Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
ЛР-1 Расчет разности широт и долгот ( РГЗ 2.1 )Стр 1 из 7Следующая ⇒
ЛР-1 Расчет разности широт и долгот (РГЗ 2.1)
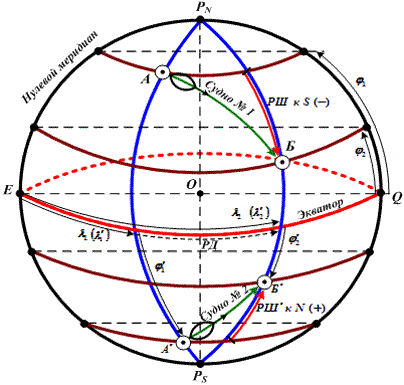
Разность широт и разность долгот Пункт (т. А или т. А′), откуда вышло судно, называется пунктом отхода. Пункт отхода характеризуется начальными координатами (φ 1, λ 1 или φ 1 ′, λ 1 ′). Пункт (т. Б или т. Б′), в который пришло судно, называется пунктом прихода. Пункт прихода характеризуется конечными координатами (φ 2, λ 2 или φ 2 ′, λ 2 ′). Тогда: – изменение широты (φ), при переходе судна из одного пункта в другой будет называться разностью широт и сокращенно обозначается как Δ φ – основное обозначение или как РШ – запасное обозначение. Разность широт (Δ φ) измеряется отрезком дуги (меньшей дуги) меридиана между параллелями пунктов отхода и прихода.
Если судно перемещается в направлении северного полюса P N (рис. 1.4 судно № 2), то разности широт (Δ φ) дается наименование «к северу» («к норду»), и обозначается – к N, а при вычислениях ей приписывается знак «+». Пример: φ 1 ′ = 75°00,0′ S, φ 2 ′ = 25°00,0′ S (судно № 2), тогда: РШ′ (Δ φ′) = φ 2 ′ − φ 1 ′ = –25°00,0′ – (–75°00,0′) = +50°00,0′ или 50°00,0′ к N. Если же судно перемещается в направлении южного полюса P S (рис. 1.4 судно № 1), то разности широт (Δ φ) дается наименование «к югу» («к зюйду»), и обозначается – к S, а при вычислениях ей приписывается знак «–». Пример: φ 1 = 70°00,0′ N, φ 2 = 45°00,0′ N (судно № 1), тогда: РШ (Δ φ) = φ 2 − φ 1 = 45°00,0′– (+70°00,0′) = –25°00,0′ или 25°00,0′ к S. Разность широт измеряется в пределах от 0° до ±180° (к N или к S). Разностью долгот называется изменение долготы (λ) при переходе судна из одного пункта в другой и сокращенно обозначается как Δ λ – основное обозначение, или как РД – запасное обозначение. Разность долгот (Δ λ) измеряется меньшей дугой экватора, заключенной между меридианами пунктов отхода и прихода.
Если судно перемещается к востоку (восточная долгота увеличивается, западная долгота уменьшается), то разности долгот дается наименование «к востоку» («к исту»), и обозначается – к Е, а при вычислениях ей приписывается знак «+».
Задачи на расчет значений (Δφ, Δλ, φ2, λ2) ЛР-2 Дальность видимости горизонта и ориентиров в море (РГЗ 2.2) Дальность видимости горизонта Наблюдаемая в море линия, по которой море как бы соединяется с небосводом, называется видимым горизонтом наблюдателя. Если глаз наблюдателя находится на высоте е М над уровнем моря (т. А рис. 2.13), то луч зрения идущий по касательной к земной поверхности, определяет на земной поверхности малый круг аа, радиуса D.
Рис. 2.13 Дальность видимости горизонта Это было бы верно, если бы Землю не окружала атмосфера. Если принять Землю за шар и исключить влияние атмосферы то, из прямоугольного треугольника ОАа следует: ОА=R+e
Так как величина
Под действием земной рефракции, в результате преломления зрительного луча в атмосфере, наблюдатель видит горизонт дальше (по кругу вв).
где х – коэффициент земной рефракции (≈ 0,16). Если принять дальность видимого горизонта De в милях, а высоту глаза наблюдателя над уровнем моря (е М) в метрах и подставить значение радиуса Земли (R =3437,7 мили = 6371 км), то окончательно получим формулу для расчета дальности видимого горизонта
Рис. 2.14. Дальность видимости ориентиров в море Из рис. 2.14 очевидно, что дальность видимости предмета (ориентира), имеющего высоту над уровнем моря h М, с высоты глаза наблюдателя над уровнем моря е М будет выражаться формулой:
Формула (2.9) решается с помощью таблицы 22 «МТ-75» с. 248 или таблицы 2.3 «МТ-2000» (с. 256). 3. Дальность видимости огня ориентира, показанная на карте (рис. 2.16)
Рис. 2.16. Дальности видимости огня маяка На навигационных морских картах и в навигационных пособиях дальность видимости огня ориентира дана для высоты глаза наблюдателя над уровнем моря е = 5 м, т.е.:
Если же действительная высота глаза наблюдателя над уровнем моря отличается от 5 м, то для определения дальности видимости огня ориентира необходимо к дальности, показанной на карте (в пособии), прибавить (если е > 5 м), или отнять (если е < 5 м) поправку к дальности видимости огня ориентира (Δ D K), показанной на карте за высоту глаза.
Магнитные направления Связь магнитных и истинных направлений осуществляется по формулам:
(формулы алгебраические). Системы счета направлений Круговая система счета Круговая система счета направлений является основной системой счета. В этой системе горизонт делится на 360° (рис. 2.3) и счет направлений ведется от 0° до 360° от северной части истинного меридиана наблюдателя N И вправо по ходу часовой стрелки.
Рис. 2.3. Круговая система счета направлений Наблюдатель (т. А) – в центре. Тогда направления:
Если при расчете направлений получится значение более 360° (390°), то от результата следует вычесть 360° (т.е. один оборот 390° – 360° = 30°). Круговая система счета направлений применяется в судовождении для определения направления движения судна (курс) и определения направления с судна на береговые ориентиры, соседние суда и пр. (пеленг).
Полукруговая система счета
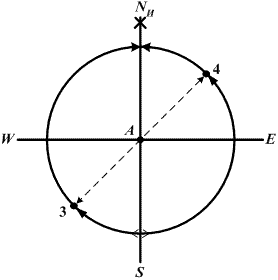
Рис. 2.4. Полукруговая система счета направлений В полукруговой системе счета (рис. 2.4) счет направлений ведется от северной или южной части истинного меридиана наблюдателя в сторону востока Е или запада W в пределах от 0° до 180°. Для исключения многозначности в полукруговой системе счета числовому значению направления дается наименование. Например: т.1 N 45° E; т.2 N 105° W (рис. 2.4 а). т.3 S 45° W; т.4 S 135° E (рис. 2.4 б). Первая буква наименования – от какой части ИМН (N или S) идет счет. Вторая буква наименования – в каком направлении идет счет (к Е или к W). Полукруговая система счета обычно применяется в мореходной астрономии.
Правила перехода от полукруговой системы счета направлений в круговую:
Четвертная система счета
Рис. 2.5. Четвертая система счета направлений В четвертной системе счета направлений (рис. 2.5) счет направлений ведется от северной (N) и южной (S) части ИМН в сторону востока (Е) и в сторону запада (W) в пределах от 0° до 90°. В данной системе счета числовому значению направления дается наименование, соответствующее наименованию четверти. Например: т.1 10° NE; т.2 10° SE; т.3 30° SW; т.4 70° NW. Четвертная система счета направлений также будет нам встречаться при решении задач мореходной астрономии.
Переход от четвертной системы счета к круговой аналогичен изложенному в п. Б, т.е.:
Румбовая система счета Была основной системой счета направлений во времена парусного флота.
Всего 32 румба -направления. 1 румб = 11 1/4 ° (111/4° · 32 = 360°). Румбы в градусной мере
Истинный курс судна
Истинный пеленг на ориентир
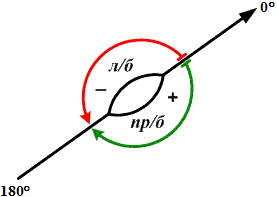
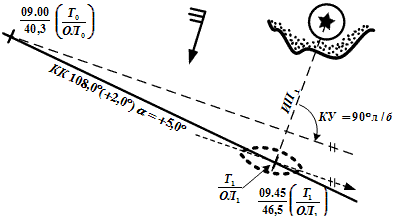
Курсовым углом называется горизонтальный угол в плоскости истинного горизонта наблюдателя между носовой частью продольной оси судна (ДП судна) и направлением из точки наблюдения на объект (ориентир). Курсовой угол измеряется в полукруговой системе счета направлений от 0° до 180° левого (л/б) и правого (пр/б) бортов (рис. 2.9).
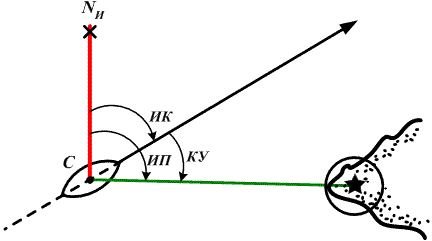
Рис. 2.9. Курсовой угол Курсовой угол обозначается – как КУ или q. При вычислениях курсовому углу правого борта (КУ пр/б) придается знак «+», а курсовому углу левого борта (КУ л/б) – знак «–». Курсовые углы, равные 90° (90° пр/б, 90° л/б) получили название «траверзных» курсовых углов. Курсовые углы, равные 45° (45° пр/б, 45° л/б) – «крамбола». Курсовые углы, равные 135° (135° пр/б, 135° л/б) – «раковина» или «подзор». Все истинные направления (ИК, ИП, КУ) связаны между собой соотношениями, которые легко установить из рис. 2.10.
Рис. 2.10. Истинные направления
Формулы алгебраические.
При решении задач по данным формулам необходимо знать, что:
Цель занятия Научиться правильно рассчитывать курс и плавание между двумя точками, координаты которых известны. План проведения занятия 1. Расчет координат пункта прихода по известным координатам пункта отхода, по курсу и плаванию. 2. Расчет курса и плавания между двумя точками, координаты которых известны. Теоретические положения Формулы письменного счисления: РШ = S cos К; ОТШ = S sin К;
РД = ОТШ sec j т. Рассчитанные по ним таблицы служат для решения следующих задач. Расчет координат пункта прихода по известным координатам пункта отхода, по курсу и плаванию: 1. РШ и ОТШ выбирают из табл. 24 МТ-75 по аргументам ИК и S. РШ и ОТШ из таблицы выбирают с точностью до 0,01’ и округляют до 0,1’ при расчете координат. Если S более 100 миль, то его значение разделяют на несколько слагаемых, равных или менее 100 миль каждое, для которых и выбирают из таблицы РШ и ОТШ; затем находят суммарное значение РШ и ОТШ. При учете дрейфа вместо ИК аргументом для входа в таблицу служит ПУа. Целое число градусов, ближайшее большее или меньшее, а затем интерполируют на искомое значение. Наименование РШ и ОТШ определяют по наименованию четверти, в которой лежит ИК (ПУа), причем первая буква соответствует наименованию РШ, вторая — наименованию ОТШ. 2. Рассчитывают среднюю широту: jт =j1+РШ/2 Расчет ведут с точностью до 0,10. 3. РД выбирают из табл. 25 МТ-75 по аргументам j т и ОТШ. При выборе РД по ОТШ последнее разбивают на части, кратные целым числам, имеющимся в таблице, а полученную по частям РД затем суммируют. РД всегда одного наименования с ОТШ. 4. Координаты пункта прихода рассчитывают по формулам:
jт =j1+РШ; lт =l1+РД.
Примечание, если вторым действием рассчитать широту пункта прихода, то jго может быть рассчитана по формуле jт =(j1+j2)/2.
Расчет координат пункта прихода по формулам: 1. РШ = S cos К(ответ в минутах перевести в градусы). 2. ОТШ = S sin К (ответ в минутах). 3. j2 =j1+РШ. 4. jm=j1+РШ/2. 5. РД = ОТШ sec jm. 6. l2 =l1+РД.
Расчет курса и плавания между двумя точками, координаты которых известны: 1. Рассчитывают РД, РШ и РМЧ по формулам: РД = (l2-l1)'; РШ = (j2– j1)'; РМЧ = МЧ2 – MЧ1 причем МЧ1 выбирают по j1, МЧ2 — по j2 из табл. 26 МТ-75. Рассчитанные РД и РШ необходимо перевести в минуты. РМЧ выражена и экваториальных минутах (милях) и всегда одного наименования с РШ. 2. Постоянный курс судна рассчитывают по формуле tgИК = (l2–l1)/РМЧ. Курс получают в четвертном счете, и для его перевода в круговой счет необходимо помнить, что первая буква четверти соответствует наименованию РШ, вторая буква — наименованию РД. 3. Расчет плавания: S = РШ sec ИК. Пример № 6.1: Судно должно перейти из точки с координатами j1= 20°14´,6 S, l1= 5°22´,7 W в точку с координатамиj2 = 23°29´,4 S l2 = 2°06´,9 Е. Рассчитать постоянный курс и расстояние между этими точками. Решение: Расчет РД, РШ и РМЧ
Расчет курса
Расчет плавания
ЛР № 7 Решение элементарных задач на морской навигационной карте
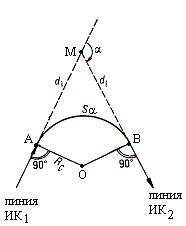
Оформление графического счисления пути судна на путевой карте Обратная задача. Заданы линия начального курса (ИК1) и линия нового курса(ИК2). Требуется определить положение точки А, в которой следует начать поворот, чтобы после циркуляции оказаться на заданной линии нового курса, и положение точки В конца поворота.
1. При заданном угле перекладки руля dR рассчитывается расстояние до нового курса
2. Расстояние d 1 откладывается от точки М пересечения начального и нового курсов по линиям ИК1 и ИК2. В результате будут получены точка начала поворота А и точка окончания поворота В. 3. Время и отчёт лага рассчитываются также как и при решении прямой задачи.
После расчёта элементов циркуляции при решении обеих задач (прямой и обратной) рассчитывается расстояние "мертвого" промежутка sm = VtM, где V - скорость судна перед поворотом (выбирается из таблицы маневренных элементов); tM – время "мертвого" промежутка (определяется экспериментально). Порядок расчета п редвычисления счислимого места: 1. рассчитывается промежуток времени от исходного момента Т1, до заданного Т2 по формуле tсч = Т2 – Т1; и расстояние, которое будет пройдено судном расчетной скоростью V об за этот промежуток времени: Sоб = Vоб ∙ tсч; (при плавании менее часа Vоб = (каб/мин), а t сч = (мин), и полученный результат Sоб = (каб) перевести в (мили); 2. рассчитанное расстояние откладывается по линии ИК и отмечается счислимое место на заданное время Т2; для последующего контроля рассчитывается отсчет лага ОЛ2, который должен наблюдаться в заданное время ОЛ2 = ОЛ1 + РОЛ, где РОЛ = Sоб / Кл. Порядок расчета п редвычисления времени прихода судна в заданную точку: а) с карты снимается расстояние до заданной точки; б) рассчитывается промежуток времени, необходимый для прохождения расстояния S с заданной скоростью Vоб: tсч = S / Vоб; в) рассчитывается время прихода судна в заданную точку Т2 = Т1 + tсч, где Т1 — время, когда судно находилось в исходной точке. Оформление графического счисления пути судна на карте
Расчет истинного и компасного курсов по известным линии пути при дрейфе и значению угла дрейфа.
Нанесение (нахождение) счислимой точки на навигационной карте на заданный момент времени
Предвычисление времени и отсчета лага прихода судна в заданную точку.
Оформление графического счисления пути судна при учете течения Решение прямой задачи
Решение ОБРАТНОЙ задачи
Приложение 4 ЛР-1 Расчет разности широт и долгот (РГЗ 2.1)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-26; просмотров: 1824; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.93.221 (0.143 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


 чрезвычайно мала (для е = 50 м при R = 6371 км – 0,000004), то окончательно имеем:
чрезвычайно мала (для е = 50 м при R = 6371 км – 0,000004), то окончательно имеем:




 − 4,7 мили
− 4,7 мили