Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематические пары, их классификацияСтр 1 из 6Следующая ⇒
Бердюгина О.В., Эльяш Н.Н.
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Учебное пособие
Екатеринбург 2017
Бердюгина О.В., Эльяш Н.Н. «Теория механизмов и машин»: учебное пособие для студентов направления обучения ««Эксплуатация транспортно-технологических машин и комплексов», Бердюгина О.В., Эльяш Н.Н., Екатеринбург: Изд-во УрГАУ, 2018. - 60с.
Одобрено на заседании кафедры ТТМ протокол №2 от 17января 2018г.
© ФГБОУ ВПО «Уральский государственный аграрный университет», 2018 © Бердюгина О.В., Эльяш Н.Н.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ Пособие предназначено для изучения курса «Теория механизмов и машин» (ТММ). Может быть также полезным при изучении дисциплины «Техническая механика». Курс ТММ является переходным от общетехнических дисциплин к специальным и служит развитию у студентов практических навыков исследования и проектирования различных механизмов; что позволяет расширить технический кругозор и подготовить будущего специалиста к решению разнообразных инженерных задач. В книге рассмотрены вопросы структурного, кинематического и динамического анализа. Материал изложен таким образом, что он побуждает студента в процессе выполнения курсовой работы, расчетно-графических работ либо контрольных работ, использовать теоретический материал как средство решения практических задач, что способствует реализации активных методов обучения. В конце каждой главы приведены вопросы для самоконтроля. Курс "Теория механизмов и машин" (ТММ) представляет собой один из важнейших разделов технической механики и является базовой наукой для изучения специальных учебных дисциплин машиностроительного профиля. Основные задачи курса: научить студентов методам исследования механизмов и машин, умению технически грамотно выполнять расчеты и владеть методами проектирования механизмов. Компетенции, формирующиеся у студентов при выполнении курсовых проектов, ориентированы на применение полученных теоретических знаний, что позволяет осуществить взаимосвязи абстрактного и конкретного мышления, обеспечивает системно-деятельностный подход. Практика самостоятельного обоснования и принятия решений при проектировании создает необходимую базу для саморазвития личности.
Основными разделами данного учебного пособия являются анализ (исследование) механизмов и их синтез (проектирование) схем механизмов. В процессе изучения дисциплины студент должен не только получить теоретические знания, но и развить навыки в их приложении к решению практических задач, приобрести опыт работы с учебной и специальной литературой, а также приобрести основы для научно-исследовательской работы. Особенность предлагаемого пособия состоит в реализации междисциплинарных связей, что обусловливает мотивацию на изучение других общетехнических дисциплин, предусмотренных учебными планами. Вследствие различий в учебных планах специальностей и уровней квалификации, возможны разные формы самостоятельной работы студентов (курсовой проект, расчетно-графические работы, контрольные работы). Поэтому данное пособие составлено с учетом выполнения студентами любой из форм самостоятельной работы, ориентируясь на модульный принцип, соответственно профилю подготовки и требуемому уровню компетенций. 1. ОБЩИЕ СВЕДЕНИЯ О СТРОЕНИИ МЕХАНИЗМОВ 1.1. Основные понятия и определения
Машиной называется устройство, предназначенное для преобразования энергии, материалов или информации с целью облегчения или исключения труда человека. Соответственно, машины бывают энергетические, технологические и транспортные, информационные. Механизмом называется система твердых тел, служащих для преобразования одних видов движения в другие. В настоящее время известно 8 видов механизмов, которые классифицируются по принципу передачи движения: 1) плоские механизмы, у которых движение всех точек происходит в одной плоскости или в параллельных плоскостях; 2) пространственные механизмы, у которых движение точек происходит в разных плоскостях (пересекающихся); 3) кулачковые механизмы, в состав которых входит кулачок — звено переменного профиля; 4) зубчатые механизмы, у которых движение передается по взаимоогибаемым кривым. Эти механизмы могут быть как плоскими, так и пространственными; 5) фрикционные механизмы, у которых движение передается за счет сил трения (фрикционные муфты, вариаторы); 6) механизмы с гибкими связями, у которых движение передается с помощью ремней, цепей, канатов на большие расстояния; 7) волновая передача, которая основана на деформации звеньев (диафрагмы или гибкого колеса); 8) гидравлические или пневматические механизмы, в которых преобразование движения твердых тел происходит посредством жидкости или газа. Жидкости или газы не считаются звеньями, новходят в состав механизма. Все механизмы состоят из звеньев, которые представляют собой одну деталь, либо несколько неподвижно соединенных между собой деталей. В свою очередь звенья бывают подвижными или неподвижными. Неподвижное звено называют стойкой. За стойку принимают основание, раму, корпус, фундамент и все, что с ними неподвижно связано. Стойка в механизме только одна.
Подвижные звенья бывают входные (ведущие) и выходные (ведомые). Входным называют звено, к которому приложено движение извне, а выходным – звено, которое совершает требуемое движение, для выполнения которого служит данный механизм. Поверхности, линии, точки звена, по которым оно соприкасается с другим звеном, называют элементами звена [1, с. 18-21]. Группа Ассура 2-го вида Построение планов скоростей и ускорений рассмотрим на примере кривошипно-ползунного механизма (рис. 3.9). Порядок построения, обозначения, формулы аналогичны рассмотренным выше, поэтому этот и последующий разделы даны в сокращенной форме, без повторения ранее изложенных правил. Дано: кинематическая схема механизма; угловая скорость кривошипа Определить: скорость и ускорение точки В; угловую скорость и угловое ускорение звена АВ. Механизм образован присоединением к ведущему звену группы Ассура II класса 2-го вида. Выделим эту группу и построим для нее план скоростей (рис. 3.9, б). Скорость точки В определится уравнением:
Известны величина и направление скорости точки А
Известны также направления скоростей : Отрезок ра, изображающий скорость точки А на плане, выбираем произвольным по величине. Масштабный коэффициент Через точку А проводим направление относительной скорости
Рис. 3.9. Пример построения плана скоростей и ускорений структурной группы 2-го вида: а — план механизма; б — план скоростей; в — план ускорений Определяем скорость точки В, измерив отрезок р b на плане и умножив его на масштабный коэффициент
Угловая скорость звена АВ
Вектор относительной скорости показывает, что звено АВ вращается против часовой стрелки (см. рис. 3.9). План ускорений строим по уравнению:
где Вектор касательного ускорения Векторабсолютного ускорения aB направлен параллельно x - x. Точка пересечения направлений двух последних векторов определяет абсолютное ускорение, а также направление и величину касательного ускорения. На плане ускорений, построенном с учетом масштабного коэффициента
Угловое ускорение звена АВ находим по касательной составляющей
Направление углового ускорения находим, перенося вектор касательной составляющей ускорения
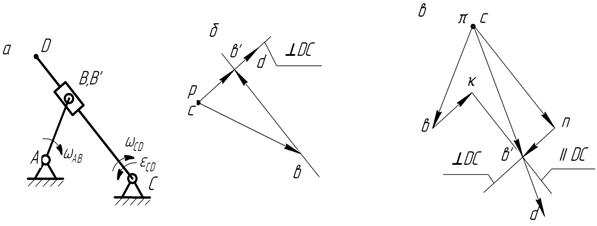
Группа Ассура 3-го вида Построение планов скоростей и ускорений рассмотрим на примере кулисного механизма, который образован присоединением к механизму I класса группы Ассура II класса 3-го вида (рис. 3.10). Дано: кинематическая схема механизма; угловая скорость кривошипа Определить: скорость и ускорение точек В' и D кулисы; угловую скорость и угловое ускорение кулисы. Строим план скоростей (рис. 3.10, б) по векторному уравнению
где
Имеем одно векторное уравнение с двумя неизвестными: величиной VВ' и величиной VВ'В. Перпендикулярно радиусу вращения (длине кривошипа) АВ откладываем отрезок произвольной величины, изображающий известную скорость Через точку b проводим направление относительной скорости (параллельно кулисе DC); через полюс — направление абсолютной скорости точки В' (перпендикулярно кулисе). Точка пересечения определяет скорость точки В' кулисы
Рис. 3.10. Пример построения плана скоростей и ускорений структурной группы 3-го вида: а — план механизма; б — план скоростей; в — план ускорений.
Скорость точки D находим по принципу подобия: строим на плане скоростей отрезок pd, пропорциональный длине кулисы CD
Абсолютная скорость точки D определяется отрезком pd с учетом масштабного коэффициента Угловая скорость кулисы
Направление угловой скорости находим, мысленно перенося вектор относительной скорости с плана скоростей в соответствующую точку механизма. Кулиса вращается по часовой стрелке (см. рис. 3.10, а, б). План ускорений строим по векторному уравнению
где
Второй член уравнения — Кориолисово ускорение, вычисляем его по формуле:
где Направление Кориолисова ускорения определяем поворотом вектора относительной скорости (bb' — на плане скоростей) на 90° в направлении угловой скорости кулисы
Через точку k проводим параллельно С D направление релятивного ускорения. Величина этого ускорения неизвестна, поэтому требуется составить еще одно векторное уравнение. Кулиса вращается неравномерно, поэтому ускорение точки В во вращательном движении вокруг точки С складывается из нормального и касательного
где
Откладываем в направлении от В' к С отрезок, изображающий нормальную составляющую ускорения (см. рис. 3.10, в):
Через точку n проводим направление касательного ускорения (перпендикулярно кулисе). Получаем точку пересечения b', которая определяет ускорение точки В' кулисы
Ускорение точки D находим по принципу подобия
Угловое ускорение кулисы определяем по касательной составляющей
Направление углового ускорения находим, перенося вектор
3.6. Аналоги скоростей и ускорений Во многих случаях при проектировании машин и механизмов законы движения звеньев в функции времени можно определить только на последующих стадиях проектирования, обычно после динамического анализа с учетом приложенных сил [2, с. 61]. В таких случаях движение звеньев определяется в два этапа: сначала устанавливаются зависимости кинематических параметров в функции обобщенной координаты (угла поворота ведущего звена), а затем определяется закон изменения обобщенной координаты во времени. Для выполнения подобных расчетов вводятся понятия аналогов скоростей и ускорений. Аналогом скорости какой-либо точки называется первая производная радиус-вектора этой точки по обобщенной координате. Для поступательного движения перемещение точки можно считать равным радиус-вектору. Тогда аналог скорости согласно определению
где
Скорость данной точки
Учитывая формулу (3.37), получаем связь между истинной скоростью и ее аналогом:
где Физический смысл аналога скорости - это скорость той же точки при Аналогом ускорения точки называется вторая производная радиус-вектора точки по обобщенной координате. Чтобы установить связь ускорения с аналогом ускорения продифференцируем (3.39) по времени
Окончательно получим
где
При вращательном движении звена вводятся понятия аналогов угловых скоростей и ускорений. Аналогом угловой скорости называется первая производная от угла поворота по обобщенной координате механизма
Где Угловая скорость звена
Аналогом углового ускорения называется вторая производная от угла поворота звена по обобщенной координате механизма. Дифференцируя (3.43) по времени, получим
Из формул (3.43) и (3.44) видно, что аналоги угловых скоростей и угловых ускорений являются безразмерными величинами. 3.7. Графическое дифференцирование и интегрирование как Графическое изображение изменения основных кинематических параметров механизма за полный цикл движения называется кинематической диаграммой. Если одна из кинематических функций задана в форме графика или в виде таблицы значений, то найти производную или интеграл от этой функции непосредственно в аналитической форме невозможно. В этом случае используют методы графического дифференцирования и интегрирования. Основное достоинство данного метода, как и у большинства графических методов, - это наглядность и простота; недостаток - невысокая точность по сравнению с аналитическими методами. Метод основан на геометрическом смысле производной, которая представляет собой тангенс угла наклона касательной в данной точке кривой к оси абсцисс. Обычно кривую заменяют ломаной линией и принимают следующее допущение: угол наклона касательных в точках, расположенных посередине каждого участка кривой, равен углу наклона соответствующей хорды. Это вносит некоторую погрешность, но она не суммируется, что обеспечивает приемлемую точность метода [2, с. 110]. На рис. 3.11 изображена кинематическая диаграмма перемещений точки в масштабе. Пусть за бесконечно малый промежуток времени Δt перемещение точки увеличилось на ΔS. Тогда скорость точки на этом участке определится из выражения
Рис. 3.11. К определению кинематических параметров методом кинематических диаграмм.
Из чертежа (см. рис. 3.11) следует, что ΔS/Δt =tgα, а с учетом принятого допущения это и есть первая производная (в пределе хорда превратится в касательную). Поэтому
Проведем из точки Р, расположенной влево от оси абсцисс на произвольном расстоянии Н, прямую, параллельную хорде ab, до пересечения с осью ординат. Эта прямая отсекает на оси ординат отрезок ОА, длина которого определяется из треугольника АОР
Разделив (3.46) на (3.47), получим
Правая часть уравнения содержит только постоянные величины, следовательно, она является также величиной постоянной и представляет собой масштабный коэффициент скорости.
Таким образом, отрезок ОА, отсекаемый лучом РА на оси ординат, изображает скорость на бесконечно малом участке Δt в масштабе скоростей μ V.
Бердюгина О.В., Эльяш Н.Н.
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Учебное пособие
Екатеринбург 2017
Бердюгина О.В., Эльяш Н.Н. «Теория механизмов и машин»: учебное пособие для студентов направления обучения ««Эксплуатация транспортно-технологических машин и комплексов», Бердюгина О.В., Эльяш Н.Н., Екатеринбург: Изд-во УрГАУ, 2018. - 60с.
Одобрено на заседании кафедры ТТМ протокол №2 от 17января 2018г.
© ФГБОУ ВПО «Уральский государственный аграрный университет», 2018 © Бердюгина О.В., Эльяш Н.Н.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ Пособие предназначено для изучения курса «Теория механизмов и машин» (ТММ). Может быть также полезным при изучении дисциплины «Техническая механика». Курс ТММ является переходным от общетехнических дисциплин к специальным и служит развитию у студентов практических навыков исследования и проектирования различных механизмов; что позволяет расширить технический кругозор и подготовить будущего специалиста к решению разнообразных инженерных задач. В книге рассмотрены вопросы структурного, кинематического и динамического анализа. Материал изложен таким образом, что он побуждает студента в процессе выполнения курсовой работы, расчетно-графических работ либо контрольных работ, использовать теоретический материал как средство решения практических задач, что способствует реализации активных методов обучения. В конце каждой главы приведены вопросы для самоконтроля. Курс "Теория механизмов и машин" (ТММ) представляет собой один из важнейших разделов технической механики и является базовой наукой для изучения специальных учебных дисциплин машиностроительного профиля. Основные задачи курса: научить студентов методам исследования механизмов и машин, умению технически грамотно выполнять расчеты и владеть методами проектирования механизмов. Компетенции, формирующиеся у студентов при выполнении курсовых проектов, ориентированы на применение полученных теоретических знаний, что позволяет осуществить взаимосвязи абстрактного и конкретного мышления, обеспечивает системно-деятельностный подход. Практика самостоятельного обоснования и принятия решений при проектировании создает необходимую базу для саморазвития личности. Основными разделами данного учебного пособия являются анализ (исследование) механизмов и их синтез (проектирование) схем механизмов. В процессе изучения дисциплины студент должен не только получить теоретические знания, но и развить навыки в их приложении к решению практических задач, приобрести опыт работы с учебной и специальной литературой, а также приобрести основы для научно-исследовательской работы. Особенность предлагаемого пособия состоит в реализации междисциплинарных связей, что обусловливает мотивацию на изучение других общетехнических дисциплин, предусмотренных учебными планами. Вследствие различий в учебных планах специальностей и уровней квалификации, возможны разные формы самостоятельной работы студентов (курсовой проект, расчетно-графические работы, контрольные работы). Поэтому данное пособие составлено с учетом выполнения студентами любой из форм самостоятельной работы, ориентируясь на модульный принцип, соответственно профилю подготовки и требуемому уровню компетенций. 1. ОБЩИЕ СВЕДЕНИЯ О СТРОЕНИИ МЕХАНИЗМОВ 1.1. Основные понятия и определения
Машиной называется устройство, предназначенное для преобразования энергии, материалов или информации с целью облегчения или исключения труда человека. Соответственно, машины бывают энергетические, технологические и транспортные, информационные. Механизмом называется система твердых тел, служащих для преобразования одних видов движения в другие. В настоящее время известно 8 видов механизмов, которые классифицируются по принципу передачи движения: 1) плоские механизмы, у которых движение всех точек происходит в одной плоскости или в параллельных плоскостях; 2) пространственные механизмы, у которых движение точек происходит в разных плоскостях (пересекающихся); 3) кулачковые механизмы, в состав которых входит кулачок — звено переменного профиля; 4) зубчатые механизмы, у которых движение передается по взаимоогибаемым кривым. Эти механизмы могут быть как плоскими, так и пространственными; 5) фрикционные механизмы, у которых движение передается за счет сил трения (фрикционные муфты, вариаторы); 6) механизмы с гибкими связями, у которых движение передается с помощью ремней, цепей, канатов на большие расстояния; 7) волновая передача, которая основана на деформации звеньев (диафрагмы или гибкого колеса); 8) гидравлические или пневматические механизмы, в которых преобразование движения твердых тел происходит посредством жидкости или газа. Жидкости или газы не считаются звеньями, новходят в состав механизма. Все механизмы состоят из звеньев, которые представляют собой одну деталь, либо несколько неподвижно соединенных между собой деталей. В свою очередь звенья бывают подвижными или неподвижными. Неподвижное звено называют стойкой. За стойку принимают основание, раму, корпус, фундамент и все, что с ними неподвижно связано. Стойка в механизме только одна. Подвижные звенья бывают входные (ведущие) и выходные (ведомые). Входным называют звено, к которому приложено движение извне, а выходным – звено, которое совершает требуемое движение, для выполнения которого служит данный механизм. Поверхности, линии, точки звена, по которым оно соприкасается с другим звеном, называют элементами звена [1, с. 18-21]. Кинематические пары, их классификация
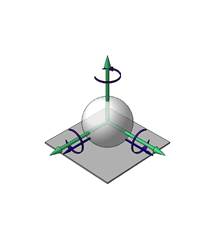
Рис. 1.1. Возможные движения в пространстве звена, не связанного кинематической парой с другим звеном. Подвижные звенья соединяются между собой либо со стойкой; при этом на движение накладывается определенное количество связей (ограничений движению). Подвижное соединение двух соприкасающихся звеньев называется кинематической парой. Как известно, любое звено, не связанное с другим звеном, в пространстве имеет шесть степеней свободы (шесть независимых движений), показанных на рисунке 1.1. Если соединить два звена между собой, то, в зависимости от вида соединения, может быть ограничено 1, 2, 3, 4 или 5 движений. Если ограничить все 6 движений, то получим одно неподвижное звено, и кинематическая пара перестанет существовать. Если звенья не соприкасаются, то кинематической пары также не существует, а есть только свободные звенья.
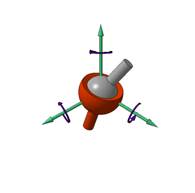
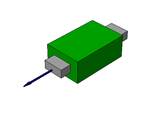
Рис 1.2. Примеры кинематических пар 1-го, 2-го, 3-го, 4-го, 5-го классов.
Таблица 1. Классификация кинематических пар.
Продолжение табл. 1
Таким образом, для существования кинематической пары необходимы три условия: - наличие двух звеньев; - контакт между звеньями; - возможность относительного движения звеньев.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-12-17; просмотров: 192; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.101.95 (0.179 с.) |

 .
.
 ;
;  .
. ;
;  .
. .
. ; через полюс проводим направление абсолютной скорости точки В — горизонтальную прямую, параллельную х — х.
; через полюс проводим направление абсолютной скорости точки В — горизонтальную прямую, параллельную х — х.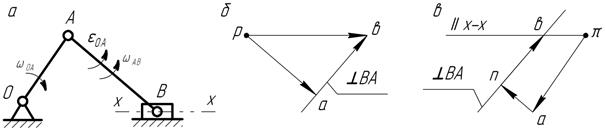
 .
. .
.
 , вектор направлен от точки А к центру вращения – точке О.
, вектор направлен от точки А к центру вращения – точке О. , вектор направлен от точки В к центру вращения – точке А.
, вектор направлен от точки В к центру вращения – точке А. .
. , правая часть уравнения изображена соответствующими векторами
, правая часть уравнения изображена соответствующими векторами  ,
,  ,
,  . Результирующий вектор
. Результирующий вектор  изображает абсолютное ускорение точки В.
изображает абсолютное ускорение точки В.

 .
.
 — скорость точки В', принадлежащей кулисе;
— скорость точки В', принадлежащей кулисе; — скорость точки В конца кривошипа и кулисного камня;
— скорость точки В конца кривошипа и кулисного камня; — относительная, скорость движения камня по кулисе.
— относительная, скорость движения камня по кулисе. ;
; 
 перпендикулярна кулисе DC;
перпендикулярна кулисе DC;  параллельна DC.
параллельна DC. . Масштабный коэффициент плана скоростей
. Масштабный коэффициент плана скоростей  .
.
 .
. .
. определится из соотношения
определится из соотношения

 - нормальное ускорение переносного движения (ускорение точки В конца кривошипа и кулисного камня). Вектор нормального ускорения направлен параллельно АВ от точки В к точке А. Откладываем в этом направлении отрезок произвольной величины (рис. 3.10, в) и определяем масштабный коэффициент плана ускорений
- нормальное ускорение переносного движения (ускорение точки В конца кривошипа и кулисного камня). Вектор нормального ускорения направлен параллельно АВ от точки В к точке А. Откладываем в этом направлении отрезок произвольной величины (рис. 3.10, в) и определяем масштабный коэффициент плана ускорений
 ,
, (см. рис. 3.10, б).
(см. рис. 3.10, б). . Из точки b (рис. 3.10, б) откладываем
. Из точки b (рис. 3.10, б) откладываем 

 , так как С — неподвижная точка, и ее ускорение изображается на плане нулевым отрезком (совпадает с полюсом).
, так как С — неподвижная точка, и ее ускорение изображается на плане нулевым отрезком (совпадает с полюсом). ; вектор направлен параллельно ВʹС.
; вектор направлен параллельно ВʹС. .
.
 ;
;  .
. , которая на плане ускорений изображается отрезком
, которая на плане ускорений изображается отрезком 

 (3.37)
(3.37) - обобщенная координата (угол поворота звена 1);
- обобщенная координата (угол поворота звена 1); - перемещение точки i -ro звена.
- перемещение точки i -ro звена. , поэтому
, поэтому (3.38)
(3.38) (3.39)
(3.39) - угловая скорость начального звена.
- угловая скорость начального звена.  ; единица измерения аналога скорости - метр.
; единица измерения аналога скорости - метр. (3.40)
(3.40) (3.41)
(3.41) - ускорение точки i -го звена;
- ускорение точки i -го звена; - аналог ускорения той же точки;
- аналог ускорения той же точки; - угловое ускорение начального звена.
- угловое ускорение начального звена. , (3.42)
, (3.42) - угол поворота i -го звена.
- угол поворота i -го звена. связана с ее аналогом соотношением:
связана с ее аналогом соотношением: (3.43)
(3.43) (3.44)
(3.44) (3.45)
(3.45)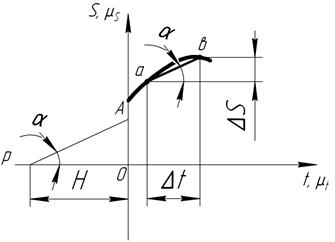
 (3.46)
(3.46) (3.47)
(3.47) (3.48)
(3.48) (3.49)
(3.49) 3.8. Метод кинематических диаграмм
3.8. Метод кинематических диаграмм