можно заменить низшими. Рассматривать механизмы с низшими парами удобнее, т. к. для них решены все основные задачи анализа механизмов. При замене высших пар на низшие должны выполняться следующие условия: 1) степень подвижности механизма должна оставаться неизменной; 2) относительное движение звеньев также должно сохраняться. Если убрать из кинематической цепи пару 4-го класса, то число степеней свободы станет на единицу больше, т. к. пара 4-го класса в плоском механизме накладывает одну связь (три общих связи уже наложено). Вместо отброшенной пары необходимо приложить кинематическую цепь, содержащую только низшие пары. Тогда, чтобы выполнить 1-е условие, необходимо соблюсти равенство: W 0 - степень подвижности исходной цепи; (W 0 + 1) - степень подвижности цепи с отброшенной высшей (3 n – 2 p 5) - степень подвижности цепи замены (содержащей только низшие пары). Преобразуем равенство (1.6) Полученное выражение устанавливает соотношение между числом звеньев и числом кинематических пар 5-го класса в цепи замены. Учитывая, что p 5 и n - целые числа, определяется минимальное число звеньев и кинематических пар в цепи замены:
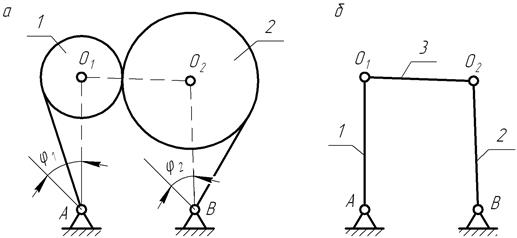
Вывод: высшую пару в кинематической цепи можно заменить дополнительным звеном и двумя низшими парами. Пример. Имеется механизм, состоящий из звеньев 1 и 2 (рис. 1.4).Контакт между звеньями - в точке, которая представляет собой высшую пару; А и В - низшие пары (вращательные); О 1и О 2 — центры кривизны звеньев. Для замены высшей кинематической пары (рис. 1.4, а) проводим нормаль в точке касания звеньев до центров кривизны О 1и О 2 (пунктирная линия). Соединяя точки О 1и О 2 с точками А и В, получим шарнирный четырехзвенник, у которого все пары низшие. Таким образом, высшую пару (точку касания звеньев) заменили дополнительным звеном 3и двумя низшими парами О 1и О 2 (рис. 1.4, б).
Рис 1.4. Замена высшей пары на низшие. Следует иметь в виду, что заменяющий механизм имеет такой вид только для данного положения. Для каждого нового положения длина звеньев и их взаимное расположение могут быть иными. Определим степень подвижности исходного механизма
Степень подвижности заменяющего механизма
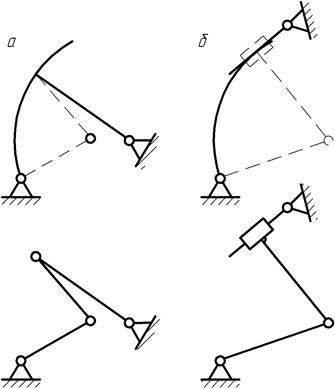
Сравнивая результаты, делаем вывод, что первое условие замены выполняется. Кроме того, если звено 1 повернуть на угол φ1, то звено 2 повернется на соответствующий угол φ2 , т.е. второе условие также выполняется. Сформулируем общие правила замены высших кинематических пар низшими: 1. Если высшие пары представляют собой соприкасающиеся окружности, то при замене низшие пары находятся в центре этих окружностей. 2. Если высшие пары представляют собой окружность или любую произвольную кривую, с одной стороны, и точечный контакт, с другой стороны, то кинематические пары замены находятся в точке контакта и в центре кривизны (рис. 1.5, а). 3. Если контакт в высшей паре происходит по линии, то замена осуществляется поступательной парой (рис. 1.5, б). Рис. 1.5. Варианты замены высших кинематических пар низшими. Последние два вывода представляют собой частные случаи: - для точечного контакта радиус кривизны равен нулю (вращательная пара совпадает с точкой контакта); - для прямой линии радиус кривизны равен бесконечности, т. е. в цепи замены движение должно осуществляться по прямой, а не по окружности (поступательная пара).
|
|||||
|
|
Последнее изменение этой страницы: 2020-12-17; просмотров: 1180; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.33.178 (0.005 с.) |
 (1.5)
(1.5) (1.6)
(1.6) (1.7)
(1.7)